
15 Photos and videos








Pinned Tweet

2 Mar 2024
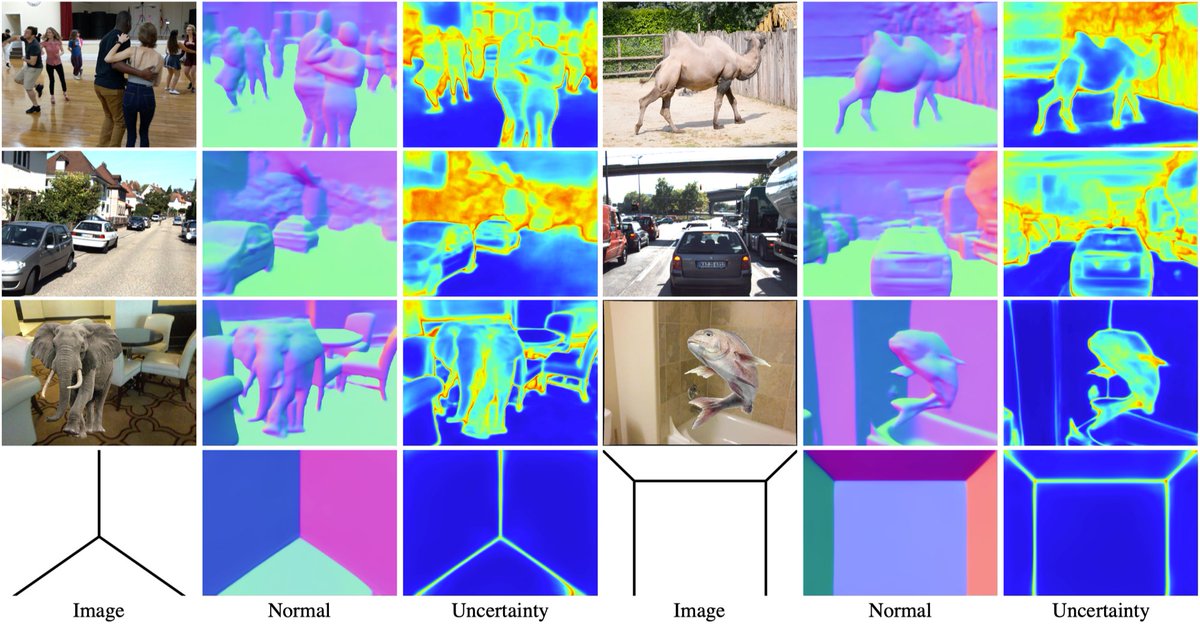
Excited to introduce 𝗗𝗦𝗜𝗡𝗘! (#CVPR2024)
baegwangbin.github.io/DSINE/
We push the limits of single-image surface normal estimation by rethinking the inductive biases needed for the task.
See you in Seattle!
7
114
642
56,373

Try Tesla Robotaxi in Dallas & Houston!

