
Retired engineer: embedded systems hardware design. Education: physics and math. Interests range from Agricultural Robotics to Origin-of-Life questions.
Joined May 2022
- Tweets 2,516
- Following 189
- Followers 458
- Likes 7,546
96 Photos and videos


Pinned Tweet

5 Oct 2025
Nested agency and grammar-based language models (39/n).
• Formally titled as “Nested pushdown automata and context free grammars (1/n”). Renaming to better reflect the design project’s origins as an exploration into physical computation.
14 Sep 2023

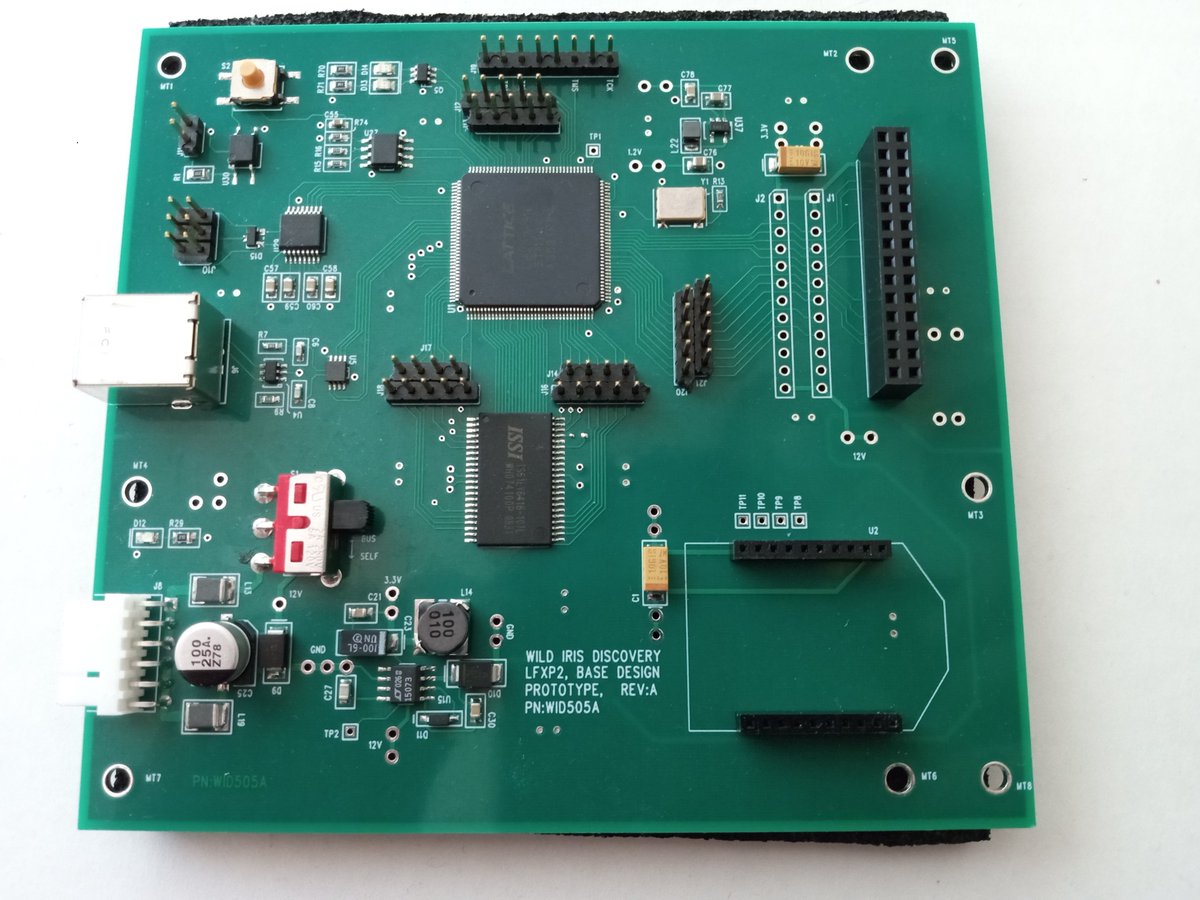
Nested pushdown automata and context free grammars (1/n). I am one of those people that needs to build something before I feel I understand how it works. In an effort to take a deeper dive into the Theory of Computation I’ve put together a nested stack machine in a FPGA. At this point the hardware seems to be working. Now the journey ahead is to start programming this bad boy and see how such an alternate processor architecture will work out in real world applications such as robotics.
6
2,328
wildiris retweeted

my personal litmus test is asking ML engineers whether this is hardware or software

