
PhD student in robotics @Stanford | Ham radio (DE BI1NWO 73) | Prev @Tsinghua_Uni
Joined October 2013
- Tweets 122
- Following 241
- Followers 414
- Likes 701
25 Photos and videos









Pinned Tweet

30 May 2025
Collecting manipulation data with DexUMI. Let’s scale up together! 📈
Big shoutout to my amazing project co-lead Mengda @mengdaxu__ , who brought full stack experience, strong system design skills, and unique insight to make this possible! 🙌
30 May 2025

Can we collect robot dexterous hand data directly with human hand?
Introducing DexUMI:
0 teleoperation and 0 re-targeting dexterous hand data collection system → autonomously complete precise, long-horizon and contact-rich tasks
Project Page: dex-umi.github.io
1
3
22
3,141
Han Zhang retweeted

Apr 30
🤖Low-data post-training can teach a VLA policy a new robot skill. But it also makes it too attached to the training demos.
We call this lock-in🔒: the policy can execute the post-training task, yet fails to respond to seemingly obvious prompt changes.
DeLock preserves steerability using only the policy’s own pretrained knowledge. No extra supervision needed!🚀🚀🚀
#Robotics #AI #EmbodiedAI #VLA
5
43
178
31,387
Han Zhang retweeted

Mar 25
Can we learn whole-body mobile manipulation directly from human demonstrations?
Introducing Whole-Body Mobile Manipulation Interface (HoMMI)
Egocentric UMI, 0 teleop -> bimanual & whole-body manipulation, long-horizon navigation, active perception
hommi-robot.github.io
12
72
331
74,843
Han Zhang retweeted

19 Nov 2025
Introducing ACT-1: The frontier robot AI behind Memo.
ACT-1 enables Memo to perform: 🎭
⏰ Lengthy tasks like cleaning up after your dinner
🦾 Dexterous tasks such as folding socks
☕ Daily delights like making an espresso
How does it work? 🧵
41
102
889
201,014
20 Nov 2025
I really love the elegant hardware design, especially the glove and gripper. Sunday is making every Sunday brighter. Huge congrats to Cheng, Tony and the team!
19 Nov 2025

From glove data to long-horizon, dexterous, precise and whole-body manipulation ⚙️ Details in this thread!
1
287
Han Zhang retweeted

15 Nov 2025
mm level precision beyond actuator limits, so much torque that you need to manage thermals. Owning the whole stack from HW to AI is the only way 🦾
25
23
398
110,162
Han Zhang retweeted

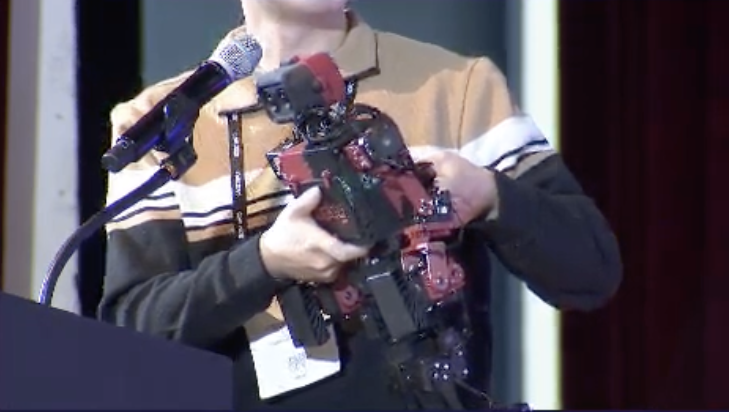
2 Oct 2025
Toddy enjoyed his time in Seoul — his first big trip away from home!😆 He rolled around on wheels, showed off his pull-up skills (Cr: @li_yitang), spoke in the spotlight as a 1.5-year-old, and presented at the poster session.


