
Neuroscience. Brain connectivity and plasticity 🧠
- Tweets 710
- Following 496
- Followers 179
- Likes 588

















ALT This shows two statue heads.











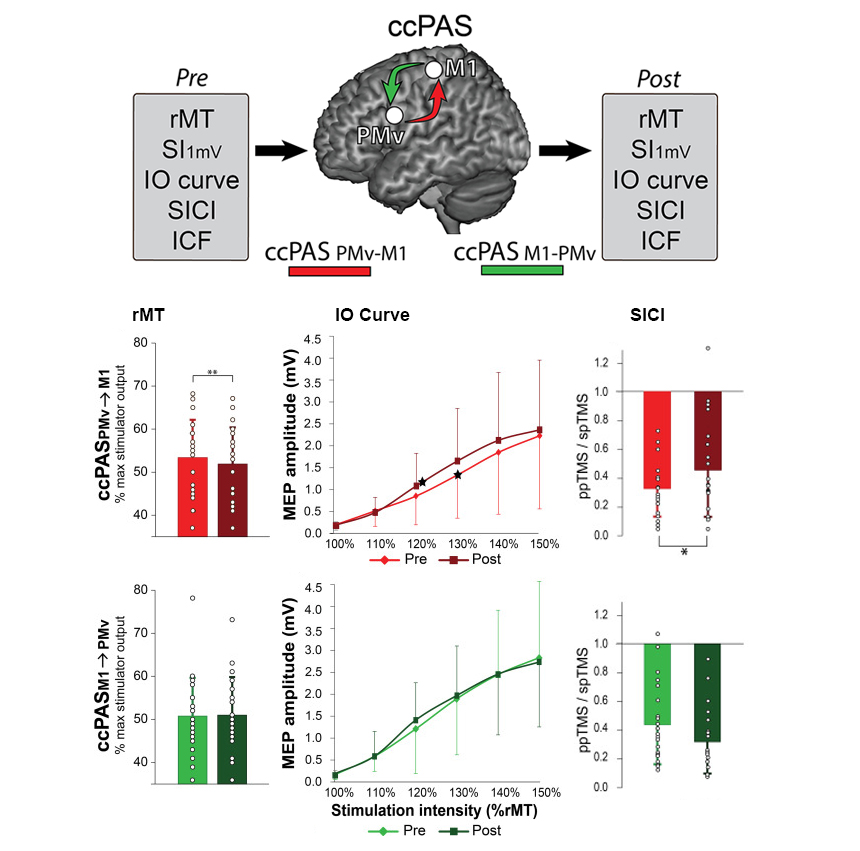
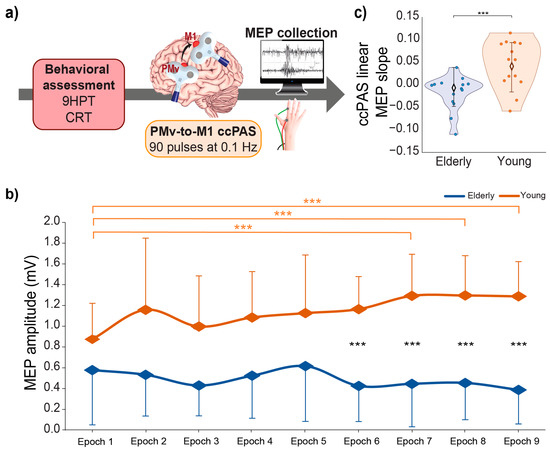
ALT Following PMv-to-M1 ccPAS, the threshold for inducing MEPs decreased, and the input-output curve (IO) slope increased, highlighting increased M1 corticospinal excitability. Moreover, ccPAS reduced the magnitude of short-interval intracortical inhibition (SICI), reflecting suppression of GABA-ergic interneuronal mechanisms within M1. These changes were specific to ccPAS Hebbian strengthening of PMv-to-M1 connectivity, as no modulations were observed when reversing the order of the PMv-M1 stimulation during a control ccPAS protocol. These findings expand prior ccPAS research that focused on the malleability of cortico-cortical connectivity at the network-level, and highlight local changes in the area of convergent activation (i.e., M1) during plasticity induction.