5,443
10,332
82,160
24,993,139
Gwangbin Bae retweeted

Mar 5
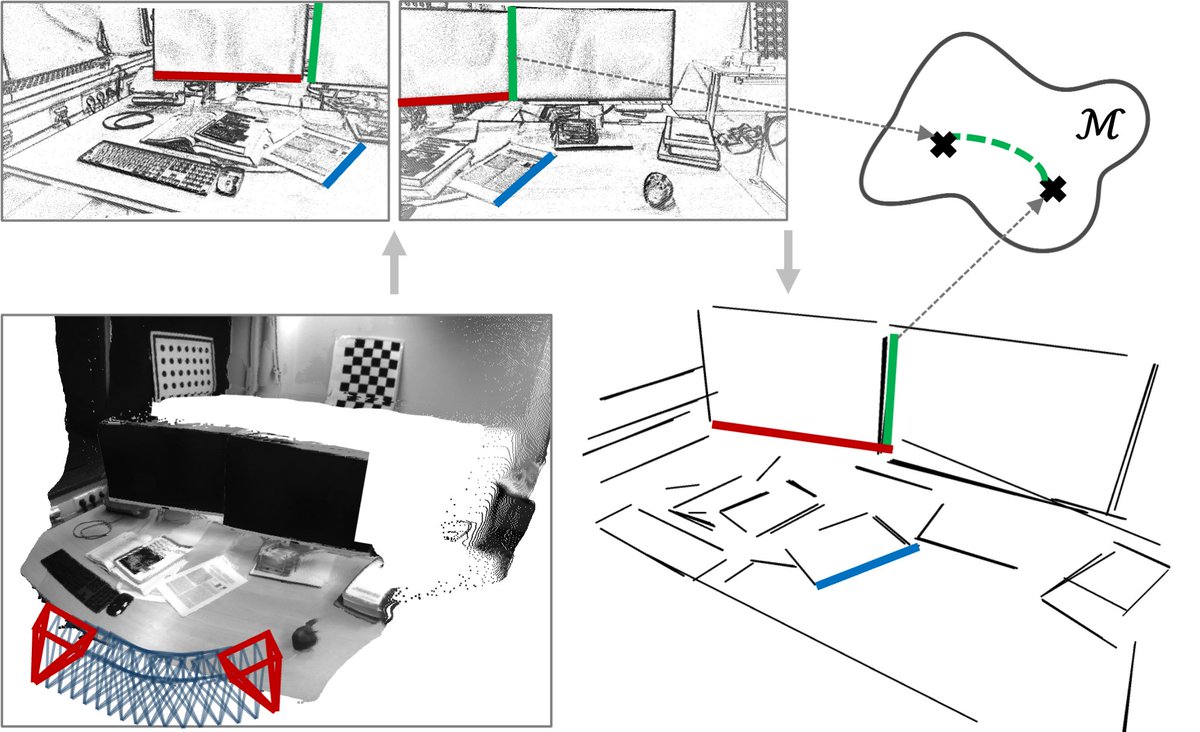
Excited to introduce RoEL, accepted to T-RO!
❓ What 3D representation to use for event-based reconstruction?
💡 Event cameras capture edges; we reconstruct them as 𝟑𝐃 𝐥𝐢𝐧𝐞𝐬.
We present a robust pipeline: from reliable correspondence search to Grassmannian optimization.
1
1
3
162
Just started Tesla Robotaxi drives in Austin with no safety monitor in the car.
Congrats to the @Tesla_AI team!
If you’re interested in solving real-world AI, which is likely to lead to AGI imo, join Tesla AI. Solving real-world AI for Optimus will be 100X harder than cars.

3,876
8,922
69,718
8,959,151




Gwangbin Bae retweeted

28 May 2025
Visual SLAM has made major success in static scenes — now let’s explore the dynamic world we live in!
At #CVPR2025, we introduce 4DTAM, 4D Tracking & Mapping using dynamic surface Gaussians optimized through diff. rendering.
muskie82.github.io/4dtam/
w/ @BaeGwangbin @AjdDavison
8
55
317
32,070
Gwangbin Bae retweeted

16 Dec 2024
Introducing MASt3R-SLAM, the first real-time monocular dense SLAM with MASt3R as a foundation.
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @eric_dexheimer*, @AjdDavison (*Equal Contribution)
42
253
1,433
203,565
Gwangbin Bae retweeted

25 Sep 2024
COMO will be presented as an 𝐨𝐫𝐚𝐥 at #ECCV2024!
Also come see the 𝐥𝐢𝐯𝐞 𝐝𝐞𝐦𝐨 of our compact 3D representation for real-time monocular SLAM
Oral: Session 2C at 1:40 PM on Tue 1 Oct
Poster: #181 at 4:30-6:30 PM on Tue 1 Oct
Demo: Thurs 3 Oct AM
edexheim.github.io/como/
3 Apr 2024

How can we infer 3D-consistent poses and dense geometry in real-time given only RGB images?
𝗖𝗢𝗠𝗢 decodes dense geometry from a compact and optimizable set of 3D anchor points to enforce 3D consistency.
Project page: edexheim.github.io/como/
Work with @AjdDavison
1/n
18
106
11,213
19 Jul 2024
First time giving a talk at BMVA Computer Vision Summer School. It was great meeting students and exchanging ideas!
19 Jul 2024

Dr Gwangbin Bae @BaeGwangbin delivered on a talk on "Always-on Perception for 3D Computer Vision" in the 27th BMVA Computer Vision Summer School in Durham University.