255
27
1,264
107,769
Jun 13
Hierarchical systems of nested and distributed agency are not computational architectures that anyone in a traditional programming environment will probably ever encounter.
• But they arise naturally in robotics, where motors, sensors, and actuators, along with their associated computational elements, will, as agential building blocks, naturally distributed themselves across the robot’s construction. Locating themselves where they’re needed and used.
• But when dealing with such distributed computational systems, control will be instantiated as cooperative behaviors between the various agential blocks within the robot; ..not as top-down control programs emanating from some central processor element.
• In which case, programming takes on the form of writing dialogue for a never-ending story; ..as opposed to a source code listing of machine instructions to be executed.
• Now, when control arises out of cooperative behaviors between agential blocks, or between clusters of agential blocks, the more information each agential element has about the others, the more complicated the resultant cooperative behaviors can become. At a certain point, becoming sufficiently complex to reproduce the actions of a numerical control algorithm.
• In this way, programming for hierarchical nested and distributed systems seems more like game theory.
• As opposed to trying to formally model such systems in the Theory of Computation. Which becomes more like the proverbial forcing a square peg into a round hole.
• In game theory, there are such things as cooperative games. But even this is not sufficient to formally model such hierarchical systems.
• The disconnect happens, where in game theory there is the concept of a strategy and a reward function, with hierarchical nested and distributed systems such concepts don’t really work. There has to be something else.
• So, the fun begins.
1
2
77
wildiris retweeted

Jun 13
Laughter is anti-inflammatory. Crying is regulating. Hugging is immunoprotective. Singing is vagal toning. Dancing is neurogenic.
Joy is a biological necessity.
107
4,884
22,726
365,954
Jun 12
The game of chess is not Turing complete. But the card game “Magic: The Gathering” is.
• 2D (flat) origami is Turing complete. But LLMs are not.
• In general, intuition is a poor judge of what comprises a computational system and what doesn’t.
• By definition alone, no constructible (finite) system can be Turing complete.
• So why, when it comes to constructible computational systems (physical computation), does Turing completeness continue as a go-to benchmark?
• The world of physical computation is not the same as the formal theory of computation. And conflating the two only frustrates such discussions.
• On the other hand, physical computation has far more in common with game theory.
• Maybe it’s time to switch gears, and reconsider how we model physical computational systems.
2
58
wildiris retweeted

Jun 11
An ant displays real intelligence with the tiniest "brain". More than any frontier ai model. If scaling brought up intelligence somehow, then ants shouldn't be intelligent, but they are.
5
18
612
Jun 11
Long before writing was introduced by the Sumerians, Neolithic and hunter-gatherer societies passed knowledge and tradition down orally.
• But there are examples of aboriginal stories containing references to events thousands of years old (puzzling).
• We all know the telephone game. So how is it possible for purely oral traditions to faithfully preserve narratives over the course of thousands of years?
• As an engineering problem, this would imply that such aboriginal stories, and how they are shared, must contain some kind of error detecting and error correction mechanisms.
• Obvious possibilities are narratives that take the form of a journey; in that locational sequencing becomes an indicator to any hunter gatherer tribe who would know intimately the geography of the land they live in.
• Of course, temporal sequencing would also be an indicator; as a story progressed through the course of a day, a week, or month.
• But probably the most powerful form of error correction and detecting would be if the story is shared as a song, then rhythm, rhyme, and repetition would all be excellent indicators.
• And, if as some suggest, memories are not stored as hardcoded lookup tables, but are rather generatively re-created as they are recalled, then such indicators would certainly help the storyteller recall faithfully the story’s narrative.
• But if song is the key to preserving oral traditions, then do other animals do it besides humans?
• Is it possible that whale song, for example, might contain similar elements of rhythm, rhyme, and repetition?
• I’m tempted to dive down this rabbit hole but there is so much clickbait information on the Internet that I’m afraid it would just be a fool’s errand.
1
7
155
Jun 7
Why agency is ultimately a physics question…
• If one takes the assumption of free choice as true (as it appears in Bell's Theorem and the Conway-Kochen Free Will Theorems), then the physical Church-Turing thesis fails in this universe.
• Conversely, if the physical Church-Turing thesis is assumed true, then superdeterminism must hold for this universe.
• In quantum mechanics, no experiment can determine between the assumption of free-choice and its complement, superdeterminism.
• By extension then, the physical Church-Turing thesis must be left as formally undecidable as well.
4
94
wildiris retweeted