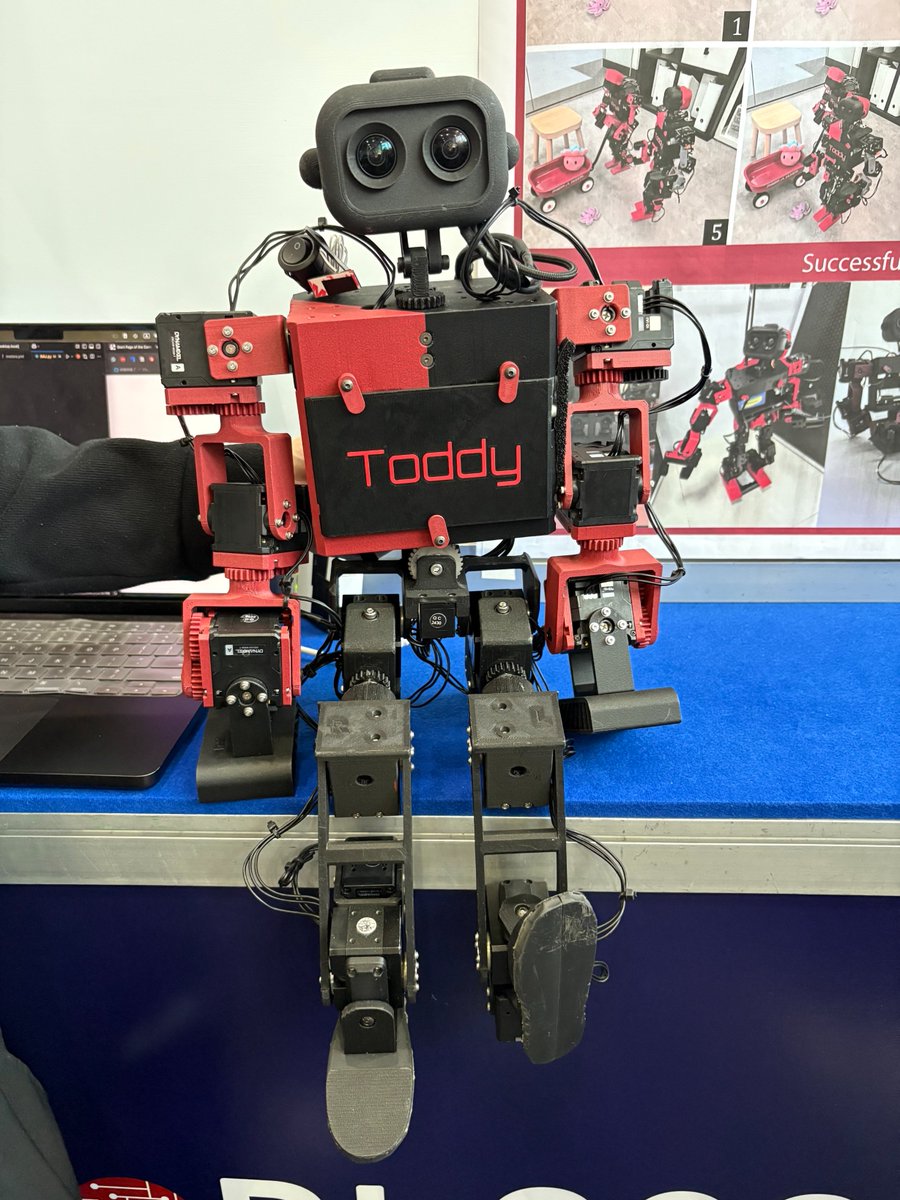
26 Aug 2025

ToddlerBot is accepted to CoRL, and we will bring Toddy (2.0 version) to Seoul for a trip. Come and say hi to Toddy if you're around😁! Our arxiv paper is also updated with more technical details in the appendix: arxiv.org/abs/2502.00893

3
7
77
12,145
Han Zhang retweeted

8 Sep 2025
How do we unlock the full dexterity of robot hands with data, even beyond what teleoperation can achieve?
DEXOP captures natural human manipulation with full-hand tactile & proprio sensing, plus direct force feedback to users, without needing a robot👉dex-op.github.io/
31
269
1,440
197,659
Han Zhang retweeted

8 Aug 2025
Collecting dexterous humanoid robot data is difficult to scale. That's why @mengdaxu__ and @DoubleHan07 built DexUMI: a tool for demonstrating how to control a dexterous robot hand, which allows you to quickly collect task data.
Co-hosted by @micoolcho and @chris_j_paxton
10
23
26,344
Han Zhang retweeted

8 Aug 2025
Human hands are incredibly capable manipulators, but it's hard to get high-quality robot data for learning policies. DexUMI provides a solution: a tool by which you can naturally "puppet" a dexterous hand with your own, in order to learn skills that directly transfer to a robot. Learn more ->
8 Aug 2025

