
Research Scientist at NVIDIA. I train intelligent robot behaviors. Prev. CS Postdoc at Stanford, CS PhD at MIT.
Joined July 2011
- Tweets 725
- Following 723
- Followers 654
- Likes 215
170 Photos and videos













Pinned Tweet

5 Feb 2025
The ChatGPT of robotics needs both a model (GPT) AND an interaction method (“chat”) to let users steer robot policies online, post-training. The multimodality in diffusion models is great for capturing diverse behaviors, but users need control at inference time!
@felixwyw & team’s work at #ICRA2025 presents a method to steer pre-trained policies during generation. Check out yanweiw.github.io/itps/ for all the results!
3 Dec 2024

Want your robot to clean the kitchen your way? 🧹✨
🔗yanweiw.github.io/itps/"
Introducing Inference-Time Policy Steering: a training-free method that lets you specify where and how to manipulate objects, so you can guide non-interactive policies to align with your preferences!
1
1
7
1,165
Claudia D'Arpino 🤖🧠 retweeted

World-Action Models (WAMs) have become the second dominant recipe for robot foundation models, next to classical VLAs.
So where do they come from, and how do they compare vs VLAs?
I wrote an small overview of the WAM landscape, with some personal takes:
developer.nvidia.com/blog/pr…
4
6
112
Claudia D'Arpino 🤖🧠 retweeted

Apr 13
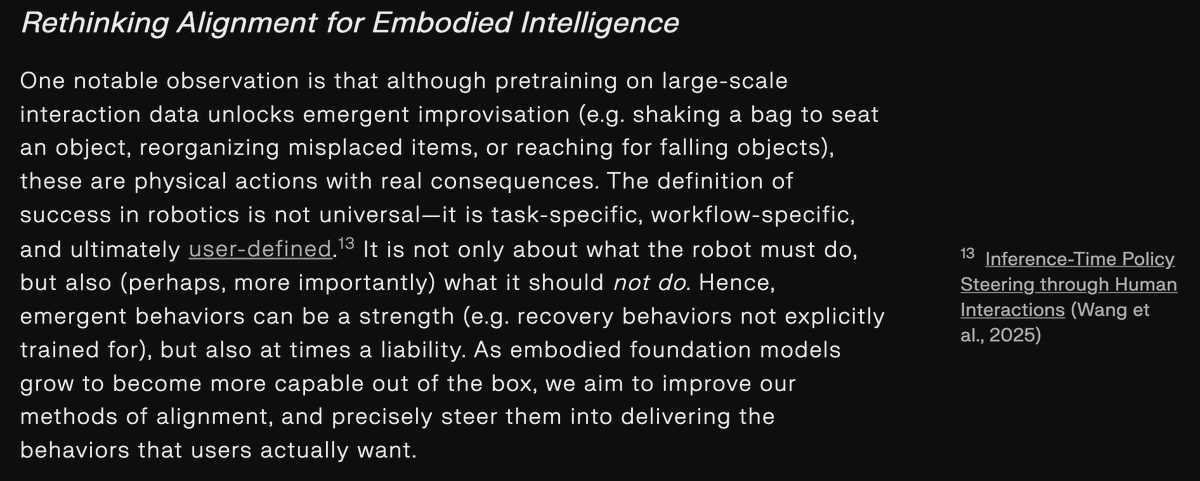
GEN-1 blog has a passage on alignment: pre-trained models often seem super eager, almost restless, to try many different motions. Steering them toward user preferences is what turns raw intelligence into useful execution.
Prediction: As we enter the pre-training era for robotics, we’ll see a lot more alignment and interpretability research on these mysterious models.
3 Dec 2024
Want your robot to clean the kitchen your way? 🧹✨
🔗yanweiw.github.io/itps/"
Introducing Inference-Time Policy Steering: a training-free method that lets you specify where and how to manipulate objects, so you can guide non-interactive policies to align with your preferences!
5
44
5,591
Claudia D'Arpino 🤖🧠 retweeted

