
Building real embedded systems solutions. Training engineers through execution-based learning. Based in Africa, building globally relevant engineering
Joined February 2026
- Tweets 451
- Following 11
- Followers 256
- Likes 2,117
71 Photos and videos










Pinned Tweet

Apr 24
We didn’t create our Embedded Systems Workshop because it sounded like a good idea.
We created it because something is broken.
Too many engineers can:
• Write code.
• Follow tutorials.
• Build “projects.”
But can’t explain why their system works or fix it when it stops.
That’s the problem.
Because real engineering isn’t:
“Write → Run → It works”
It’s:
• Code meets circuits
• Logic meets noise
• Ideas meet constraints
And that’s where most people get stuck.
It's not because they’re not smart, but because no one taught them how things actually connect.
So they stay here:
→ Copying code
→ Guessing fixes
→ Hoping things work
That’s not engineering.
That’s trial and error.
At YFE, we’re building something different.
We’re training engineers who understand:
• Why systems fail
• How sensors, power, and timing behave
• How software becomes physical action
• How real devices are actually designed
Embedded systems isn’t just a skill.
It’s the bridge between software and reality.
And once that clicks:
• You stop guessing.
• You stop copying.
• You start building with intent.
If you’ve ever felt like:
“I can code, but I don’t really understand systems.”
You’re not alone.
That gap is exactly what we’re fixing.
Not with more tutorials.
But with real system thinking.
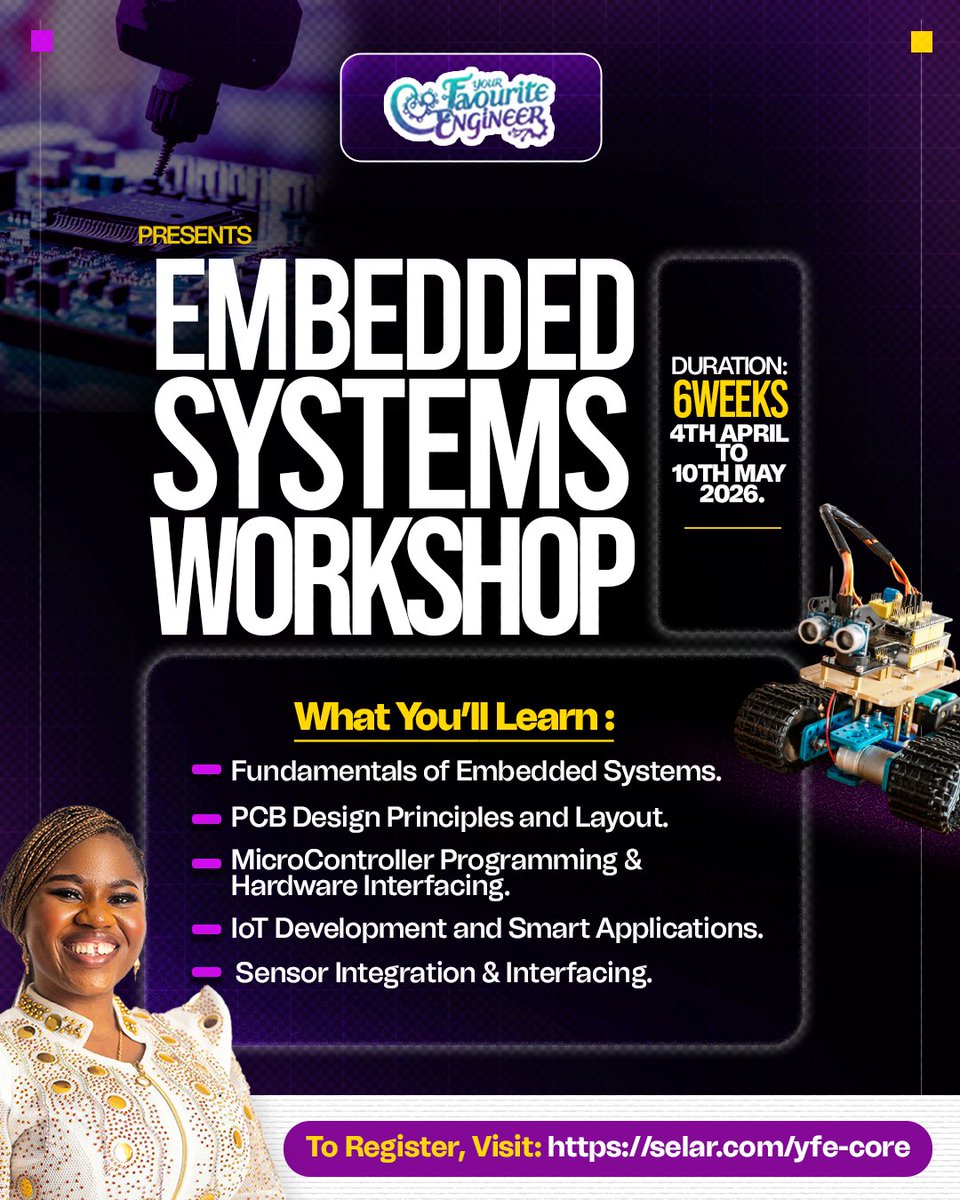
Sign up for our Embedded Systems Workshop
🔗 selar.com/yfe-core
Now let’s build! 🦾