Collecting dexterous humanoid robot data is difficult to scale. That's why @mengdaxu__ and @DoubleHan07 built DexUMI: a tool for demonstrating how to control a dexterous robot hand, which allows you to quickly collect task data.
Co-hosted by @micoolcho and @chris_j_paxton
5
27
183
18,340
Han Zhang retweeted
7 Aug 2025
Full episode dropping soon!
Geeking out with @mengdaxu__ @DoubleHan07 on DexUMI: Using Human Hand as the Universal Manipulation Interface for Dexterous Manipulation dex-umi.github.io
Co-hosted by @micoolcho @chris_j_paxton
1
4
38
3,041
23 Jun 2025
Excited to present DOGlove at #RSS2025 today!
We’ve brought the glove with us, come by and try it out!
📌 Poster: All day at #54 (Associates Park)
🎤 Spotlight talk: 2:00–3:00pm (Bovard Auditorium)
3
39
3,231
Han Zhang retweeted

16 Jun 2025
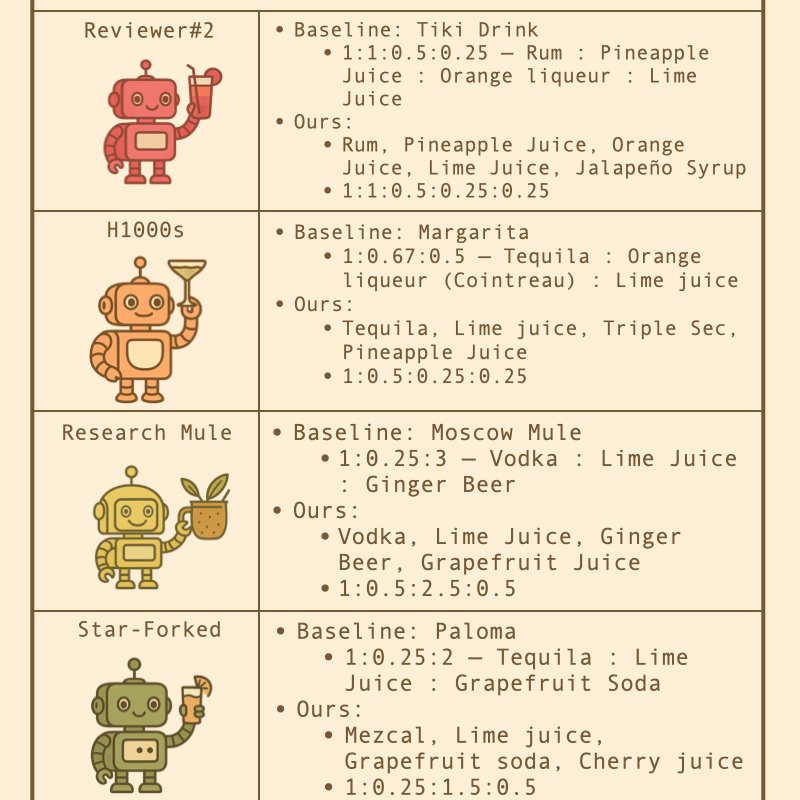
Our lab at Stanford usually do research in AI & robotics, but very occasionally we indulge in being functional alcoholics -- Recently we hosted a lab cocktail night, and created drinks with research-related puns like 'reviewer#2' and 'make 6 figures', sharing the full recipes here in case you are looking for a fun summer drink:

9
8
270
27,058
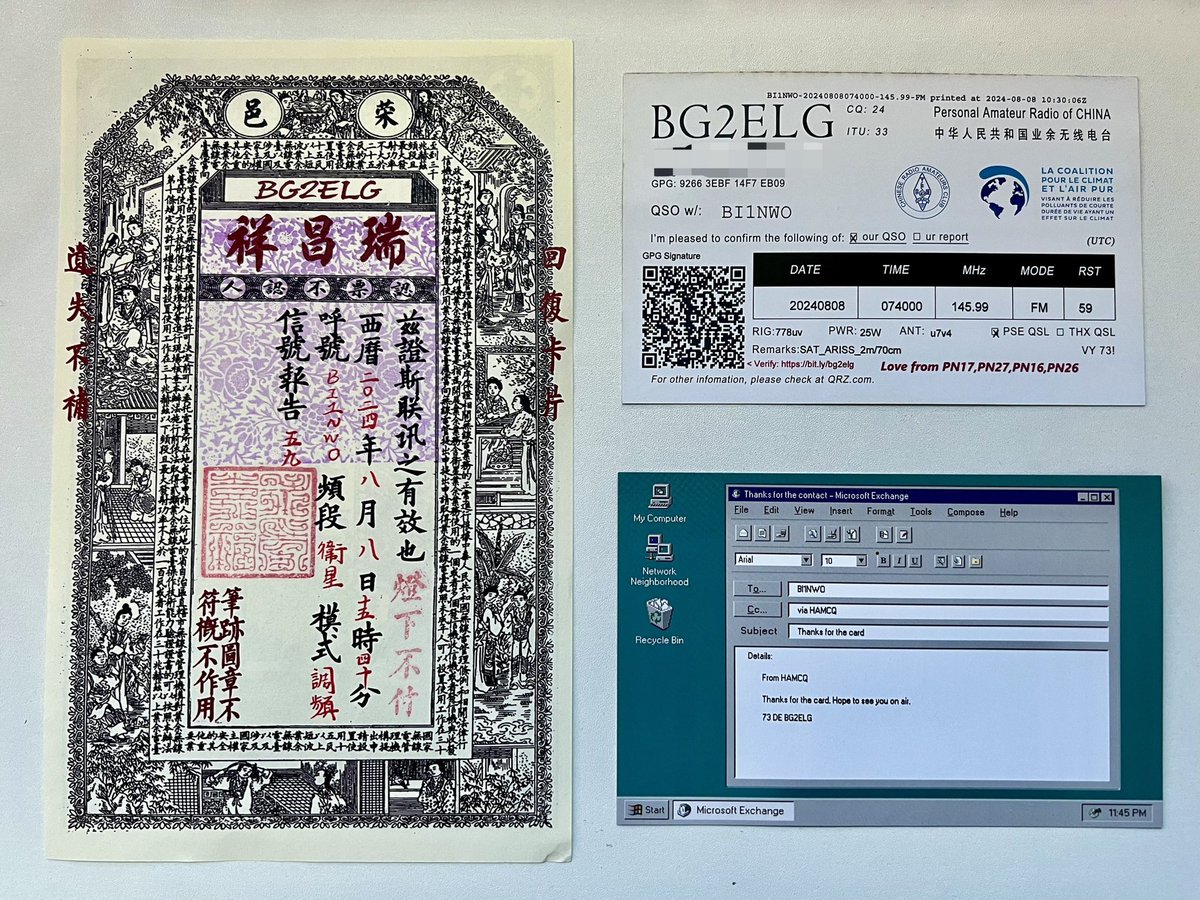
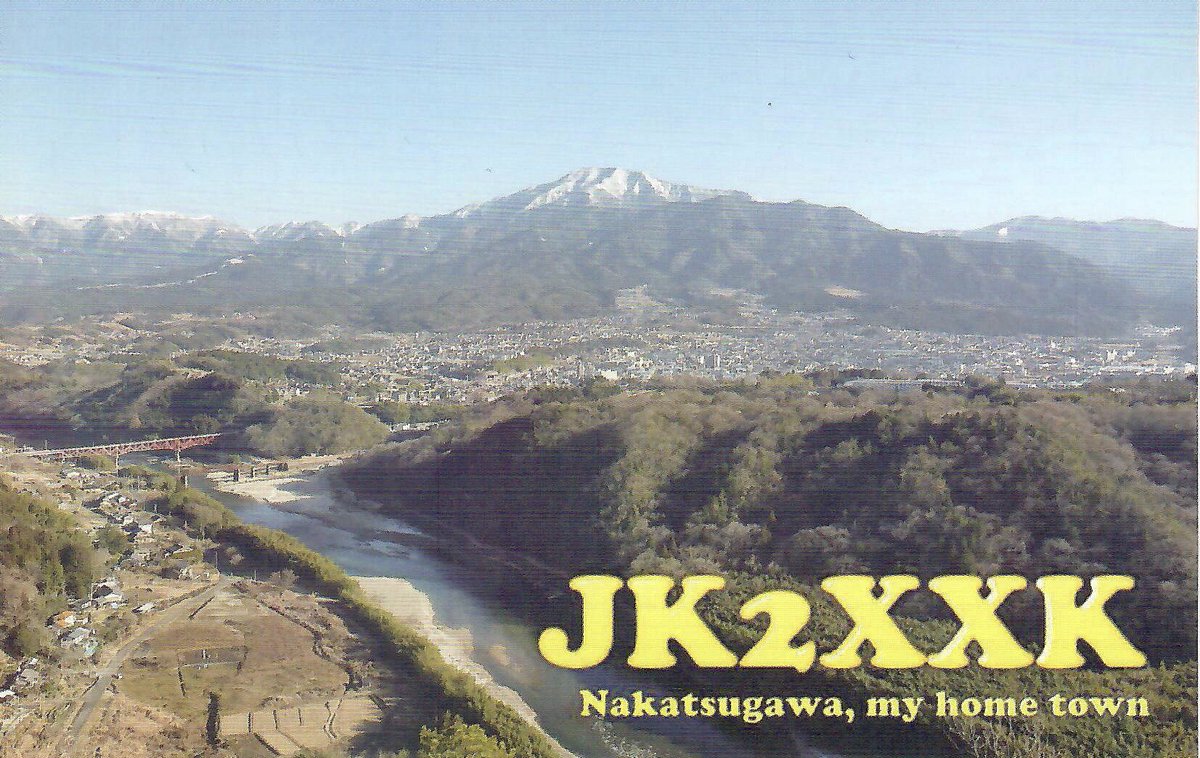
6 Jun 2025
HADES-ICM (SO-125) 🛰️FM repeater is now on!
First QSO with JK2XXK @kikori1906 ! Nice QSO!
#HamRadio #amsat
@AmsatSpain
1
1
4
599
Han Zhang retweeted

