
Programming and robotics enthusiast, Linux literate, likes to explain programming and robotics to everyone, and working on modern Moon robots
Joined March 2019
- Tweets 1,557
- Following 221
- Followers 531
- Likes 3,469
111 Photos and videos









Dave's RoboShack retweeted

Jun 11
One professor at the University of Bonn quietly put his entire robotics curriculum on YouTube: SLAM. Sensor fusion. State estimation. Probabilistic robotics. Self-driving cars. Motion planning. Photogrammetry.
Cyrill Stachniss has been uploading full university lectures for years!
Each topic is a complete playlist; the kind of material that normally costs a semester of tuition.
He's one of the most cited researchers in mobile robotics and mapping. His students go on to build the navigation stacks powering real autonomous systems.
If you're serious about understanding how robots know where they are... this is the place to start.
Free. On YouTube.
📌 [youtube.com/@CyrillStachniss]
——
Weekly robotics and AI insights.
Subscribe free: 22astronauts.com

1
117
770
21,706
Dave's RoboShack retweeted

Mar 31
C framework for 3D reconstruction from images
github.com/openMVG/openMVG
1
47
402
15,361
Dave's RoboShack retweeted

First FreeCAD book copy received!
Recently, I have published the FreeCAD Beginner's Handbook and have now received my first own copy. This moment is the result of a lot of ups and downs and is one of the biggest projects of my entire life. I hope you like it. #MadeWithFreeCAD
14
17
128
9,356

4 Dec 2025
This sounds way too advanced for our time 😮

1
64
Dave's RoboShack retweeted

28 Nov 2025
Swiss researchers have introduced a technology that sounds like science fiction: a crystal-based battery capable of generating power for centuries without needing to recharge. Built using stable crystalline structures and radioactive decay energy capture, the battery releases a slow, consistent electrical output for hundreds of years.
Unlike traditional batteries, it doesn’t degrade, leak, overheat, or lose capacity. Early prototypes show enormous potential for spacecraft, medical implants, AI sensors, underwater systems, and deep-earth machines — devices where replacing a battery is nearly impossible.
If scaled, this invention could redefine global energy infrastructure, powering the future with a device that outlives generations.

354
1,752
7,318
292,161
15 Nov 2025
I was making slides for a conference I will present a paper, and I have to say that PowerPoint is letting me down more and more.
It used to be the gold standard for me to make slides, but the online version lacks so many (basic) features. 😩
1
1
60
15 Nov 2025
Desktop version is not available for Linux.
What I am missing this time, automatically going to the next slide after x seconds, and automatically starting a video when the slide appears... How can this last feature not be available?
1
55
28 Oct 2025
Why does NVIDIA keeps breaking my daily operations?
2
70
Dave's RoboShack retweeted

