
Advanced Mechanical Bipedal Experimental Robotics Laboratory @Caltech specializes in design and control of bipedal and humanoid robots.
Joined October 2010
- Tweets 271
- Following 114
- Followers 1,516
- Likes 212
135 Photos and videos












4 Nov 2024
New work from the lab on robust sim2real transfer of multifinger grasps using the strategy of grasp evaluation being presented at #Corl2024!
We're releasing a dataset of 3.5M labeled grasps with corresponding perceptual data - see the 🧵 from @albert_h_li below for details!
4 Nov 2024

There have been many recent big grasping datasets, but few demos of real-world grasping using generative models. How do we achieve this?
Introducing: Get a Grip (#corl2024)!
We show that instead of generative models, discriminative models can attain sim2real transfer!
👀🧵👇
2
804
10 Oct 2024
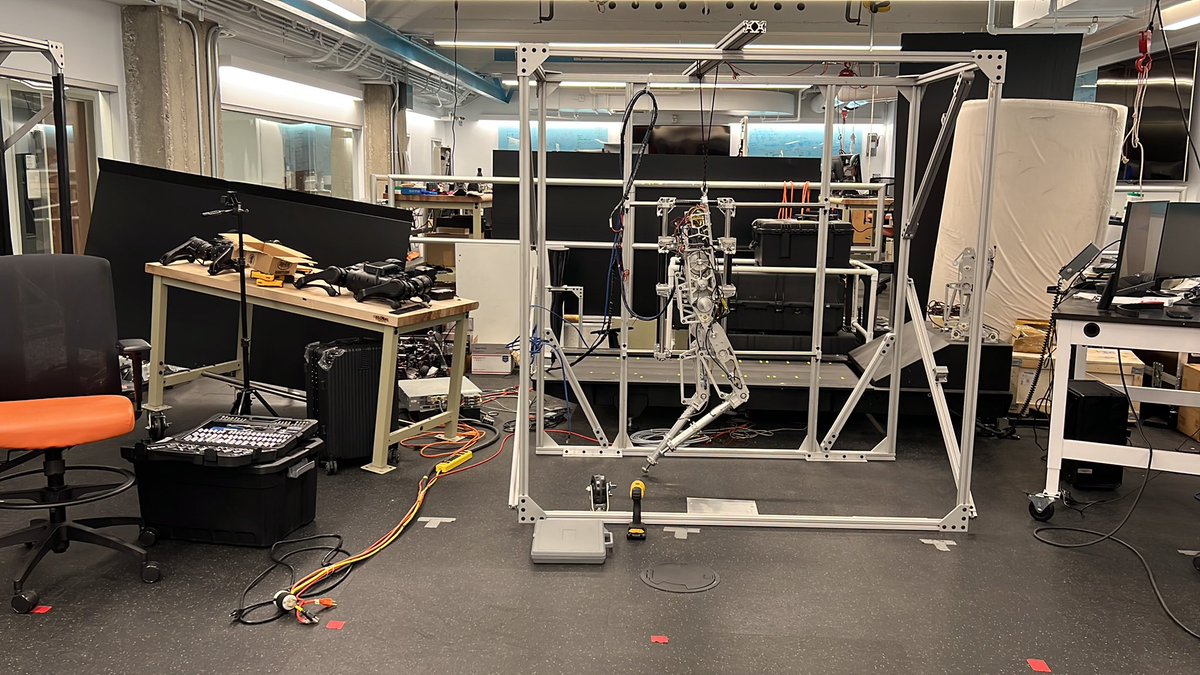
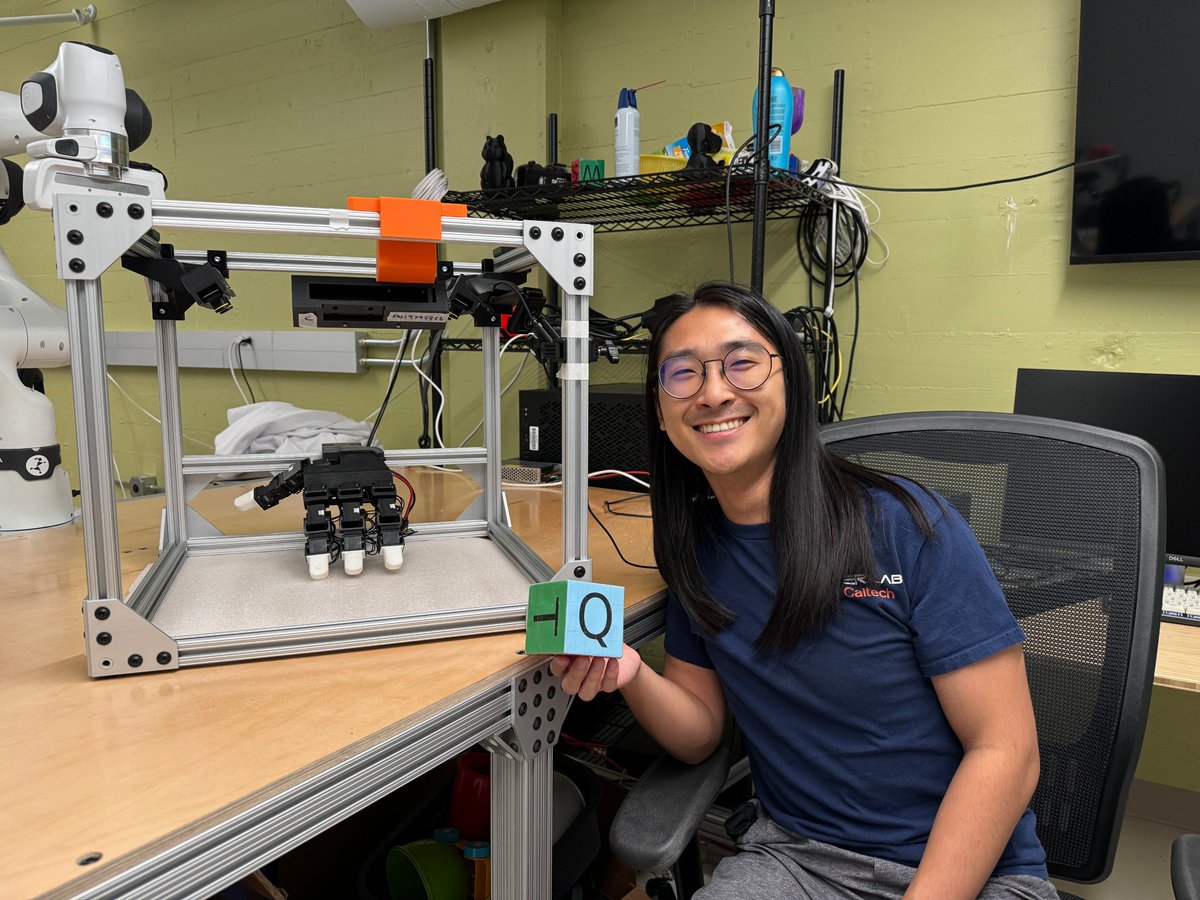
Awesome new work from our lab member @albert_h_li! Sampling-based control strategies like CEM alone are viable for contact-rich tasks like in-hand cube reorientation in the real world (no reinforcement learning 🤯).
For more details, check the thread below👇
10 Oct 2024
Excited to share our new📰, DROP: Dexterous Reorientation via Online Planning!
Overview:
🔹We tackle cube rotation🧊♻️on hardware
🔹DROP is the first 🧊♻️sampling-based MPC demo. No reinforcement learning!
🔹Median 30.5 rotations w/o dropping, max of 81👑🦾
See 🧵below👇
1
1
8
895
10 Oct 2024
Open-source code website here: x.com/albert_h_li/status/184…
10 Oct 2024
It was wonderful to work with Preston Culbertson (@pdculbert), Vince Kurtz, and my advisor, Aaron Ames🤝
🖥️Project website: caltech-amber.github.io/drop
📰Paper: arxiv.org/abs/2409.14562
🧑💻Code: github.com/Caltech-AMBER/dro…
🛠️Open-source hardware setup coming soon!
2
429
AMBER Lab retweeted

