
Curious about robotics
Joined July 2013
- Tweets 12
- Following 234
- Followers 34
- Likes 136
3 Photos and videos


Yifei Cheng retweeted

May 27
We are back again :) After three weeks of quiet building.
Introducing Genesis World 1.0, our latest simulation platform, the second release in our full-stack suite. Open-sourced.
Robotics is still bottlenecked by the 1× speed of the physical world. Every model, checkpoint, and data recipe eventually needs to be tested on physical hardware, slowly, expensively, and with limited coverage.
One hour in reality can become 100 days in simulation. That is how robotics model iteration moves from a wall-clock bottleneck to a compute problem.
To make this work, simulation has to be both fast and trustworthy.
Over the past year, we rebuilt the entire stack: a GPU-accelerated cross-platform compiler, penetration-free multi-physics contact solvers, unified rigid and deformable physics, and a photo-realistic renderer purpose-built for physical AI applications.
We built Nyx, a high-performance path-traced rendering engine for robotics application.
Genesis World 1.0 achieves near realtime performance with our latest development for penetration-free IPC solver, supporting various types of deformables beyond rigid bodies. It supports contact-rich, dexterous manipulation simulation across different embodiments: unitree, sharpa, wuji, genesis hand and various types of grippers.
Under the hood is Quadrants, our effort in pushing forward cross-platform GPU-accelerated computation. Quadrants started as a fork of Taichi, and we rebuilt most of the critical parts for optimizing simulation workloads, giving 10x faster launch time and up to 4.6x runtime performance compared to the initial Genesis release.
Together, they bring us to an unprecedentedly low sim-to-real gap, enabling zero-shot real-to-sim model evaluation and much faster iteration of GENE.
All available today.
Genesis World 1.0: github.com/Genesis-Embodied-…
Quadrants: github.com/Genesis-Embodied-…
Nyx: github.com/Genesis-Embodied-…
67
176
974
284,860
Yifei Cheng retweeted
May 6
We are back. After one year of quiet building.
Introducing GENE-26.5, our first robotic brain that takes a major step toward human-level capability.
For years, robotics has struggled to learn from the world’s largest and valuable data source: Humans.
Solving it means rethinking the whole stack from the ground up:
- A robotics-native foundation model.
- A 1:1 human-like robotic hand.
- A noninvasive data collection glove for motion, force, and touch.
- A simulator that turns weeks of experiments into minutes.
GENE-26.5 is trained across language, vision, proprioception, tactile, and action. We designed a set of tasks to test how far we can go with this new paradigm.
Fully autonomous, 1x speed, one model, same weights. (Enjoy with sound on)
We are approaching the endgame for robotics.
And this is just a beginning.
280
1,134
5,816
2,690,888
Yifei Cheng retweeted

7 Oct 2025
Our first X post as we break stealth and share a huge milestone for Remedy Robotics, the introduction of the Remedy N1 System and its successful completion of the world’s first fully remote neurointerventional procedures.
1
2
3
106

7 Sep 2025
🤖📦🐍 Ever wish you could simply "pip install" ROS like any other Python package?
With my latest project ros-python-wheels, ROS 2 packages can now be built into self-contained Python wheels that are installable by Pip! This enable a first-class developer experience when working with ROS in Python projects:
🚀 𝗘𝗮𝘀𝘆 𝗣𝗿𝗼𝗷𝗲𝗰𝘁 𝗜𝗻𝘁𝗲𝗴𝗿𝗮𝘁𝗶𝗼𝗻: To include The ROS Python Client (rclpy) in a Python project, simply add "ros-rclpy[fastrtps]" (and its package repository) to your pyproject.toml or requirements.txt file.
🛠️ 𝗘𝗻𝗮𝗯𝗹𝗲 𝗠𝗼𝗱𝗲𝗿𝗻 𝗣𝘆𝘁𝗵𝗼𝗻 𝗧𝗼𝗼𝗹𝗶𝗻𝗴: Easily manage Python ROS dependencies using modern Python tools like uv and Poetry
🪶 𝗟𝗶𝗴𝗵𝘁𝘄𝗲𝗶𝗴𝗵𝘁: The wheels of rclpy and all of its dependencies have a total size of 15MB.
🌍 𝗣𝗼𝗿𝘁𝗮𝗯𝗹𝗲: Allows ROS to be run on different Linux distributions
rclpy and common message interfaces have been packaged and hosted at Python package repositories for every ROS distribution at @cloudsmith
➡️ Project Link: github.com/ycheng517/ros-pyt…
I’d love to hear your thoughts on this approach. I’d also appreciate a star on my project if you think this is a good direction for ROS!
@OpenRoboticsOrg #ros #robotics
1
3
12
1,699
Yifei Cheng retweeted