21 Oct 2025
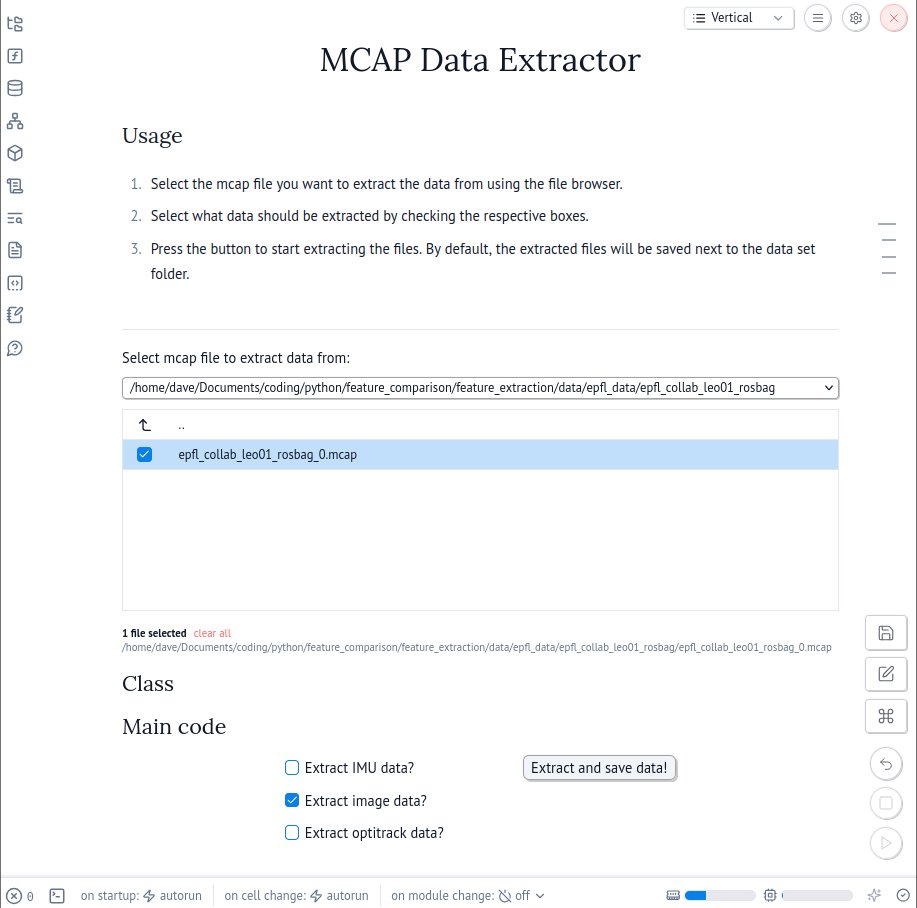
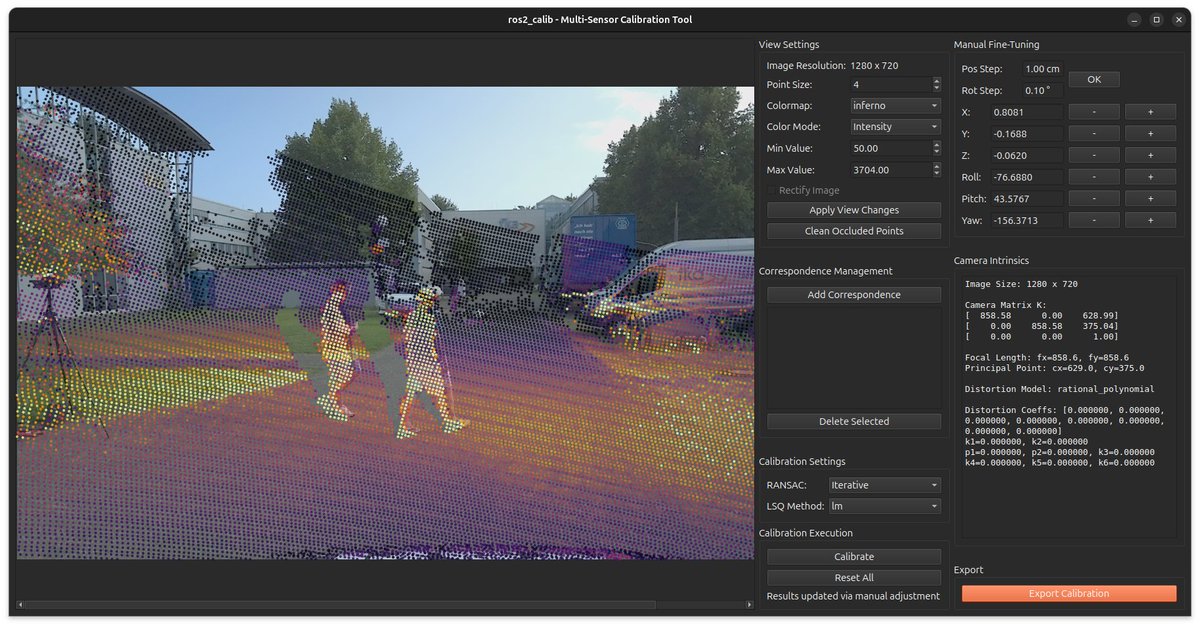
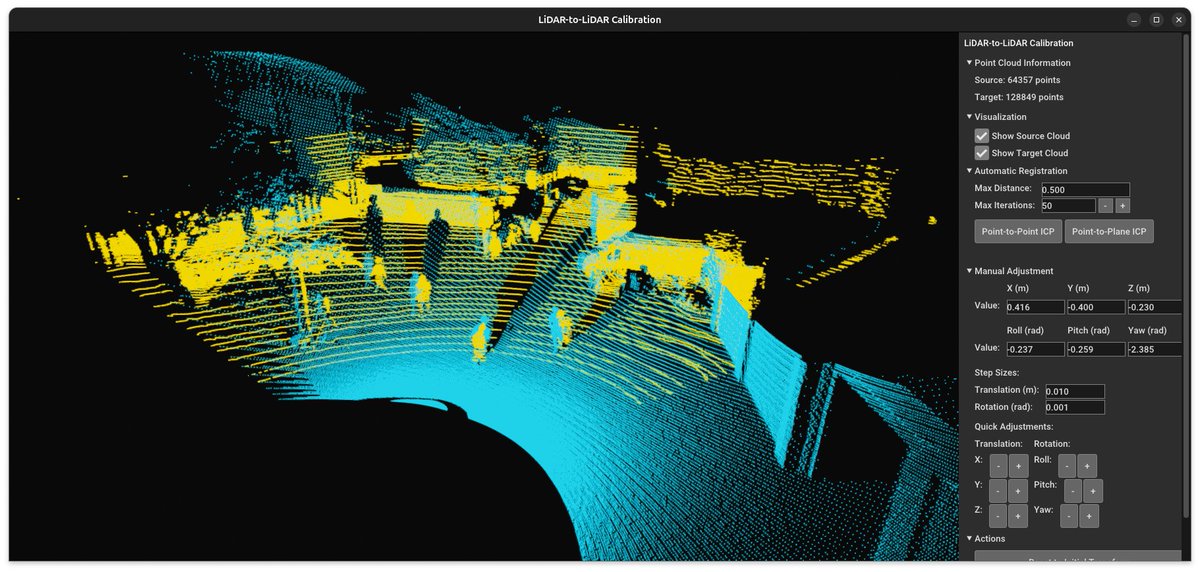
ros2_calib