10 Oct 2024
I'm so excited to announce I will be joining @Cornell_CS as an assistant professor next fall!
I can't wait to launch my lab and start building robots with human-level dexterity and adaptability. 🤖🏃🤹
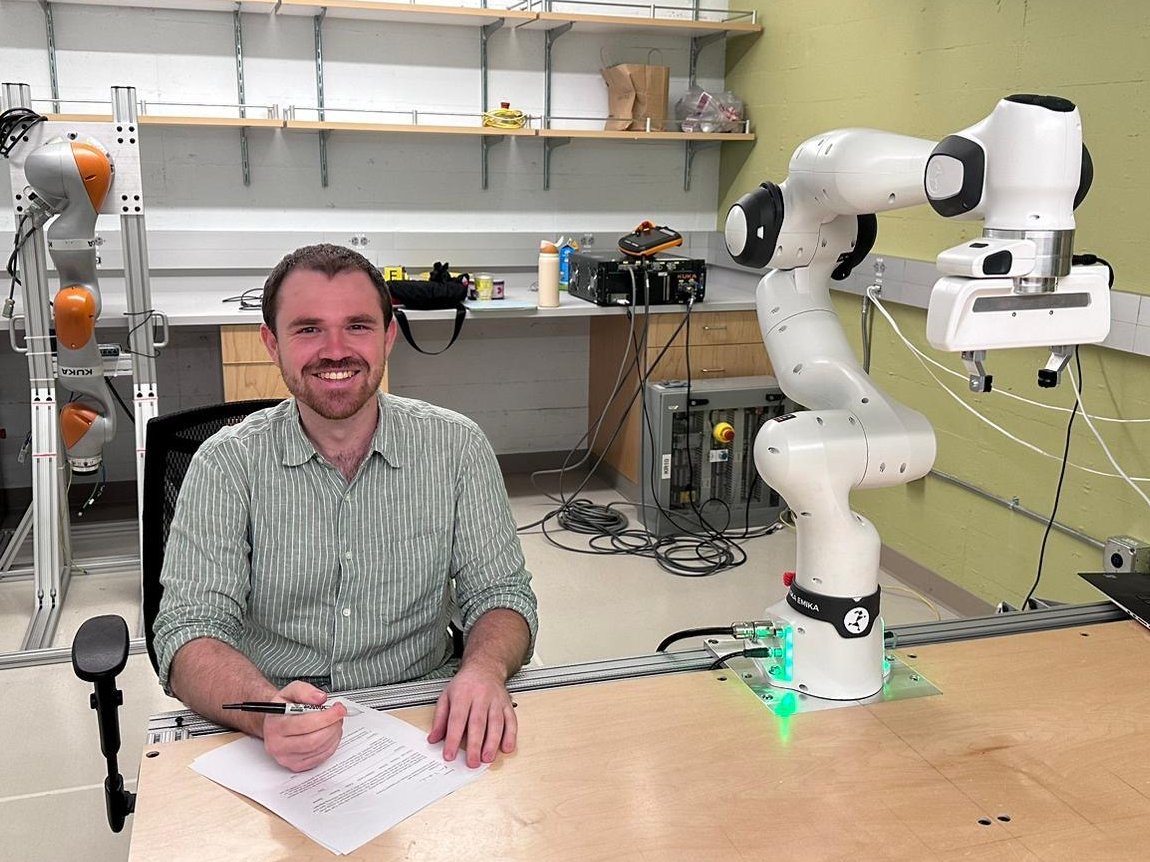
ALT Preston sitting at a table with two robots, signing their offer letter from @Cornell_CS.
5
2
41
2,144
AMBER Lab retweeted

