
Professor at MIT, studying robotics. Vice President of Robotics Research, Toyota Research Institute.
Joined July 2022
- Tweets 29
- Following 96
- Followers 3,329
- Likes 9
1 Photos and videos

Feb 11
I've been saying for years that the biggest challenge for simulation in robotics is not actually the physics engine (although you do have to get that right). The real challenge is capturing the *diversity* of the real world. There was no doubt that generative AI had the potential to change that, but it's still amazing to see it take shape.
Watching Nick's incredibly fast progress has convinced me that content generation might not actually be a bottleneck anymore. This is a beautiful combination of hardened tools for e.g. low-level mesh processing with the latest tools for generative asset creation, wrapped in a powerful agentic workflow. Please do give it a try and share your feedback.
Feb 11

Meet SceneSmith: An agentic system that generates entire simulation-ready environments from a single text prompt.
VLM agents collaborate to build scenes with dozens of objects per room, articulated furniture, and full physics properties.
We believe environment generation is no longer the bottleneck for scalable robot training and evaluation in simulation.
Website: scenesmith.github.io/
👇🧵(1/8)
12
33
325
38,091
Russ Tedrake retweeted

Jan 5
Introducing Large Video Planner (LVP-14B) — a robot foundation model that actually generalizes. LVP is built on video gen, not VLA. As my final work at @MIT, LVP has all its eval tasks proposed by third parties as a maximum stress test, but it excels!🤗
boyuan.space/large-video-pla…
23
94
574
98,413
Russ Tedrake retweeted

