
Forma Robotics is creating the world's first decentralized Robotics-as-a-Service (RaaS) network - powered by a modular, open-source robotic arm.
Joined October 2025
- Tweets 178
- Following 13
- Followers 1,517
- Likes 635
60 Photos and videos









Pinned Tweet

Feb 12
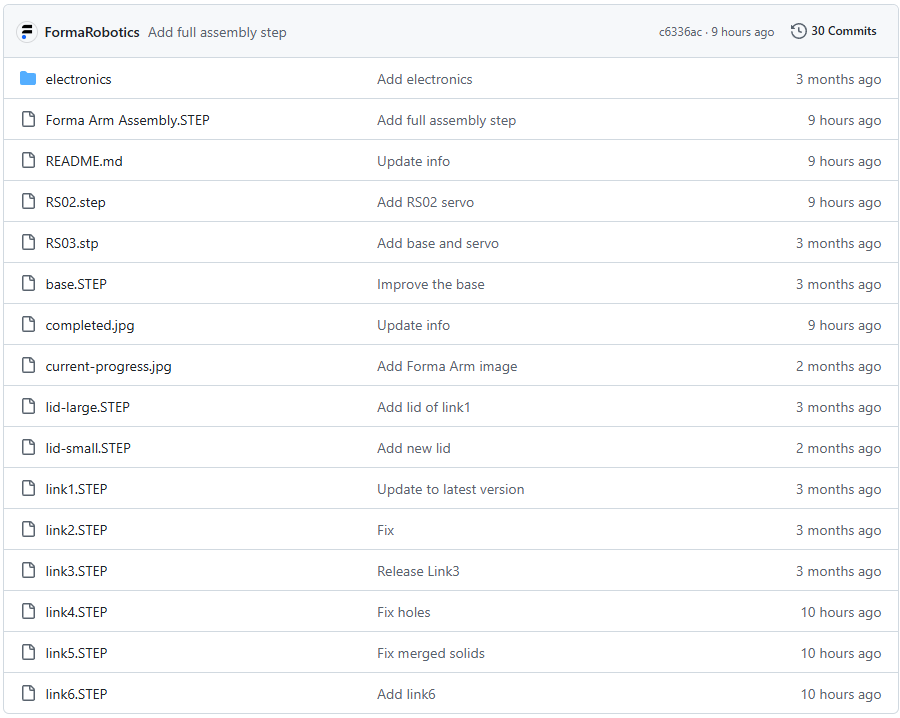
The Forma Arm is now officially live.
This is our open-source modular robotic arm - designed for real-world deployment, affordable fabrication (3D printable), and built with interchangeable joints.
The repository includes:
• Complete modular CAD files (Base Link1–Link6 servo modules)
• Circuit diagram
• Full Bill of Materials (hardware servos)
• Assembly structure ready for iteration and improvement
Everything is open for builders, researchers, students, and anyone who wants to experiment with robotics in a practical way.
🔗 GitHub Repository:
github.com/FormaRobotics/for…
This is the foundation.
We’ll continue adding electronics details, improvements, and new attachments as we progress.
34
2
61
8,096
May 13
TEEs are actually pretty interesting for FL, especially around things like secure aggregation, malicious nodes and model poisoning.
The issue is they're still fairly hard (and expensive) to implement properly at scale, especially in robotics where hardware/software environments can vary a lot.
That said, we're not really taking a TEE-focused approach at Forma right now, but there's definitely a strong crossover between TEEs, BC, and robotics.

I wonder how applicable TEEs could be for this.
I’ve used them extensively in crypto and would love to see the crossover to robotics
5
1
9
1,292
The role of data…
But privacy remains unsolved.
Federated Learning is the solution.
That's what we're working on at Forma.