15 Jun 2023
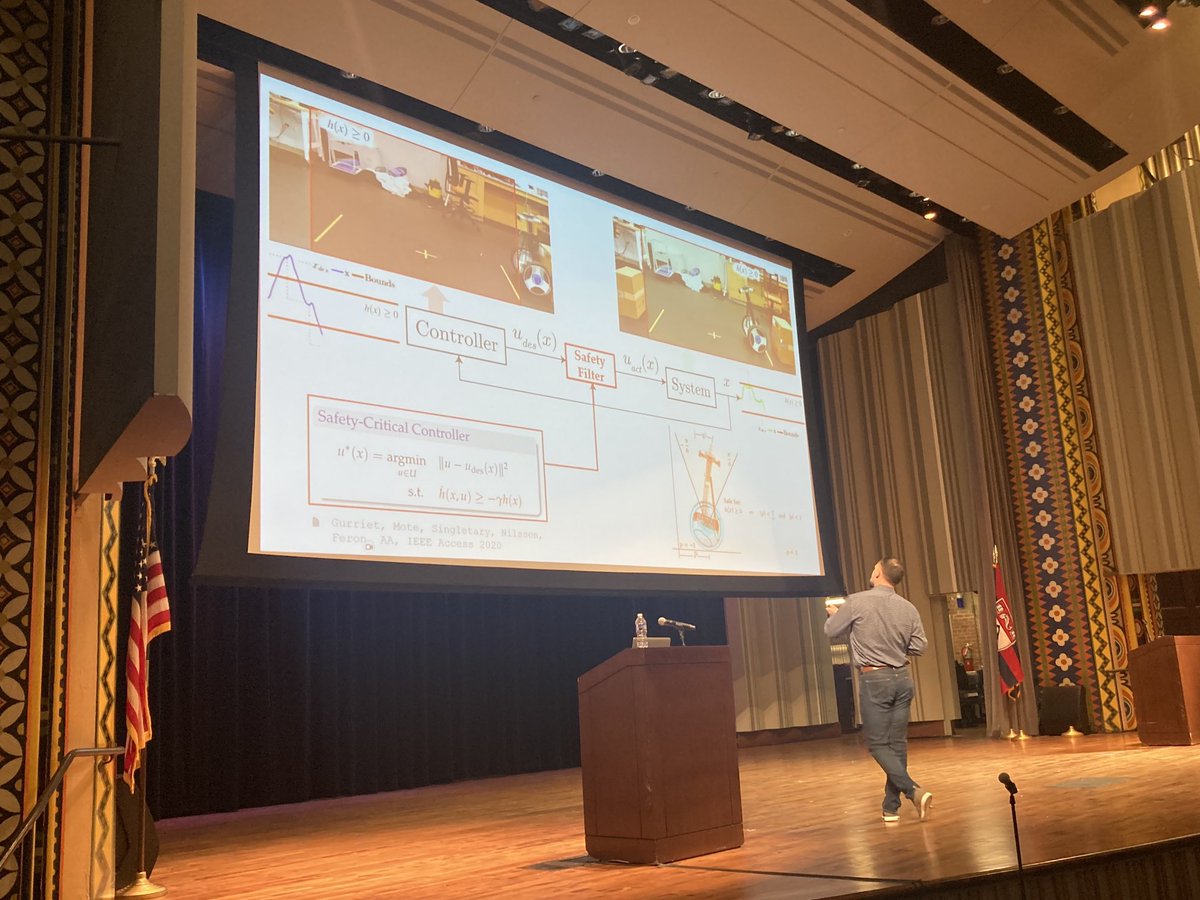
Asimov really meant control barrier functions when he defined the first law of robotics.@AMBER_lab
2
20
3,310
AMBER Lab retweeted

15 Jun 2023
So so honored to have received the “Best Thesis in MCE” award this year! Huge shoutout to all my collaborators 🎉🎓💯 @AMBER_lab @yisongyue