1
5
42
2,780
Gwangbin Bae retweeted

2 Jul 2024
Our lab's #SpatialAI demo guidelines:
1. Build demos (real-time good visualisations) *while* doing the actual research.
2. You learn more from 3 minutes with a live demo than any dataset results.
3. Show your demo to as many people as possible. Don't worry if it's not perfect.
2 Jul 2024

We won Best Demo at #CVPR2024 for Gaussian Splatting SLAM (@HideMatsu82 @rmurai0610). Also: Best Demo Honourable Mention for SuperPrimitives (@makezur @BaeGwangbin)! Proud of our whole group at @ICComputing. Demos make big impact, and are also fun! cvpr.thecvf.com/Conferences/…
3
10
103
16,830
23 Jun 2024
On my way to London after an unforgettable week at #CVPR2024. It was my first in-person CVPR and I loved every moment of it. A big thank you to everyone who came to my talk/poster!
1
2
51
5,325
Gwangbin Bae retweeted
21 Jun 2024
Reminder of the live demos of DSINE (real-time high quality normals) and SuperPrimitives (normals integrated into real-time monocular dense SLAM) in the demo session all day today at #CVPR2024.
14 Jun 2024

SuperPrimitives will be presented at #CVPR next week (Wednesday), along with a 𝗿𝗲𝗮𝗹-𝘁𝗶𝗺𝗲 𝗱𝗲𝗺𝗼 on Friday!
Our new representation enables dense monocular 3D reconstruction in real-time. No poses required!
Project page: makezur.github.io/SuperPrimi…
1
2
30
4,062
17 Jun 2024
𝗗𝗦𝗜𝗡𝗘 will be presented as an Oral at #CVPR2024!
Come to our talk - 𝗢𝗿𝗮𝗹𝘀 𝟯𝗔, 𝟵𝗔𝗠 𝗼𝗻 𝗧𝗵𝘂𝗿𝘀𝗱𝗮𝘆 - to hear about the motivation/insights behind this project and how surface normal cues can be incorporated in your research.
22
161
9,305
Gwangbin Bae retweeted

14 Jun 2024
SuperPrimitives will be presented at #CVPR next week (Wednesday), along with a 𝗿𝗲𝗮𝗹-𝘁𝗶𝗺𝗲 𝗱𝗲𝗺𝗼 on Friday!
Our new representation enables dense monocular 3D reconstruction in real-time. No poses required!
Project page: makezur.github.io/SuperPrimi…
3
42
208
30,797
24 Apr 2024
📢 Code release for 𝗗𝗦𝗜𝗡𝗘 (#CVPR2024 - Oral)
DSINE gives you surface normal prediction ( uncertainty) in real-time. We have released the code for training, testing, and running real-time demos. Try it yourself!
github.com/baegwangbin/DSINE
8
118
656
83,296
Gwangbin Bae retweeted
3 Apr 2024
How can we infer 3D-consistent poses and dense geometry in real-time given only RGB images?
𝗖𝗢𝗠𝗢 decodes dense geometry from a compact and optimizable set of 3D anchor points to enforce 3D consistency.
Project page: edexheim.github.io/como/
Work with @AjdDavison
1/n
3
54
265
41,784
5 Apr 2024
Finally released the code for 𝗨-𝗔𝗥𝗘-𝗠𝗘!
𝗨-𝗔𝗥𝗘-𝗠𝗘 estimates camera rotation in real-time by aligning the predicted surface normals to global principal directions.
Try our real-time demo with a webcam, or simply provide a link to a YouTube video.
5 Apr 2024

𝗖𝗼𝗱𝗲 𝗿𝗲𝗹𝗲𝗮𝘀𝗲 for U-ARE-ME !
Try it out yourself on any video:
github.com/callum-rhodes/U-A…
𝙎𝙚𝙚 𝙞𝙩 𝙡𝙞𝙫𝙚 𝙞𝙣 𝙖𝙘𝙩𝙞𝙤𝙣!
@DoC_Rhodes_ @BaeGwangbin @AjdDavison
1
15
70
6,774