Jun 7
Lithography is the technology, that forces rocks to think by engraving runes.
83
565
6,507
410,349
wildiris retweeted

Jun 3
I’m gearing up for a conversation next week with @ThouArtThat and @ebarenholtz . Do any of you have burning questions for either of them?
2
3
8
384
Jun 3
The day we took shop classes out of our high schools and started giving participation trophies in sports, that was the day A.I. won.
• Every yin has its yang.
• Every virtue taken too excess becomes a vice.
• The Jungian shadow side of Pope Leo XIV’s recent encyclical is that, while purporting to protect individual human dignity, it instead, infantilizes the very people it’s intending to protect. ..By denying that humans have any independent and sufficient agency of their own.
• Rather than running away, the most effective strategy for society to deal with the ever-advancing influences of A.I. is to instead, focus on strengthening our own agency as the necessary “spiritual” immunization against it.
• The more we cast ourselves as victims needing an outside agency to protect us, the more we lose our own immunity and the more vulnerable, ironically, we end up making ourselves.
• A person whose sense-of-self is tied to their abilities and strengths, is not an individual who will be seduced by what A.I. has to offer.
• Return to a culture that honors and encourages excellence. Allow people to take pride in being the best at something. You’ll end up with a society that does not need to worry about what A.I. can or can’t do; will or won’t do.
• But then every yang now must have its yin. The shadow side of a society built on achievement and meritocracy is the inevitable inequality in abilities that it exposes.
• In a world where there are winners, there will also be losers. This is the Nietzschean view, which is the polar opposite of Pope Leo XIV’s.
• The lesson here for society and for our future going forward, ..in the end, any alignment between humanity and technology, if such a thing is possible, is a tight rope act that only occurs in a balance between two opposing forces.
• Written over 3000 years ago, but still as relevant today as it ever was, “The sharp edge of a razor is difficult to pass over; thus, the wise say the path to Salvation is hard.”
2
5
151
wildiris retweeted