5
38
4,001
6 Jun 2023
ICRA was an eventful conference for the AMBER lab this year with a total of 3 best paper awards! See 🧵for details…
3
28
2,996
6 Jun 2023
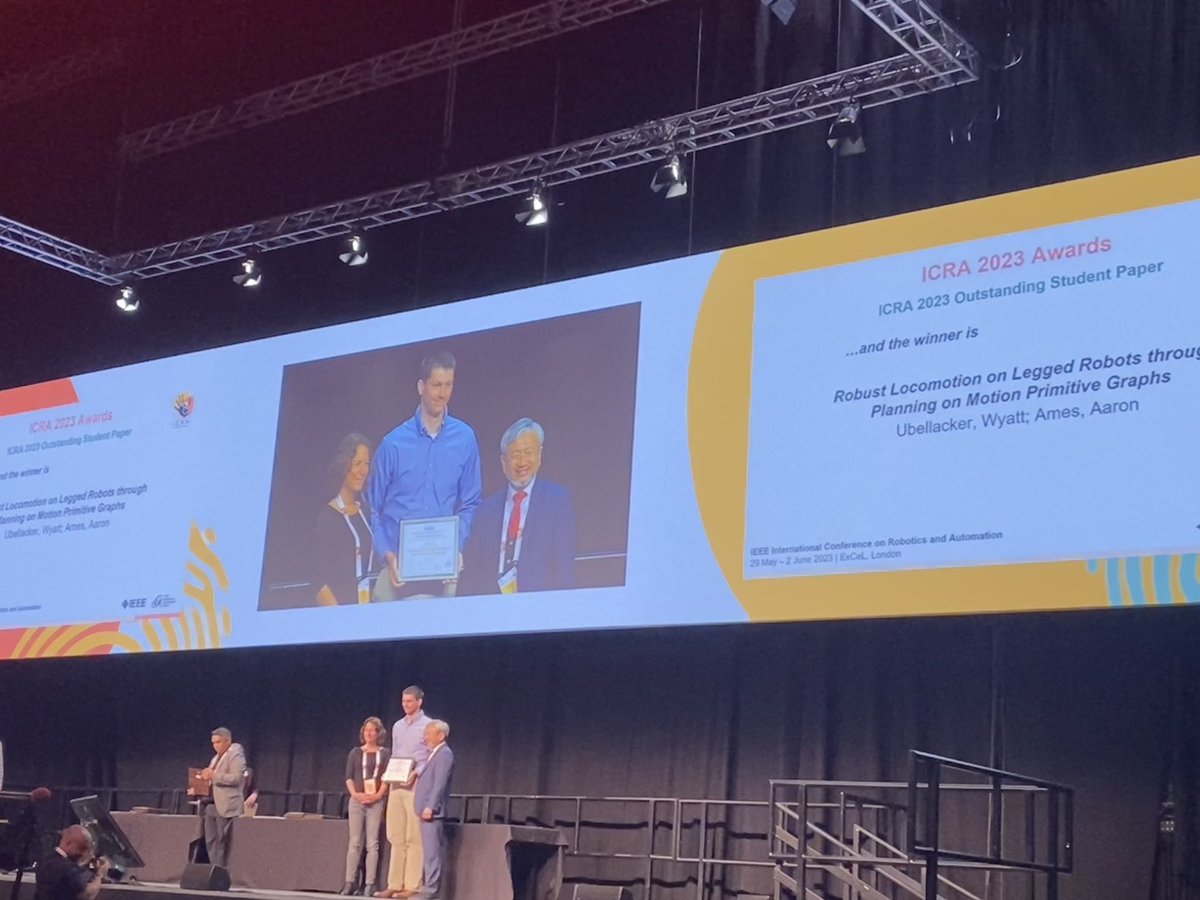
AMBER lab graduate students Wyatt and Noel took home the “Outstanding Student Paper” and “Outstanding Dynamics and Control Paper” awards, respectively, for their work on planning through motion primitive graphs and MPC for 3D hopping