1
2
18
695
𝐂𝐨𝐧𝐭𝐫𝐨𝐥 𝐄𝐧𝐠𝐢𝐧𝐞𝐞𝐫𝐢𝐧𝐠: 𝐓𝐡𝐞 𝐃𝐢𝐬𝐜𝐢𝐩𝐥𝐢𝐧𝐞 𝐓𝐡𝐚𝐭 𝐊𝐞𝐞𝐩𝐬 𝐒𝐲𝐬𝐭𝐞𝐦𝐬 𝐒𝐭𝐚𝐛𝐥𝐞
A motor spinning at the correct speed.
A drone maintaining altitude despite wind disturbances.
A robotic arm stopping precisely at its target position.
A temperature control system holding a process at exactly 200°C.
None of these happen by accident.
They occur because a control system continuously measures, compares, calculates, and corrects.
At the center of many of these systems sits one of the most widely used algorithms in engineering:
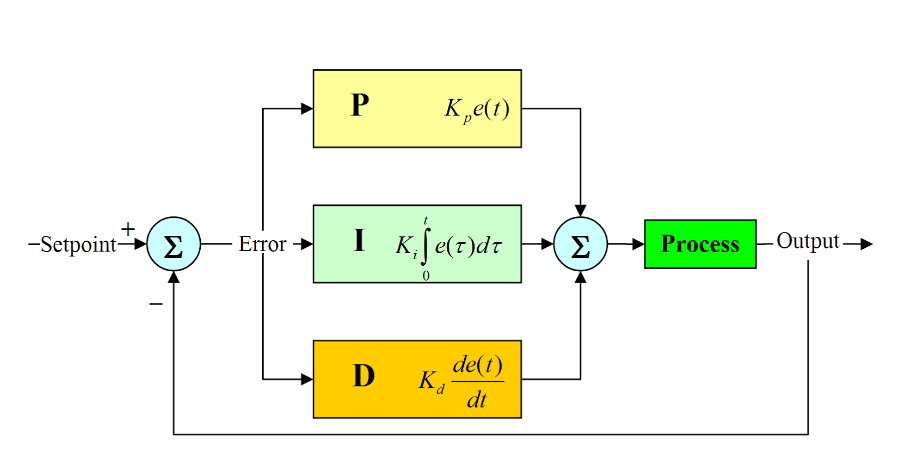
𝐓𝐡𝐞 𝐏𝐈𝐃 𝐂𝐨𝐧𝐭𝐫𝐨𝐥𝐥𝐞𝐫
PID stands for:
• Proportional (P)
• Integral (I)
• Derivative (D)
Its purpose is simple:
Keep a system's output as close as possible to a desired value, known as the setpoint.
The challenge is that real systems are never perfect.
Motors experience load changes.
Drones encounter turbulence.
Industrial processes face disturbances.
Sensors introduce noise.
A controller must continuously respond to these changes while maintaining stability.
The 𝐏𝐫𝐨𝐩𝐨𝐫𝐭𝐢𝐨𝐧𝐚𝐥 term reacts to the current error between the measured output and the setpoint. Larger errors result in larger corrective actions.
The 𝐈𝐧𝐭𝐞𝐠𝐫𝐚𝐥 term accumulates error over time. This helps eliminate steady-state error, so a system can eventually settle exactly at its target rather than remaining slightly above or below it.
The 𝐃𝐞𝐫𝐢𝐯𝐚𝐭𝐢𝐯𝐞 term evaluates how quickly the error changes.
This allows the controller to anticipate system behavior and reduce overshoot before it occurs.
Together, these three actions create a controller capable of delivering fast response, high accuracy, and stable operation.
The challenge, however, is not implementing a PID controller.
The challenge is tuning one.
Increase proportional gain too much, and the system oscillates.
Increase integral gain excessively and instability begins to appear.
Increase derivative gain too aggressively and measurement noise becomes amplified.
Finding the right balance is where control engineering becomes both an art and a science.
This is why PID controllers continue to dominate industries decades after their introduction.
From robotics and aerospace to manufacturing, automotive systems, and process control, they remain one of the most practical solutions for regulating dynamic systems.
The next time you see a drone hovering steadily, a robotic arm moving precisely, or a motor maintaining speed under changing loads, remember:
Behind that stability is a controller making thousands of decisions every second.
And in many cases, that controller is a PID.
For the control engineers here: What was the first system you tuned, and what did it teach you about stability?
1
2
7
53
Jun 13
A debate came up recently in our community:
"If you're serious about Embedded Systems Engineering, stop using development boards and start working directly with the chips."
Interesting take.
It also raises a bigger question:
What actually makes someone an embedded engineer?
Is it using an STM32 instead of an Arduino?
Designing custom PCBs?
Writing bare-metal code?
Working directly with registers?
We've been thinking about it, and we believe the conversation is really about abstraction.
Most engineers start somewhere.
For many of us, it was an Arduino.
Blinking LEDs.
Reading sensors.
Building simple projects.
Then the questions start showing up.
What is happening underneath the library?
How does the UART peripheral actually work?
What happens when an interrupt fires?
Why does DMA exist?
How is memory organized?
Why does timing matter?
That's where the real journey begins.
Embedded Systems Engineering isn't defined by the board on your desk.
It's defined by how deeply you understand the system you're building.
A robotics engineer working on control systems is solving embedded problems.
A firmware engineer developing drivers is solving embedded problems.
An engineer designing a custom STM32 board is solving embedded problems.
Different layers.
Different challenges.
Same field.
The engineers who grow the fastest usually aren't chasing a specific board.
They're constantly removing layers of abstraction and learning what sits underneath.
Datasheets.
Reference manuals.
Communication buses.
Memory maps.
Interrupts.
Power systems.
System architecture.
That's where understanding compounds.
The goal isn't to stop using development boards.
The goal is to keep going deeper.
Curious to hear from other engineers:
What was the first concept that made you realize embedded systems was much bigger than programming a microcontroller?
1
7
15
238
YFE Embedded retweeted
Jun 8
Introducing YFE Embedded's First Set of Interns!
During our Embedded Systems Workshop, these engineers stood out, showed promise, and will now be joining the YFE workforce.
Congratulations and welcome aboard:
🔹 Shawn Ebubechukwu Nsorah (@ShawnQuestt)
🔹 Oyindamola Deji-Agboola (@OmotoyosiAgboo2)
🔹 Ajisafe Mosimiloluwa (@vx_simi)
We'll build a better Africa together 🤝🏽🔥