8 Aug 2025
Here is your #ROS and robotics news for the week of August 4th, 2025:
🐚 9 days left to get discount ROSCon tickets
🐚 New ROS 2 @LeRobotHF bridge
🐚 ROS 2 control driver for @PSYONICinc hand
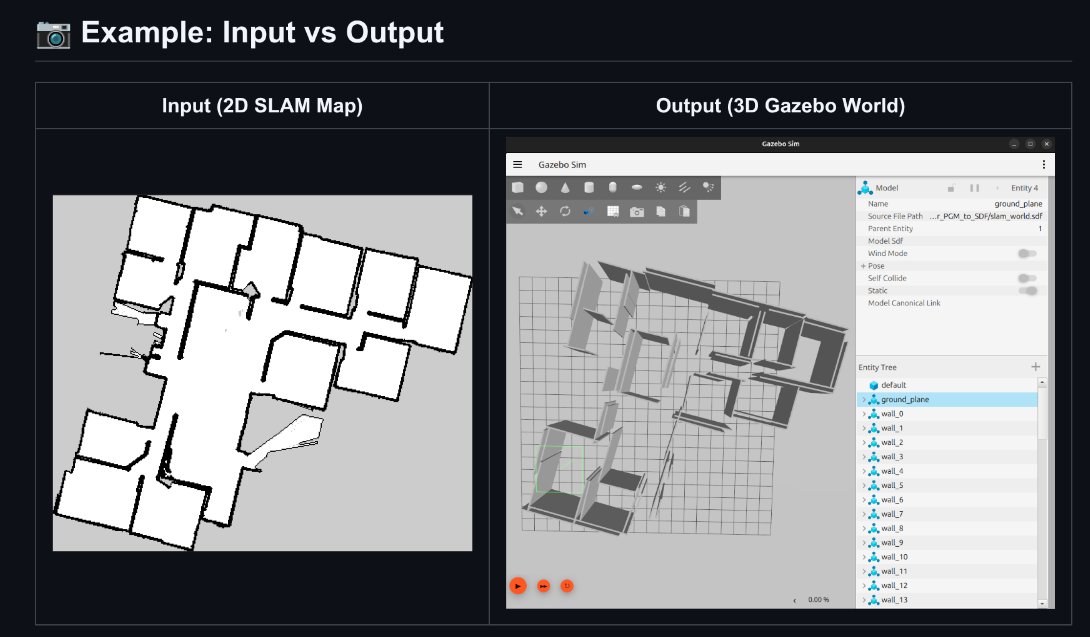
🐚 Make Nav2 maps into @GazeboSim
🐚CFP for @PX4Autopilot summit
⬇️⬇️⬇️

2
6
31
5,064
4 Aug 2025
Showcasing lerobot-ros, a lightweight ROS 2 interface for LeRobot. It enable any ros2_control or MoveIt2-compatible robotic arm to integrate with LeRobot’s full suite of capabilities.
Project: github.com/ycheng517/lerobot…
#lerobot #ros #Robotics #AI
1
2
11
794
18 May 2024
Showcasing the first version of my side project: Tabletop Handybot 🤖, a low-cost AI powered robotic arm assistant that listens to your voice commands and can carry out a variety of tabletop tasks.
Github: github.com/ycheng517/tableto…
1
2
47