1
11
856
6 Jun 2023
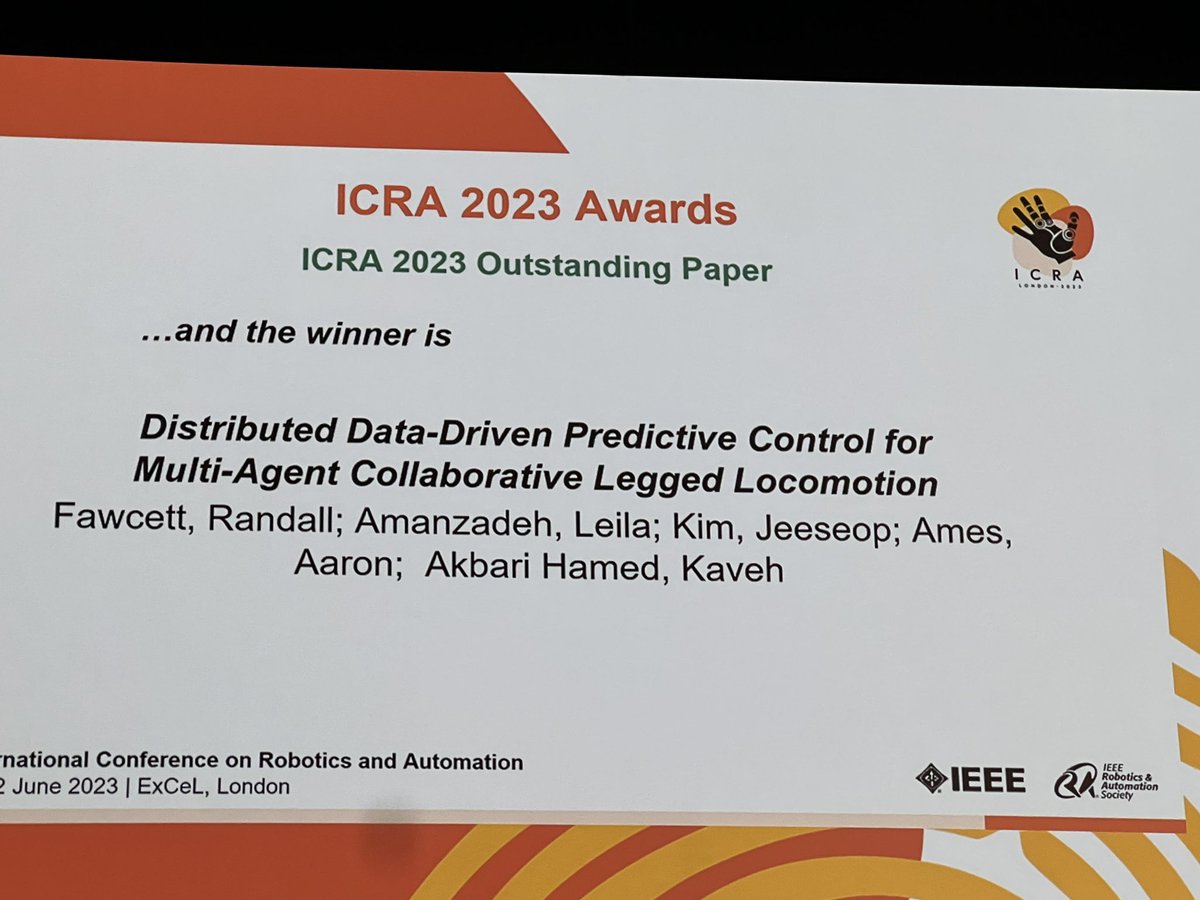
And AMBER lab post-doc Jeeseop took home the “Outstanding Paper” award for work that he did during his PhD (with Randy, Leila, and Kaveh) on multi-agent collaboration. Congrats to all!!
1
8
906
AMBER Lab retweeted

2 Jun 2023
I am so happy to share that our paper entitled ``Distributed data-driven predictive control for multi-agent collaborative legged locomotion" by my Ph.D. students R. Fawcett, L. Amanzadeh, and J. Kim, in collaboration with Dr. A. Ames (@AMBER_lab), has been selected as the outstanding paper of the 2023 IEEE International Conference on Robotics and Automation (#ICRA2023).
arxiv.org/abs/2211.06917
3
11
81
6,379
AMBER Lab retweeted