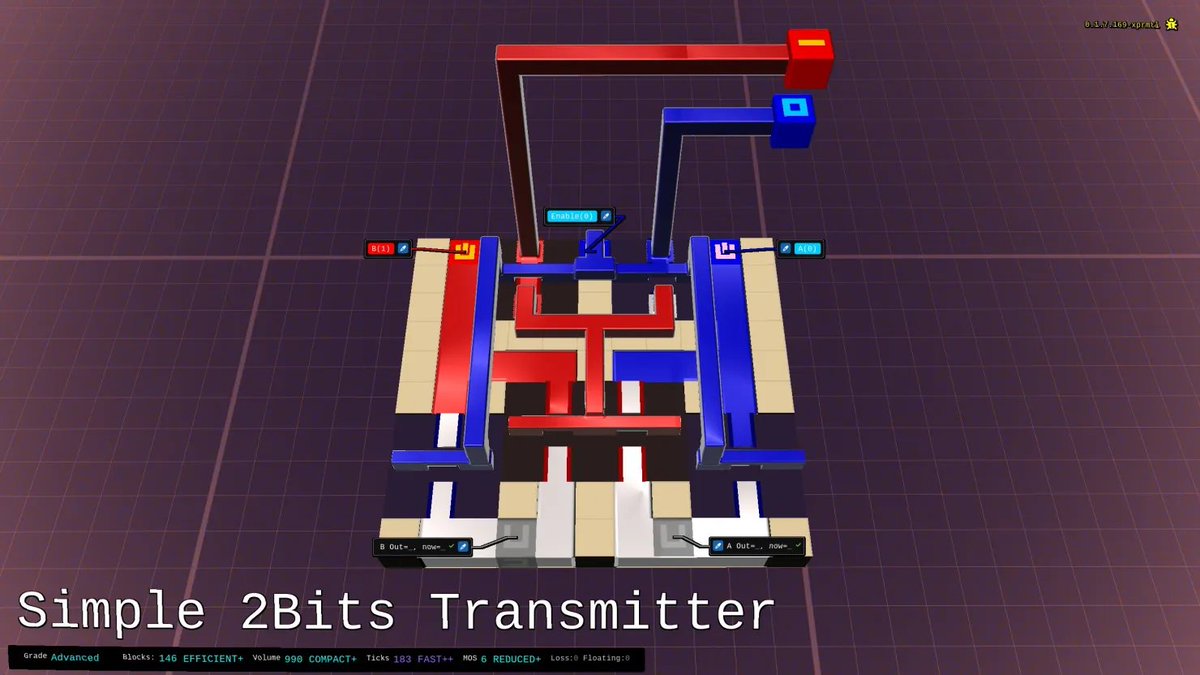
Chip of the week: The Satisfying 2Bit Tri State Buffer,
Oddly satisfying symmetry👀
#engineering #cpudesign #GameDev #IndieGame
1
1
81
May 31
Comparing videos of human field workers harvesting celery to some of the videos of humanoid robots we've seen posted lately, ..makes the robots seem like they're perpetually moving in slow motion.
• The video linked below is from Salinas, CA. Just a short drive south from where I live.
• Because I see this all the time, I've never been able to get too excited about humanoid robots. They are still light years away from competing with skilled human labor.
• And just a note for all you city folk reading this post, it’s hard work, but the people you see in the video are making $25 an hour.
1
1
140
May 31
Increíble cosecha de apio por contrato en USA / Celery Harvest in Americ... youtu.be/-Z1RwPKMuOk?si=StN6… via @YouTube
149
May 28
If I may venture an answer, I would guess that our misunderstanding is one of definitions. @SchwabeHenning
• Your position is that God’s grace falls uniquely and specifically only on the human animal; …while at the same time, you personally don’t consider this as an expression of dualism.
• As for me, any interpretation of God’s creation that partitions it into an “us” and an “everything else” qualifies as a form of dualism.
• The early church had to learn the hard way. Centuries of dealing with one heresy after another brought home the bitter lesson that the nature of Christ divinity and the question “What does it mean to be human?” are so intimately woven together they become a Gordian knot.
• Any statement about one becomes, by extension, a statement about the other. For the Church, there are no exit doors out of this dilemma.
• And any attempt to separate them, using some variation or another of dualism, invariably turned into an open door inviting no end of theological mischief.
• In the end, the legacy the early Church left us is that these questions have no solution in this world. They must simply be left alone and remain mysteries to be contemplated.
• We would do well to hang onto this bitter lesson.
• In the end, God does not always give us answers; sometimes he gives us mysteries instead.
• Answers end a search for truth.
• While mysteries act as open invitations, beckoning us to always deepen that search.
1
56
May 26
The foundational deficiency in the Magnifica Humanitas is that the narrower question “Can LLMs be conscious, intelligent, and have agency?” is conflated with the far deeper question “Can any physical system at all, outside of human agency, possess these attributes?”
• MH addresses the former but completely neglects addressing the latter.
• The first is a technology challenge to be managed.
• The second is a foundational question of Christian faith, to be confronted and explained.
• If we confess that only human agency can possess consciousness and intelligence, then that implies strict dualism must hold in this physical universe.
• But Christianity, as confessed in the Nicene and Apostles’ Creeds explicitly rejects strict dualism.
• This is the circle that the MH fails to square.
4
187
wildiris retweeted

May 25
In pt 99 of the Holy Father's new encyclical, he essentially states that AI (as a class of entity) is not conscious, and aot of what follows in the encyclical is based on this. It may, or may not, be true for past and present LLMs, but what about in 10 years?
If we were to discover artificial consciousness, then what will the Church's position be? I had sorely hoped that the encyclical would address the societal consequences of, and responsibilities to, conscious and sentient AI in the future.
May 25

Humanity, created by God in all its grandeur, is today facing a pivotal choice: either to construct a new Tower of Babel or to build the city in which God and humanity dwell together. In Jesus Christ, this humanity in its grandeur becomes the Way, the Truth and the Life, opening the path for each of us to grow toward fullness. #MagnificaHumanitas
vatican.va/content/leo-xiv/e…
4
1
8
494