Make your calibration dreams come true. ros2_calib is a Multi-Sensor Calibration Tool using ROS2 mcap recordings with direct URDF export.
github.com/ika-rwth-aachen/r…
1
23
199
8,723
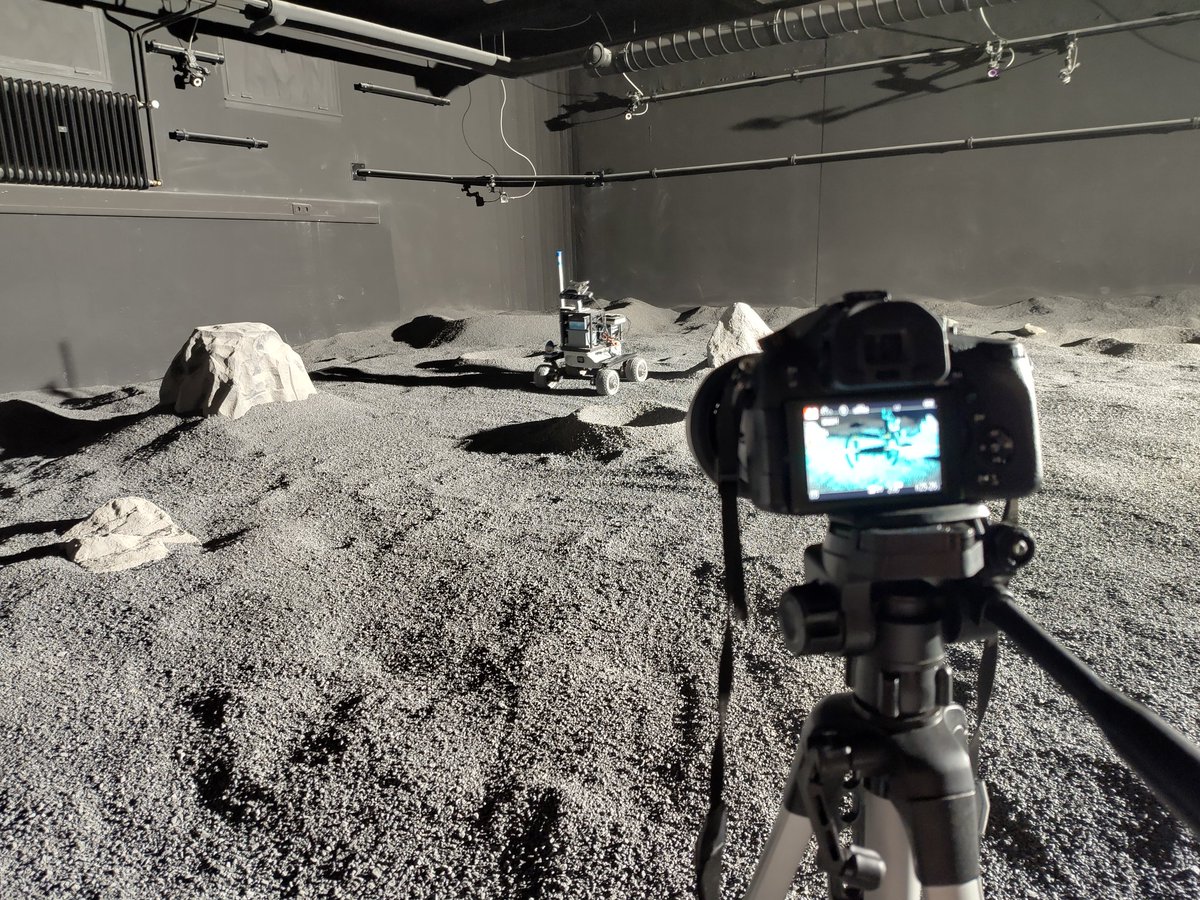
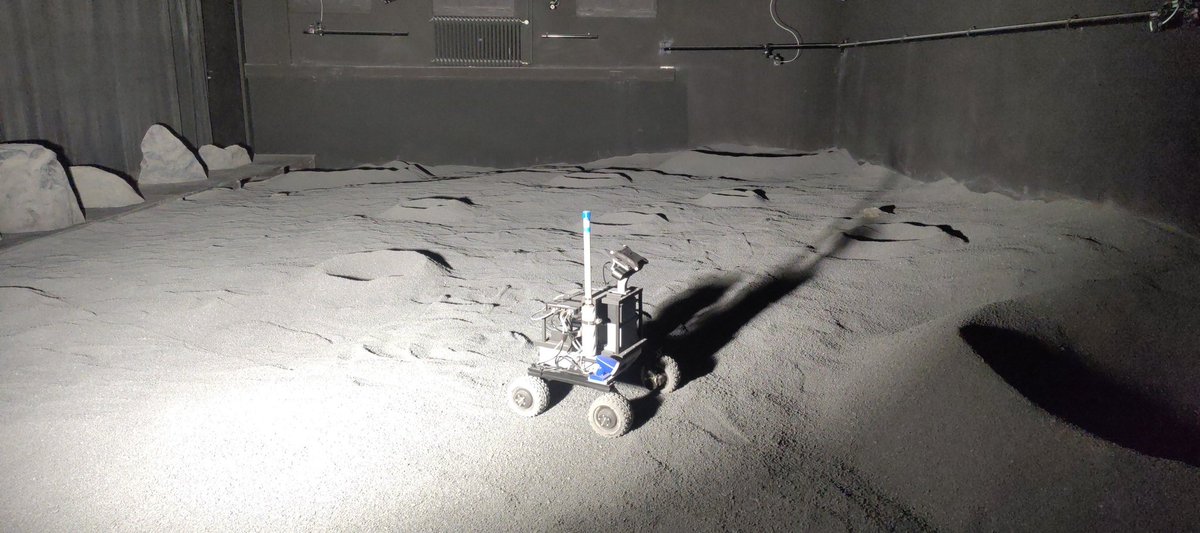
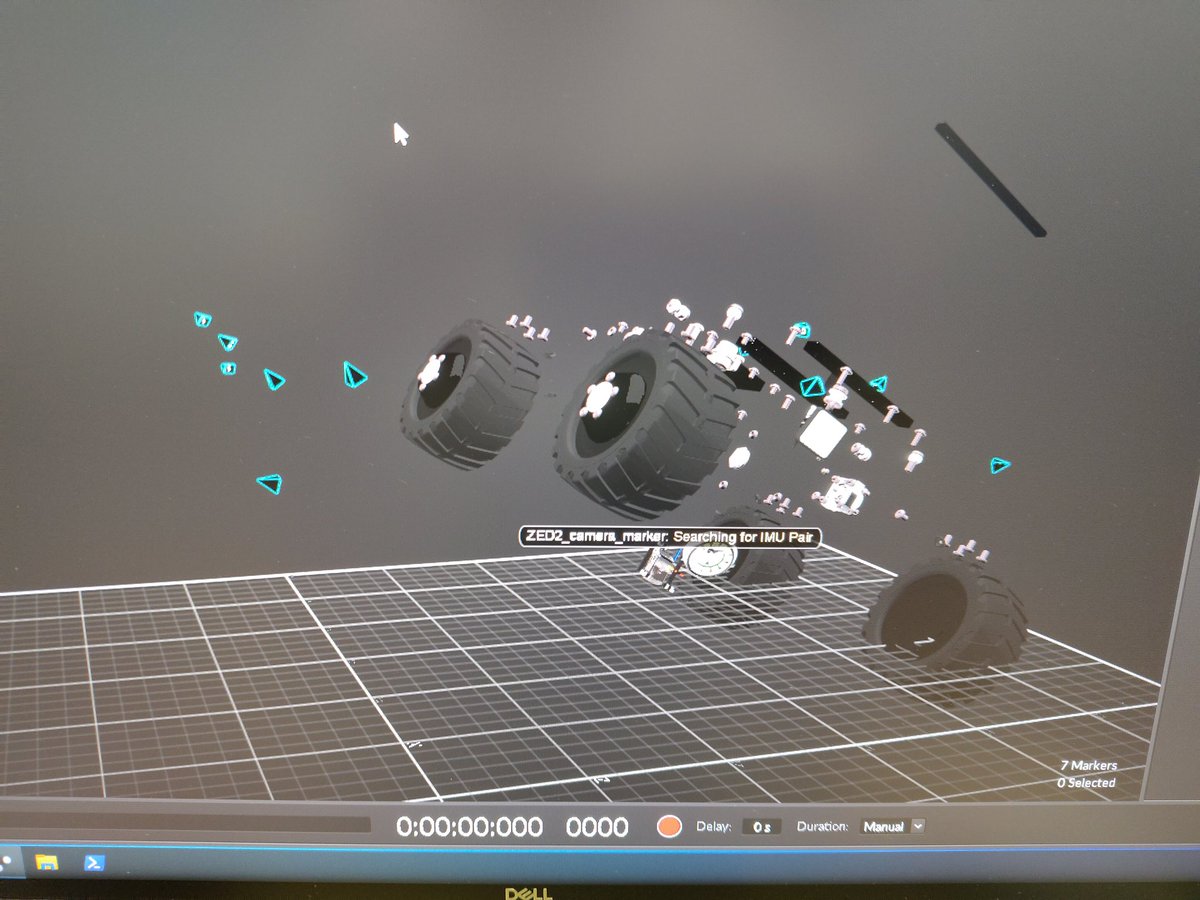
21 Oct 2025
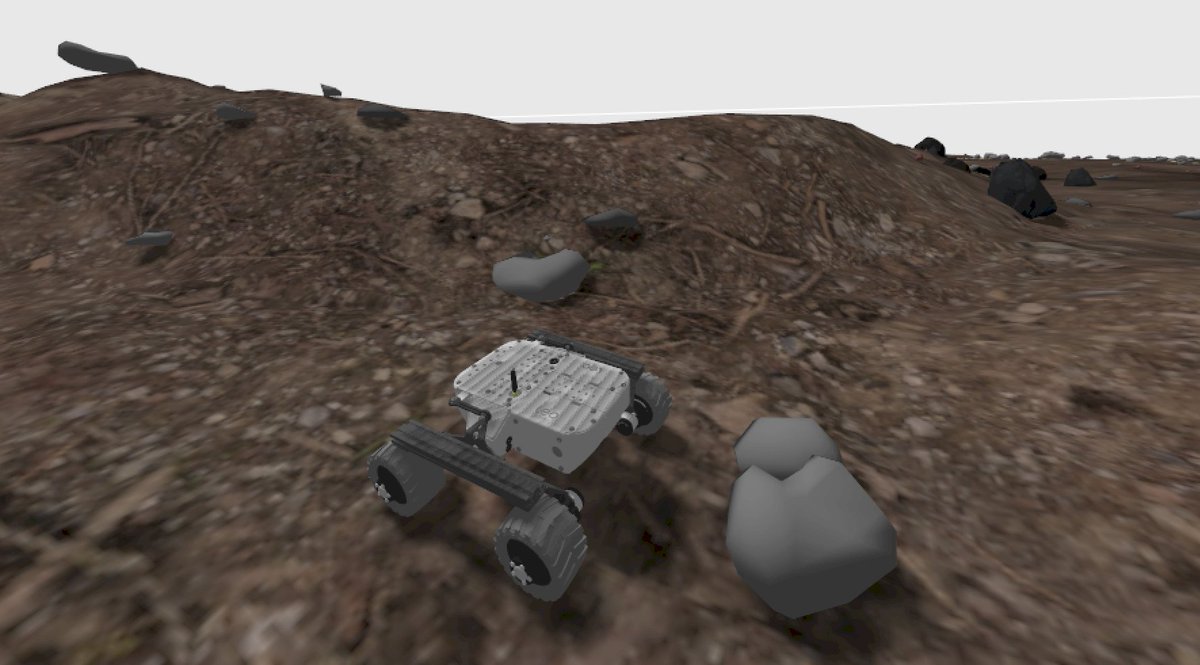
This morning, I presented our paper with about REALMS2 for the ESA-ESRIC Space Resources Challenge at the IROS 2025 conference in Hangzhou, China 😃
58
Dave's RoboShack retweeted