20 Aug 2025
Boston Dynamics and Toyota Research Institute are advancing humanoid robotics with Large Behavior Models (LBMs) for Atlas.
65
235
1,084
123,443
9 Jul 2025
TRI's latest Large Behavior Model (LBM) paper landed on arxiv last night! Check out our project website: toyotaresearchinstitute.gith…
One of our main goals for this paper was to put out a very careful and thorough study on the topic to help people understand the state of the technology, and to share a lot of details for how we're achieving it.
youtube.com/watch?v=BEXFnru5…
8
105
488
88,046
9 Jul 2025
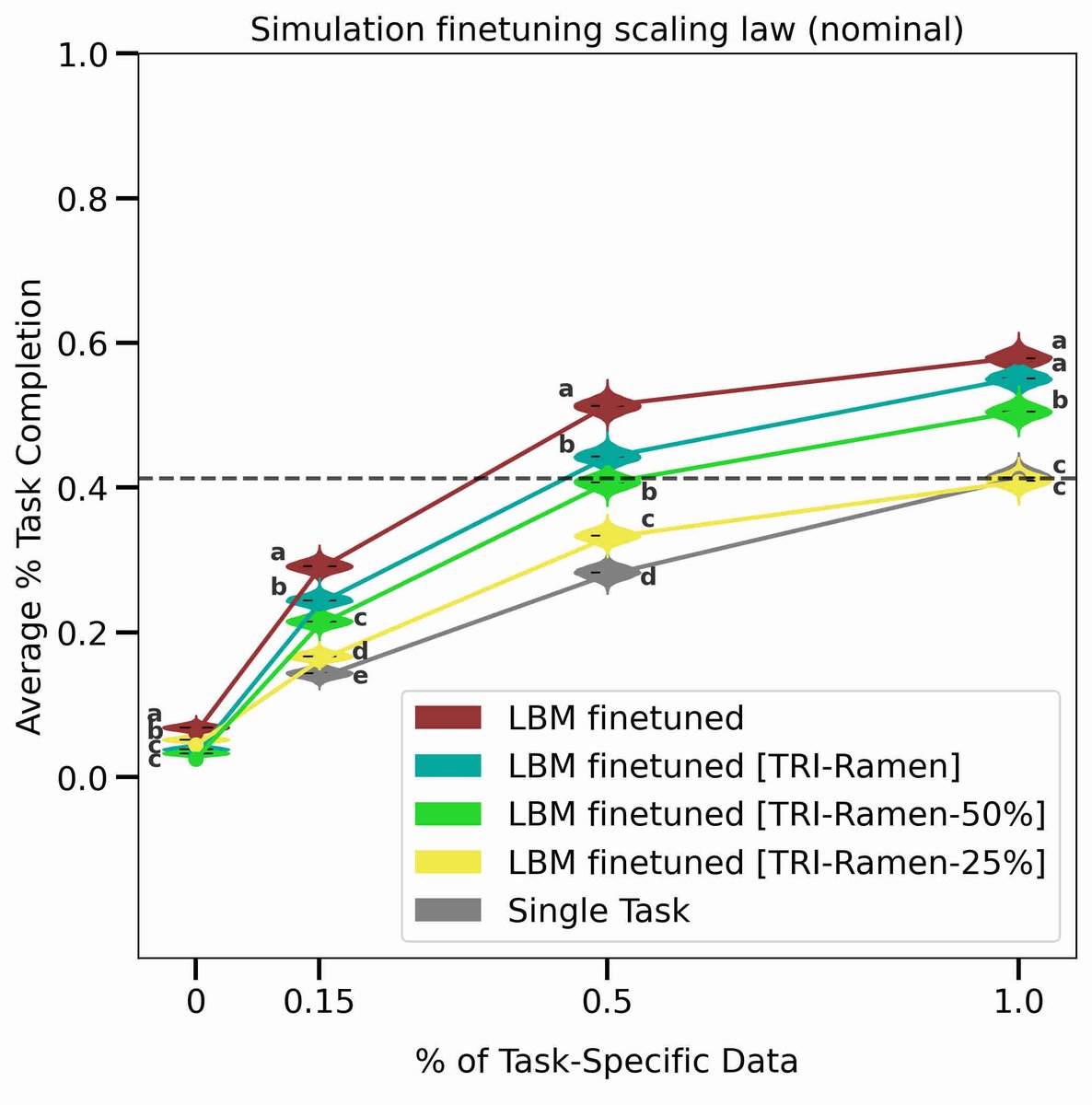
Probably my favorite plot from the paper, which sums it all up, is this one.
The plot compares performance using different amounts of pretraining data used before training a new task: 0% (aka single task), 25, 50, or 100% of TRI’s data, then 100% of TRI’s data all of the open-source robot data (the red line) that we’ve curated. It’s just awesome that the distributions over task completion are so tight and that trends as we increase data are so consistent. The results show clearly that with pretraining, we can train a novel skill with substantially less data or use the same amount of data and get much better task performance. And the benefits appear to continue with more data.
2
3
36
5,458
9 Jul 2025
This was a massive effort by the entire team, with a number of individuals really pouring their hearts into this paper. The paper is packed full of (too many?) details. Your comments and feedback would be very welcome.
14
2,983
11 May 2025
Very proud of Nicholas, who recently shared scalable-real2sim.github.io/ (for physics-quality assets from a small amount of interaction with a robot) and is now following up with his work on scene-level generation.
9 May 2025
Want to scale robot data with simulation, but don’t know how to get large numbers of realistic, diverse, and task-relevant scenes?
Our solution:
➊ Pretrain on broad procedural scene data
➋ Steer generation toward downstream objectives
🌐 steerable-scene-generation.g…
🧵1/8
1
7
69
8,710
2 Apr 2025
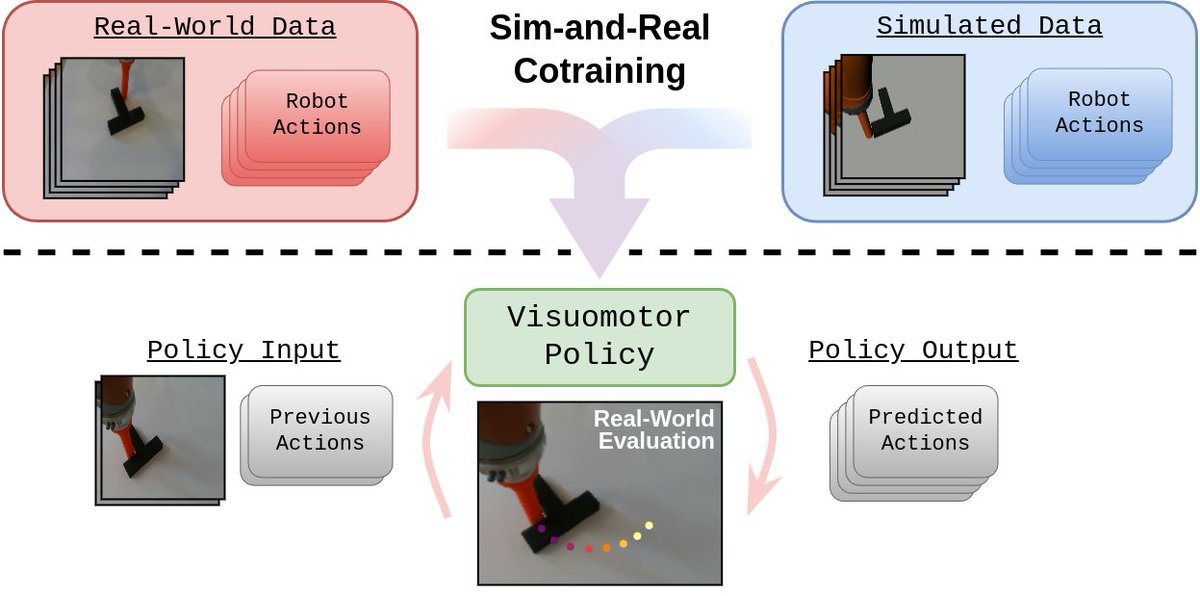
This work really sharpened my thinking about sim real cotraining.