7
10
30
1,935
YFE Embedded retweeted

Jun 9
80
8
22
1,734
YFE Embedded retweeted

I joined an 𝕏 Space this weekend, and in it, Sir Roberts @iamKingRobert), Founder of Geek Circle (@thegeekcircleX), emphasized the importance of companies incorporating internship programs into their structure
It will allow more students to learn, grow, and shape their mindsets to become industry-ready and world-class
Through these programs, they gain exposure and access to opportunities they wouldn't have gotten otherwise
I've been shying away from it for a while, but I finally decided to take it up
Now, YFE Embedded has recruited her first set of interns
And this is just a stepping stone to greater things at the organization
The future of hardware engineering is getting brighter by the day
Congratulations to all those who made it on board!
We'll build a greater Africa together 🤝🏽🔥
Jun 8

Introducing YFE Embedded's First Set of Interns!
During our Embedded Systems Workshop, these engineers stood out, showed promise, and will now be joining the YFE workforce.
Congratulations and welcome aboard:
🔹 Shawn Ebubechukwu Nsorah (@ShawnQuestt)
🔹 Oyindamola Deji-Agboola (@OmotoyosiAgboo2)
🔹 Ajisafe Mosimiloluwa (@vx_simi)
We'll build a better Africa together 🤝🏽🔥
4
4
26
710
Jun 9
What if the mistakes you're making in robotics right now are the exact same ones every beginner makes?
And what if someone who's already been through it was willing to sit down and walk you through each one?
That's exactly what we're doing tonight.
Over the past few weeks at YFE & Aurora (@aurora_robots ), we've been in the trenches with our community — teaching, listening, and having real conversations about what it actually takes to grow as a hardware engineer.
And one thing we keep hearing?
People don't just want theory.
They want to learn from experience.
From someone who has made the mistakes, figured out what went wrong, and come out the other side with clarity.
Tonight, we'll have Bakel Bakel (@ThatRoboticsDev) to do exactly that.
He'll be walking us through the most common mistakes beginners make in Robotics.
And more importantly, how to avoid them before they cost you time, money, and frustration.
This is the kind of session that shortens your learning curve significantly.
The kind we wish existed when we were starting out.
Tonight, 8p.m. WAT (UTC 1) 📌
Click the link to set your reminder
🔗 x.com/i/spaces/1PJqrrznoAexb
Invite a friend who needs to hear this
See you soon 🩵💚
1
3
10
295
YFE Embedded retweeted
Jun 5
Did you know that YFE Embedded has an engineering community?
We've built a growing network of students, embedded engineers, enthusiasts, researchers, and industry professionals who are passionate about solving real-world problems through hardware and intelligent systems.
Inside the community, members:
• Discuss emerging trends in Embedded Systems, Edge AI, and Industrial Technology
• Get feedback on projects and technical ideas
• Learn from experienced engineers and builders
• Collaborate with like-minded individuals across different engineering disciplines
• Ask questions, share insights, and grow through meaningful technical conversations
Whether you're building your first embedded project or architecting complex systems, surrounding yourself with the right people can accelerate your growth significantly.
Engineering has always been a team sport.
The best ideas are refined through discussion.
The best systems are built through collaboration.
The best engineers never stop learning.
If you're passionate about hardware, embedded systems, and the future of engineering, we'd love to have you join us.
Join the community via the link below
🔗 forms.gle/UnxdrLtKjc4Ckk8e8
Let's build the future — one system, one engineer, and one conversation at a time.
1
2
11
279
YFE Embedded retweeted

Jun 5
Raaa!! 🔥🔥
Much obliged, P
Thy royal knight is honoured 🐉⚜️

Oh yeah. And before I forget (again 😗), shout-out to our best students 😁
@ShawnQuestt
@McGarrettsO
@Xander_danny229
And @Tosin_afolabi09, our lecturer wey no guide 😂




1
4
6
215
YFE Embedded retweeted

Jun 5
Ohhhhh i am blushingg🥰🥰🥰🥰🥰🥰🥳🥳🥳🥳🥳🥳🥳😊😊😊😊😊😊.
More great achievements to @yfe_embedded
And last, but most certainly not the least, our Fantastic Nevo 🥹
@nevo_design
Your own will not spoil ✊🏽🔥

2
3
5
152
YFE Embedded retweeted
For 8 weeks, YFE Embedded (@yfe_embedded) trained 13 engineers on Embedded Systems
We wrapped up this Sunday, and it has to be the most wholesome feelings ever 🥹
This was the first workshop we've ever had
People worked with Microcontrollers for the first time
Our participants built projects, worked with sensors
They also got the chance to THINK LIKE ENGINEERS through class exercises and assignments
It's an experience I won't forget
Our next cohort kicks off in August, so get ready 'cause this one will be for 3 months
12 weeks
Tougher exercises
Deeper applications
More building! 🦾💥
The flier will be out soon
I'm still your embedded systems queen on this space 😌👑
For more, follow me and turn on the notification bell 🔔 on my page