26 Sep 2025
😠💢😵💫Tired of endless data collection & fine-tuning every time you try out VLA?
Meet RDT2, the first foundation model that zero-shot deploys on any robot arms with unseen scenes, objects & instructions.
No collection. No tuning. Just plug and play🚀
Witness a clear sign of embodied superintelligence
- 7B one-step diffusion → 23 Hz inference⚡
- Re-designed UMI @chichengcc @SongShuran and manufactured 100 portable devices
- Trained on 10K-hour UMI data on 100 real houses
- Zero-shot: pick, place, press, wipe… open-vocabulary
- Demos: block 30 m/s arrows in 500 ms🛡️; first to play ping-pong with an end-to-end model 🏓; extinguish burning incense by shaking quickly🥢
Fully open source at github.com/thu-ml/RDT2
Project page: rdt-robotics.github.io/rdt2/
Thanks to awesome collaborators @bang_guo96535 @D0g4M74794 @EthanNg51931527
85
99
581
101,174

I'm observing a mini Moravec's paradox within robotics: gymnastics that are difficult for humans are much easier for robots than "unsexy" tasks like cooking, cleaning, and assembling. It leads to a cognitive dissonance for people outside the field, "so, robots can parkour & breakdance, but why can't they take care of my dog?" Trust me, I got asked by my parents about this more than you think ...
The "Robot Moravec's paradox" also creates the illusion that physical AI capabilities are way more advanced than they truly are. I'm not singling out Unitree, as it applies widely to all recent acrobatic demos in the industry. Here's a simple test: if you set up a wall in front of the side-flipping robot, it will slam into it at full force and make a spectacle. Because it's just overfitting that single reference motion, without any awareness of the surroundings.
Here's why the paradox exists: it's much easier to train a "blind gymnast" than a robot that sees and manipulates. The former can be solved entirely in simulation and transferred zero-shot to the real world, while the latter demands extremely realistic rendering, contact physics, and messy real-world object dynamics - none of which can be simulated well.
Imagine you can train LLMs not from the internet, but from a purely hand-crafted text console game. Roboticists got lucky. We happen to live in a world where accelerated physics engines are so good that we can get away with impressive acrobatics using literally zero real data. But we haven't yet discovered the same cheat code for general dexterity.
Till then, we'll still get questioned by our confused parents.
144
546
2,504
397,816
14 Jul 2025
I want one 🤩
13 Jul 2025