9 May 2025
28 years after our OMs finished the first EME QSOs in China…
We BY1QH gets a fixed EME array again! And this time… a 144/432 “2-bander”!

4
9
86
2,891
12 Feb 2025
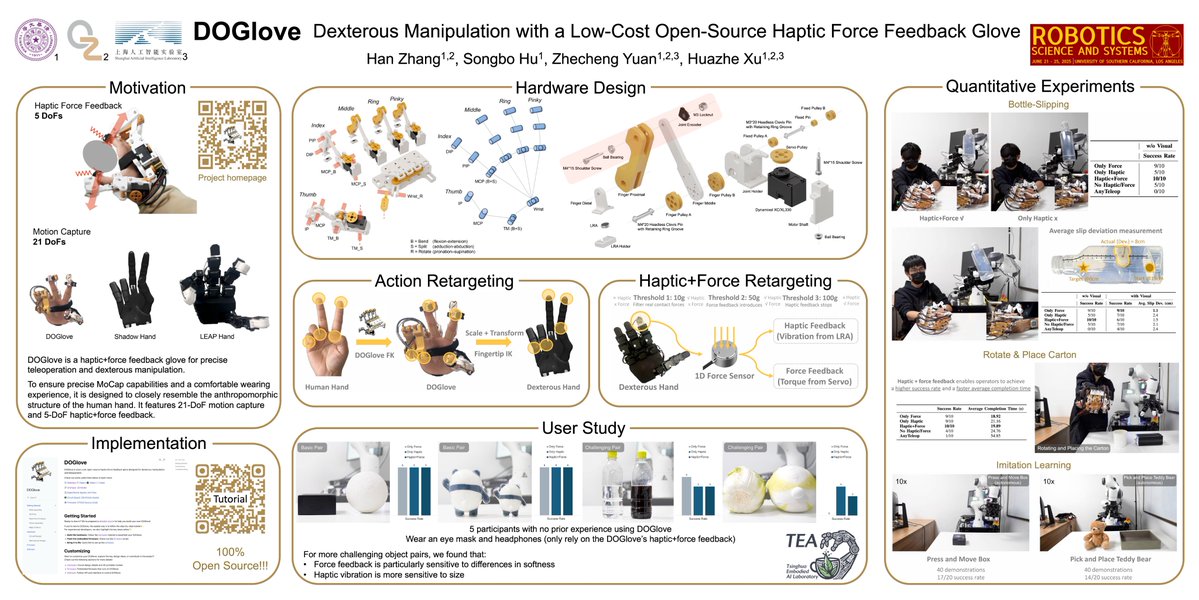
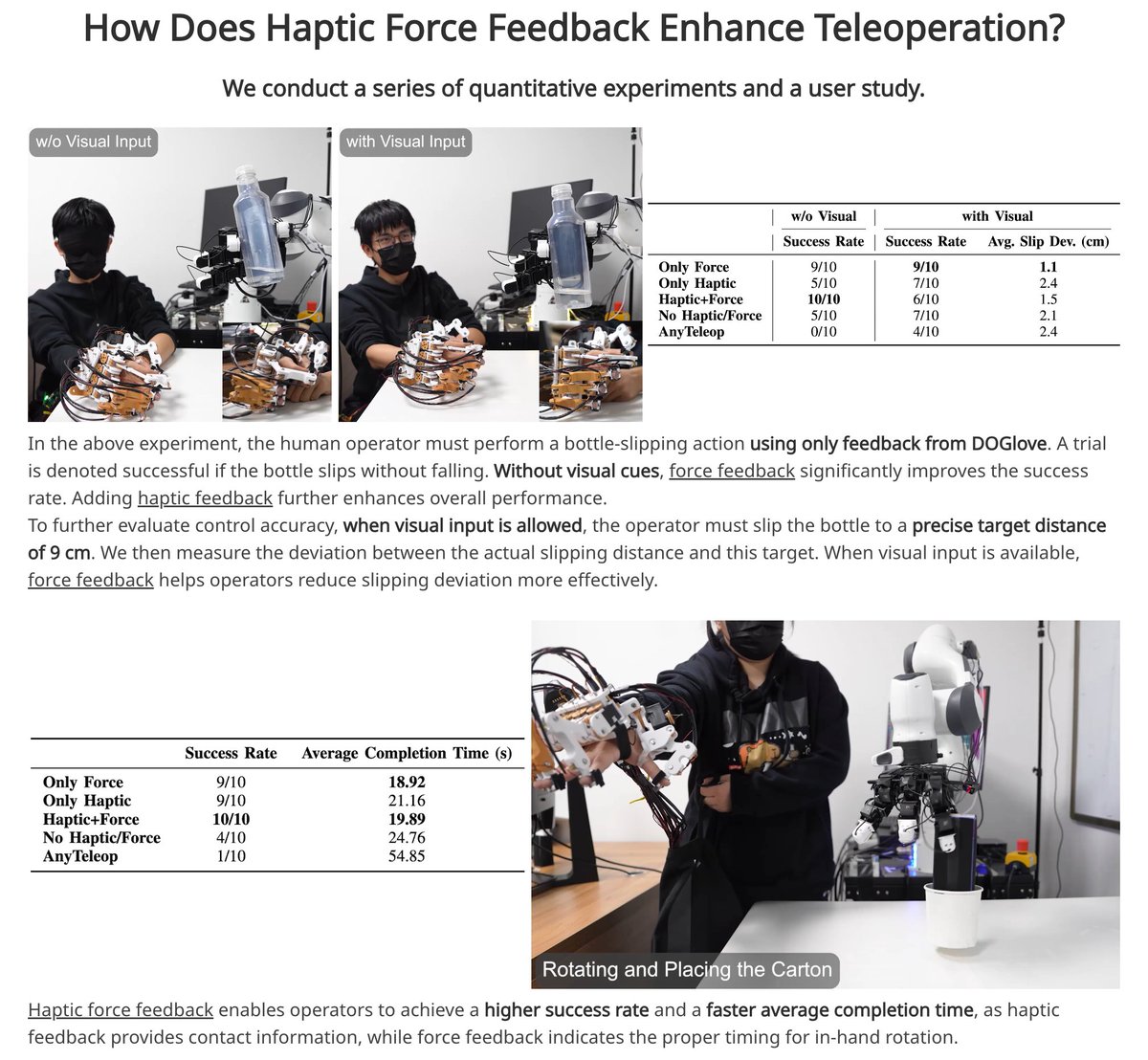
Want a haptic force feedback glove?
Meet DOGlove! 🖐✨ A precise, low-cost (~$600), open-source glove for dexterous manipulation. Teleoperate a dexterous hand to squeeze condensed milk on bread 🥪 or collect high-quality data for imitation learning.
Check it out! 🎥👇
do-glove.github.io/
5
31
178
22,626
12 Feb 2025
Huge thanks to my awesome collaborators Songbo Hu & Zhecheng Yuan (@fancy_yzc )! 🙌
And a deep gratitude to my incredible advisor Huazhe Xu (@HarryXu12 ), not only for his invaluable advice but also for kindly sharing his office for our experiments! 😆
1
2
739
12 Feb 2025
📜 Paper: arxiv.org/abs/2502.07730
🌍 Website: do-glove.github.io/
📽️ Full video: youtu.be/2qO7dbH9zxc
We’re cleaning up the project and scripts. DOGlove will be entirely open-source soon, with full documentation. Stay tuned! 🚀
1
2
1,109