Learning from both sim real data could scale robot imitation learning. But what are the scaling laws & principles of sim real cotraining?
We study this in the first focused analysis of sim real cotraining spanning 250 policies & 40k evals arxiv.org/abs/2503.22634 (1/6)
3
3
56
5,855
2 Apr 2025
In my mind, it's a bit like a biology paper that is focused on a particular animal model. I hope we'll learn more quickly from each other if we can make precise, substantiated claims about particular setups, so that as a field we can assemble those claims into a coherent picture.
10
1,711
2 Apr 2025
Side note: I'm proud of the title of this paper, which we intentionally made pretty narrow/specific. I think that some of the most important work that we have to do as a field right now is careful empirical work to interrogate the properties of these models that we're creating.
15
1,436
2 Apr 2025
One of the most interesting take-aways for me is that "high-performing policies need to know whether they are executing in sim or in real." A number of implications flow from that, including that sim real cotraining can decrease performance if the visual gap is too small.
2
1,165
Russ Tedrake retweeted

10 Mar 2025
New Paper: "Scalable Real2Sim: Physics-Aware Asset Generation via Robotic Pick-and-Place Setups"! 🤖
We introduce a fully automated pipeline that generates simulation-ready assets for real-world objects—no manual intervention needed!
🌐 Website: scalable-real2sim.github.io/
(1/5)⬇️

4
21
121
13,237
Russ Tedrake retweeted
11 Feb 2025
Announcing Diffusion Forcing Transformer (DFoT), our new video diffusion algorithm that generates ultra-long videos of 800 frames. DFoT enables History Guidance, a simple add-on to any existing video diffusion models for a quality boost. Website: boyuan.space/history-guidanc… (1/7)
6
86
474
176,094
17 Oct 2024
I'm super excited to start a great new collaboration with the fantastic team at Boston Dynamics. Scott Kuindersma and I chatted with Evan Ackerman about it earlier today.
spectrum.ieee.org/boston-dyn…
9
41
416
31,975
Russ Tedrake retweeted