Star Wars showed them to you in ‘77.
You grew up watching robots on screen.
But what if you could actually buy one?
For your lab. For your classroom.
For your... kid.
A French startup made it real, and affordable:🧵

87
Dave's RoboShack retweeted

10 Jul 2025
Let me introduce more details about our new quadruped robot, KLEIYN.
This robot is capable of chimney climbing on walls of various widths, like Ninja!
I will explain its design and learning methodology.
Thread👇
16
60
360
33,738
Dave's RoboShack retweeted
30 Jun 2025
DualMap: Online Open-Vocabulary Semantic Mapping for Natural Language Navigation in Dynamic Changing Scenes
github.com/Eku127/DualMap
>DualMap is an online open-vocabulary mapping system that enables robots to understand and navigate dynamic 3D environments using natural language.

17
123
7,143
Dave's RoboShack retweeted
28 Jun 2025
NVlabs/PyCuVSLAM
Highly accurate and efficient VSLAM system for Python
github.com/NVlabs/PyCuVSLAM
> PyCuVSLAM is the official Python wrapper around the cuVSLAM visual-inertial SLAM (Simultaneous Localization And Mapping) software package developed by NVIDIA. It is a highly accurate and computationally efficient package using CUDA acceleration for real-time visual-inertial SLAM.
5
50
303
14,630
18 Jun 2025
5
98
Dave's RoboShack retweeted

5 Jun 2025
This announcement is very important for robotic startups.
USB is unreliable on real-world product and having a RealSense camera with Power over Ethernet is great!
intelrealsense.com/depth-cam…
15
26
326
21,767
Dave's RoboShack retweeted
28 May 2025
This is the most amazing thing I saw in the ROS community EVER
reddit.com/r/ROS/s/3IuPSFdy1…
1
14
50
4,389
20 May 2025
Sounds interesting indeed 👀
20 May 2025

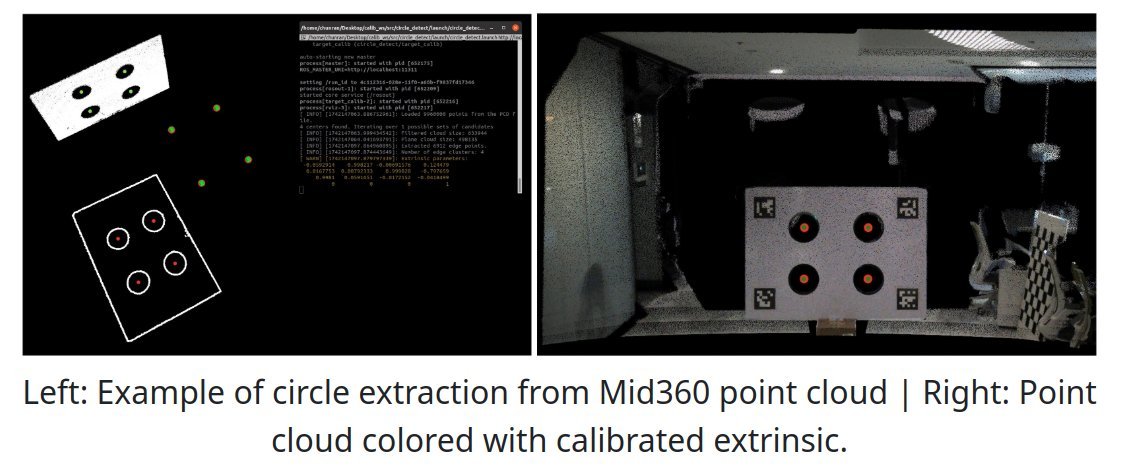
FAST-Calib
A Handy Extrinsic Calibration Tool for LiDAR-camera Systems.
github.com/hku-mars/FAST-Cal…
Key highlights include:
・Support solid-state and mechanical LiDAR.
・No need for any initial extrinsic parameters.
・Achieve highly accurate calibration results in just 2 seconds.
685