5
4
36
570
YFE Embedded retweeted
Oh yeah. And before I forget (again 😗), shout-out to our best students 😁
@ShawnQuestt
@McGarrettsO
@Xander_danny229
And @Tosin_afolabi09, our lecturer wey no guide 😂
2
1
5
388
YFE Embedded retweeted
And last, but most certainly not the least, our Fantastic Nevo 🥹
@nevo_design
Your own will not spoil ✊🏽🔥
1
11
312
Jun 2
Over the past few weeks, Silicon & Systems has taken us down some interesting roads.
We started with emerging trends in Embedded Systems and Robotics.
Then we explored:
• Edge Computing
• Edge AI
• IT vs OT (Information Technology vs Operational Technology)
• How modern intelligent systems are changing industries
We even opened the floor completely during our Town Hall Edition.
No presentations.
No slides.
Just engineers, students, builders, and curious minds asking questions, sharing experiences, and helping each other find clarity.
Then last week's conversation took a turn none of us expected 😅
There were laughs.
There was banter.
There were honest conversations about the current state of the nation.
But somewhere in the middle of all of that, something important happened.
People started discussing solutions.
Not just problems.
Ideas.
Initiatives.
Ways engineers can contribute meaningfully to the challenges around us.
It reminded us that engineering has always been bigger than circuits, code, and hardware.
Engineering is ultimately about solving problems.
Which brings us to today's conversation.
Because every smart device, every industrial machine, every automated system depends on one thing:
Communication.
Data has to move.
Sensors have to talk.
Controllers have to respond.
Machines have to coordinate.
And none of that happens by accident.
Today, we'll be exploring:
⚡ How Data Travels in Industrial Systems ⚡
We'll break down:
• Industrial communication protocols
• How machines exchange information
• Why protocol selection matters
• Where technologies like CAN, Modbus, Ethernet/IP, and others fit into modern systems
If you've enjoyed any of our previous conversations, you're going to love this one.
Join today @ 8p.m. WAT (UTC 1) 📌
Bring your questions.
Bring your curiosity.
And if you're serious about understanding how modern systems actually work beneath the surface, this is one conversation you don't want to miss.
Click the link below and set a reminder
🔗 x.com/i/spaces/1dxYllLkBoAJX
See you then ✨
1
1
4
151
Jun 1
A lot of engineering students are struggling to get internships.
And the frustrating part?
Many of them are doing everything they know how.
Sending applications.
Updating their CVs.
Asking around.
Yet nothing happens.
A few months ago, we started noticing the same pattern inside our community.
Students kept asking:
"Where do I even apply?"
"How do I write a CV that recruiters will actually read?"
"How do I stand out when I have little or no experience?"
And honestly, these are fair questions.
Nobody teaches you how to navigate the industry.
Most people are expected to figure it out themselves.
The result?
Talented students miss opportunities they were fully capable of getting.
That's exactly why we created the YFE Internship Resource Kit.
Not another motivational PDF.
Not another generic checklist.
A practical resource designed to help engineering students move from confusion to action.
Inside, you'll find:
✅ An ATS-optimized resume template
✅ A professional resume template for remote and international opportunities
✅ A directory of companies with locations and contact information
✅ The YFE Ultimate Internship Playbook — a step-by-step guide on how to maximize your internship experience, build valuable relationships, and position yourself for future opportunities
Because getting the internship is only half the battle.
What you do during that internship can shape your career for years.
The engineers who stand out aren't always the smartest in the room.
They're often the ones who prepare better.
The ones who understand how industry works.
The ones who know how to create opportunities instead of waiting for them.
If you're an engineering student preparing for SIWES, IT, industrial training, or even remote opportunities, this resource was built for you.
A new month is a good time to start moving differently.
More intentional.
More prepared.
More industry-ready.
The opportunities are out there.
Make sure you're ready when they arrive.
Get access here
🔗 bit.ly/3QUm0zp
1
3
8
199
May 26
Many engineering students are carrying questions they rarely get the chance to ask openly.
That's one thing we've realized.
They aren't technical questions alone.
They're real questions.
Questions about growth.
Direction.
Consistency.
Confidence.
What it actually means to become an engineer beyond passing exams.
And the truth is, many people are trying to navigate engineering quietly on their own.
Trying to figure out:
• Where to start
• What skills matter
• How to build projects
• How to stay motivated
• How to balance learning with life
That isolation is more common than people think.
Over the past few months, Silicon & Systems has slowly become a space where those conversations can happen honestly.
Not polished.
Not performative.
Just engineers learning from other engineers.
Some people join to learn about embedded systems.
Some come for robotics.
Some are curious about Edge AI or industrial technology.
But somewhere in the middle of those technical conversations, something else has been happening:
People have been finding clarity.
And that matters.
Engineering grows faster in environments where people feel comfortable asking questions, sharing experiences, and learning publicly without fear of looking inexperienced.
That is the energy behind today’s session.
Silicon & Systems, Town Hall Edition 🩵💚
No rigid structure.
No pressure to “sound smart.”
Just open conversations around:
• Engineering growth
• Career direction
• Building projects
• Consistency
• Learning challenges
• Navigating the industry
If you’ve been looking for a space to ask questions, connect with people who genuinely care about engineering, and grow alongside others on a similar journey, this session is for you.
Join us today @ 8pm WAT (UTC 1) 📌
Click on the link to set a reminder
🔗 lnkd.in/dDM5QT8g
The future of engineering will not only be shaped by brilliant individuals.
It will also be shaped by strong communities that learn and build together! 🤝🏽🔥
1
1
5
156