6 Nov 2025
🧠Reasoning VLAs generate textual plans 💬 via CoT before predicting actions 🦾. But do the predicted actions actually follow the plans? Introducing SEAL: a training-free runtime steering method that ensures VLAs "do what they say". Website: tinyurl.com/seal-vla (1/9)
2
2
13
6,778
25 Jun 2025
Excited to invite you to our #RSS2025 Workshop at RTH 109, where we’ll explore the frontier of Generative Models × Human–Robot Interaction! 🤖✨ Organizing with @robominyoung @sammy_j_c @haroldsoh @andreea7b @julie_a_shah
sites.google.com/view/gai-hr…
9:00 AM – Workshop Intro • @robominyoung
9:10 AM – Visual Embodied Planning • @RoozbehMottaghi
9:40 AM – Simulating People with Language Models—Good Idea? Bad Idea? • @ybisk
10:10 AM – Steerable & Interactive Robots in the Era of Large Models • @DorsaSadigh
10:40 AM – ☕ Coffee Break & Poster Session
11:30 AM – All Generative Models Are Wrong, But Some Are Useful • @robo_kween
12:00 PM – Panel 1: Are LLMs, VLMs, VLAs Robust Enough for Simulation & Interaction? Yonatan Bisk, Nadia Figueroa, Roozbeh Mottaghi, moderated by @CPDArobotics
12:30 PM – Lunch
1:30 PM – Stakeholder-Informed Physical Assistance: Leveraging Generative AI towards Real-World Caregiving Robots • @TapoBhat
2:00 PM – Individualized Models of Human Control in Assistive Robotics • @brenna_argall
2:30 PM – Spotlight Talks
3:00 PM – Demonstrating Arena 5.0 • @kastner_linh
3:30 PM – ☕ Coffee Break
4:10 PM – Panel 2: Foundation Models for Shared Autonomy & Assistive Robots. @V_Vanhoucke , Brenna Argall, Tapomayukh Bhattacharjee, moderated by @haroldsoh
5:00 PM – Best Paper Award & Wrap-Up
1
6
1,471
Claudia D'Arpino 🤖🧠 retweeted
1 Jun 2025
Humanoids are improving fast! With better, more usable hardware, controllers, and advances in RL and sim2real, they’re truly leveling up #ICRA2025
1
1
2
108
1 Jun 2025
What an incredible time at #ICRA2025! 🤖 Check out these video highlights to catch all the coolest robots in action—watch and relive the fun!
1
1
138
1 Jun 2025
The #ICRA2025 DEBATE “Data will Solve Robotics and Automation: True or False?” was especially fun and insightful—watch and listen carefully! Aude Billard, @animesh_garg, Leslie Kaelbling, Frank Park, Daniela Rus, @RussTedrake moderated by @Ken_Goldberg
1
2
169
1 Jun 2025
Looking forward to robots waltzing to Strauss beneath Vienna’s gilded domes next year! 🎻🤖 #ICRA2026
804
21 May 2025
Robot social navigation in the wild, as seen in the airport on my way to our Social Navigation Workshop @ #ICRA2025 Attend on Friday, Room 313, schedule here: socialnav2025.pages.dev/sche…
7 Feb 2025

🚀 Join us at #ICRA2025 for an exciting workshop on Advances in Social Navigation! Share your latest projects in socially-aware robot navigation or participate in our competition. Papers due March 24th! socialnav2025.pages.dev/

254
18 Mar 2025
I love keynotes – every second is a meticulously crafted blend of cutting-edge technology and the art of presenting it, with everything computed and simulated on GPUs. Hear about the new models and the future of AI:

Watch Jensen Huang unveil the latest breakthroughs in AI, robotics, accelerated computing, and more in the #GTC25 keynote.
Now live ⬇️ nvda.ws/42cD5I6
208
Claudia D'Arpino 🤖🧠 retweeted

7 Mar 2025
New research could enable users to correct a robot’s behavior with simple interactions, like pointing to an item or nudging a robot’s arm. This intuitive approach would allow a layperson to guide a robot right out of the box, no machine-learning required. mitsha.re/zTB150VcHAZ

ALT Person working on a robotic arm.
8
37
119
21,927