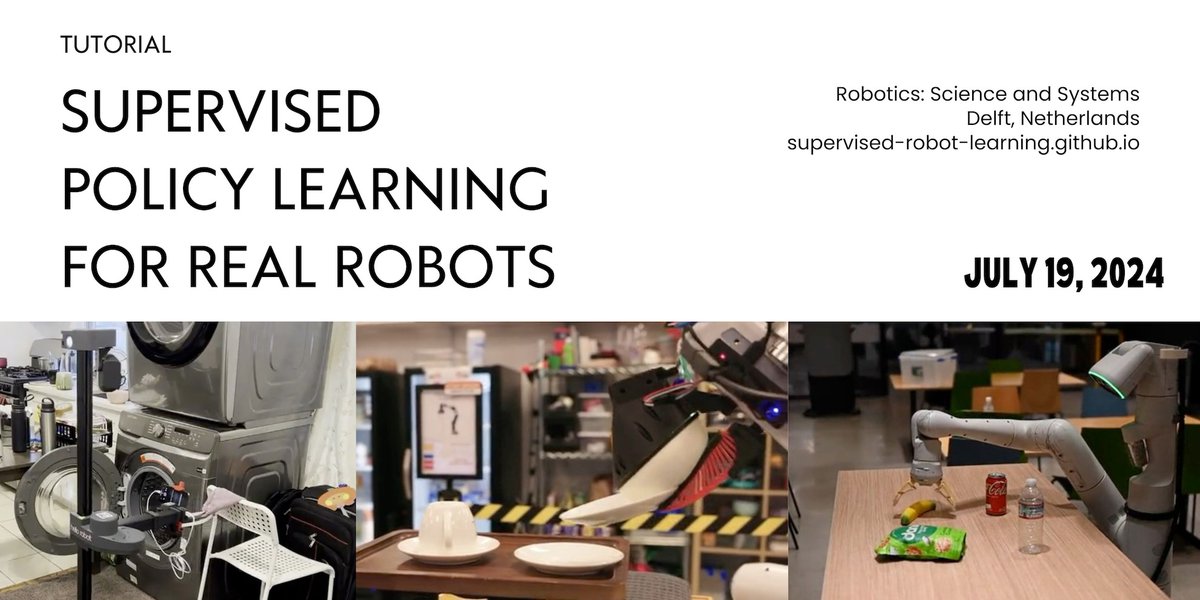
8 Jul 2024
This #RSS2024 on July 19, we are organizing a tutorial on supervised policy learning for real world robots!
Talks by @notmahi & @RussTedrake will cover the fundamentals of imitation, recent algorithms, walk-through code, and practical considerations.
supervised-robot-learning.gi…
4
22
122
66,364
Russ Tedrake retweeted
3 Jul 2024
Introducing Diffusion Forcing, which unifies next-token prediction (eg LLMs) and full-seq. diffusion (eg SORA)! It offers improved performance & new sampling strategies in vision and robotics, such as stable, infinite video generation, better diffusion planning, and more! (1/8)
13
209
1,355
208,550
Russ Tedrake retweeted

6 Mar 2024
And if you’re at all interested in humanoids you need to check out Punyo, from TRI, a soft-body humanoid capable of whole-body manipulation. A soft robot like this could be extremely helpful for in-home robots. Check out their medium post: medium.com/toyotaresearch/me…
1
2
7
2,358
Russ Tedrake retweeted

5 Mar 2024
a bit surprised TRIs new robot has gotten little love on X
current humanoid approaches seem very hand centric but we use tactile sensing across our whole body to do tasks
4
4
38
6,722
Russ Tedrake retweeted

23 Feb 2024
Check out @chichengcc's step-by-step tutorial on building the UMI gripper. We really hope to see more UMIs running in the wild. 😊
23 Feb 2024

We made a step-by-step video tutorial for building the UMI gripper! Please leave comments on @YouTube if you have any question
youtu.be/x3ko0v_xwpg

2
50
7,006