4 Apr 2023
Excited to share our review paper that just came out on control methods for lower-limb powered prostheses!
@maegan_tucker1 @AMBER_lab @GT_EPIC_Lab
authors.elsevier.com/a/1gsBM…
9
21
2,529
AMBER Lab retweeted
3 Apr 2023
So happy to share our survey paper on state-of-the-art control techniques for lower-limb powered prostheses!!
authors.elsevier.com/c/1gsBM…
@RachelGehlhar @AMBER_lab @GT_EPIC_Lab
1
7
15
3,144
AMBER Lab retweeted
1 Mar 2023
Looking forward to giving a seminar at the University of Minnesota today! I'm excited to join the Mechanical Engineering faculty here in Spring 2024. @UMNME @UMNCSE cse.umn.edu/me/events/depart…
2
2
11
2,763
AMBER Lab retweeted
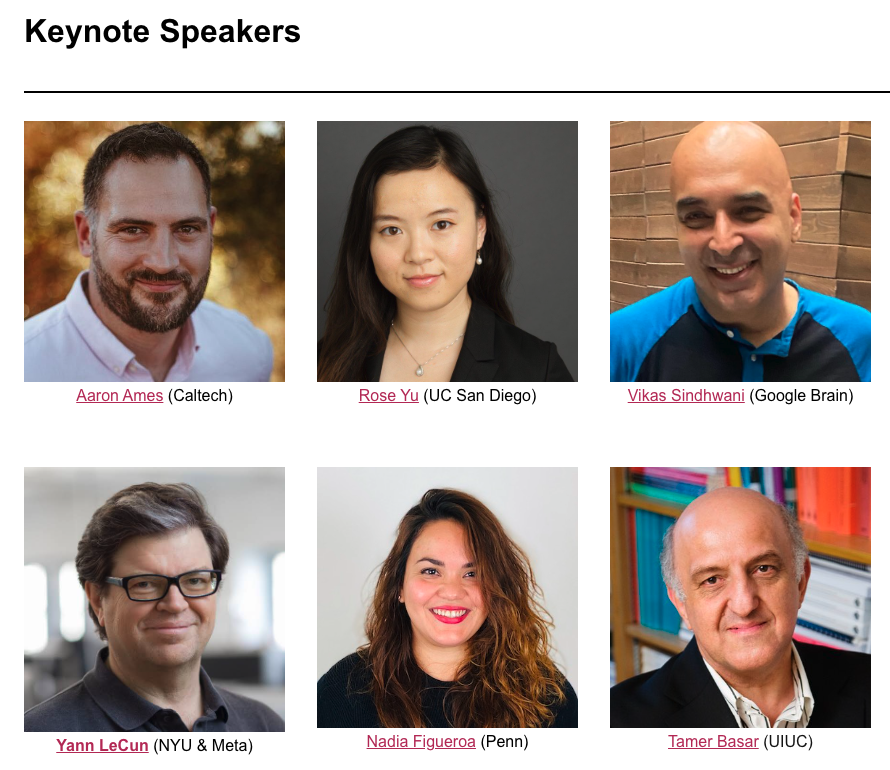
27 Jan 2023
Thrilled to announce our 🔥 Keynote Speakers 🔥 for L4DC 2023: @ylecun @yuqirose @robo_kween @vikassindhwani Aaron Ames (@AMBER_lab) and Tamer Başar!
l4dc.seas.upenn.edu/
11
91
51,128
AMBER Lab retweeted
12 Dec 2022
Today I officially signed an offer to become an Assistant Professor at the Georgia Institute of Technology starting January 2024!!! I will be joining both the @GeorgiaTech_ECE and @MEGeorgiaTech departments. @gatechengineers @GeorgiaTech
69
27
1,549
28 Oct 2022
We had such a blast hosting the FTC Team 25 Rock N’ Roll Robots — a local all-girls robotics team! Can’t wait to see what you all accomplish this year!🤖💪🏼💁🏻♀️
@maegan_tucker1 @RachelGehlhar @noel_c_s

1
6
6 Oct 2022
We’ve been loving having some of the Wandercraft team here at Caltech! Stay tuned for some new exo videos @ExoWandercraft
1
1
15
8 Oct 2022
Most exciting is the new “active mode”! Any guesses on what sensors were measuring from (underneath the colored wrap on the subjects legs)?
1
9

AMBER Lab retweeted

2 Sep 2022
That feeling when you bike around campus with roughly your annual salary in your backpack 😅
Huge thank you to @AMBER_lab, @amykjli & @maegan_tucker1 for letting us demo their hardware!!
Bonus for any one who can tell me what these beauties are 🤓😍😃

3
1
11