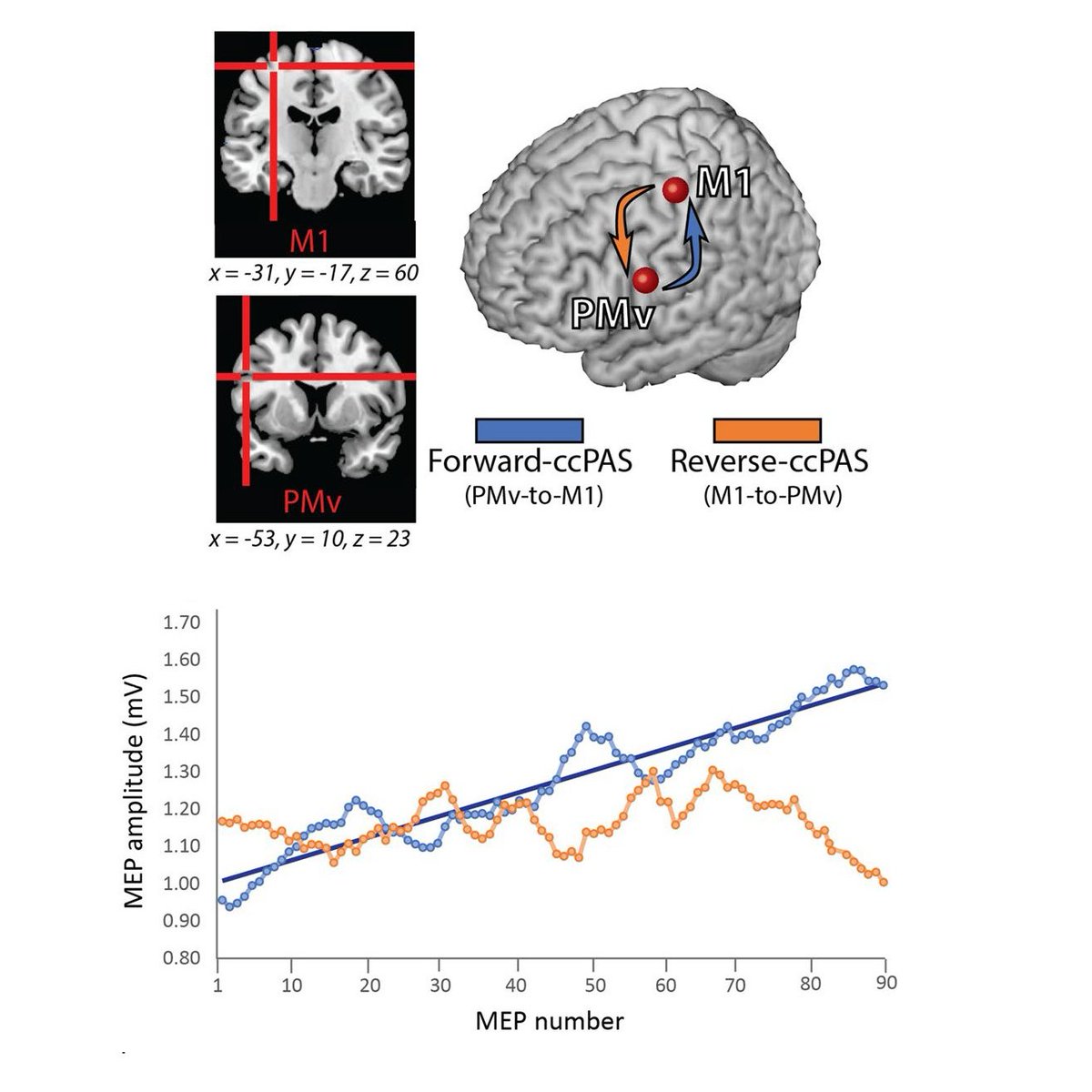
ALT We administered cortico-cortical paired associative stimulation (ccPAS) over the ventral premotor cortex (PMv) and primary motor cortex (M1) either to reiforce PMv-to-M1 projections (Forward-ccPAS) or to weaken them (Reverse-ccPAS). On each paired‑pulse, we recorded a motor‑evoked potential (MEP) to continuously trace the emergence of corticomotor changes. Forward‑ccPAS induced a gradual and linear increase in MEP size that did not reach a plateau at the end of the protocol and was greater in participants with lower motor threshold. Participants receiving reverse‑ccPAS showed a trend toward inhibition. Our study highlights the facilitatory and inhibitory modulations that occur during ccPAS administration and suggest that online MEP monitoring could provide insights into the malleability of the motor system and protocol’s effectiveness. Our findings open interesting prospects about ccPAS potential optimization in experimental and clinical settings.