RootLens lets you get paid just by doing your everyday chores.
RootLens is being built for the @colosseum Frontier Hackathon from @SuperteamJapan and @sol_hack3rs
preparing the waitlist.
7
4
19
2,427
Apr 24
Federated Learning (FL) is often framed as a privacy solution - train across distributed nodes without moving raw data.
But in practice, the real bottleneck isn’t just data locality. It’s coordination and trust.
In a multi-party FL setup:
• Who verifies that a model update is valid?
• How do you prevent poisoned or low-quality gradients?
• How are contributions measured and rewarded?
• Can you rely on a central aggregator?
This is where blockchain becomes relevant - not as a data layer, but as a coordination and verification layer.
A well-designed blockchain layer in FL can:
• enforce consensus on which updates are accepted (e.g. PBFT / PoA)
• provide immutable provenance of model contributions
• enable staking/slashing mechanisms to discourage malicious behavior
• track contribution quality (accuracy gain, loss reduction, etc.)
• remove reliance on a single trusted aggregator
Instead of “trusting” participants, you verify behavior at the protocol level.
This becomes especially important in real-world settings like manufacturing, where multiple organizations:
– operate similar machines (shared domain)
– generate comparable vision time-series data
– cannot share raw data due to constraints
FL handles the data locality.
Blockchain handles the trust, incentives, and coordination.
The interesting frontier isn’t putting models on-chain,
it’s building systems where model updates themselves become verifiable economic actions.
That’s how decentralized training starts to actually work.
$forma #FederatedLearning
1
4
12
1,456
Apr 19
$950M into industrial robotics in 48 hours. Not a trend; a thesis forming.
March 10: Rhoda AI exits stealth with a $450M Series A at a $1.7B valuation, backed by Premji Invest, Khosla, Temasek, Mayfield, and John Doerr. Their model trains robot manipulation from internet-scale video, targeting manufacturing and logistics.
March 11: Mind Robotics raises $500M at $2B, co-led by Accel and a16z. Spun out by Rivian founder RJ Scaringe. $615M raised in four months.
Industrial robotics used to be a specialist-only bet: high hardware COGS, long qualification cycles, slow enterprise adoption.
What changed is the model layer.
Physical intelligence is becoming the scaling surface - similar to where LLMs were around 2020–21. Capital is moving early, ahead of deployment curves.
The pipeline behind these rounds is likely deeper than most people think. 🚧🤖📈
4
3
19
1,458
Mar 26
We want to share a quick update with everyone.
Over the past period, we've been dealing with a few critical challenges on our side that slowed things down more than expected. That said, the project is alive, the vision hasn't changed, and work will continue.
We're currently stabilizing things internally and preparing to move forward step by step. Your patience and support genuinely mean a lot to us during this phase. 🤝
3
3
26
1,812
Forma Robotics retweeted

Mar 13
VLA models are capable generalists. But can they continually self-improve?
Such Continual Reinforcement Learning (CRL) problems are traditionally considered very challenging.
Surprisingly, we found that with the right setup, the simplest CRL recipe can work really well!
arxiv.org/abs/2603.11653
8
50
271
46,313
👏👏
Mar 5

With both TOPReward and RoboMeter now released, I’m sure people will compare them , and honestly, they’re both strong, just optimized for different goals.
For TOPReward, we’re pitching it as a general-purpose reward model that works across robotics and non-robotics. We go from an off-the-shelf VLM like Qwen-VL 3 (which, notably, wasn’t trained on robotics data) to TOPReward with no reward training, no fine-tuning, and no in-context prompting. And have fun building excited to see what people make!
But if you’re curious about a simple side-by-side between RoboMeter and TOPReward (implemented by @VilleKuosmanen), check it out 👇
20
1
21
1,714
Feb 27
Just spotted this - TOPReward is out and it’s really cool!
Pull reward signals straight from token probabilities instead of building or tuning a reward model. It was just released and feels like a real shortcut around per-task reward engineering.
In the context of Forma RaaS this is huge - as long as the VLM understands the task, we can score it zero-shot without writing a reward for every job.
Faster experiments, less engineering, and a cleaner path to deployable task evaluation.
Feb 26
Instead of asking a VLM to output progress, it reads the model’s internal belief directly from token logits. No in-context learning. No fine-tuning. No reward training. 📈
We introduce: TOPReward, a zero-shot reward modeling approach for robotics using token probabilities from pretrained video VLMs.
The simplest way of doing reward modelling for robotics!
Project: topreward.github.io/webpage/
🧵👇
49
2
62
2,499
Feb 21
Control Stack for Decentralized Robotics 🧠
We’re building a lightweight control layer that:
• Handles real-time joint motion and safety
• Syncs telemetry on-chain for proof of work & uptime
• Collects data for Machine Learning usage privately
• Orchestrates tasks through smart contracts and payments
Each robotic arm becomes a verifiable service node - the physical equivalent of a validator, earning for performing real-world actions.
28
4
49
1,802
Feb 17
At Forma Robotics, we're architecting the complementary layer for exactly this era. Our decentralized Robotics-as-a-Service (RaaS) network - built around the newly live open-source Forma Arm (modular, 3D-printable, interchangeable joints, open-source) - turns individual builders, labs, and operators into permissionless nodes in a global embodied compute and data commons.
Key synergies with XR-0-style advances:
- Data scarcity → abundance flywheel - Internet video pretraining unlocks initial generalization (as Xiaomi proves), but true robustness demands diverse, task-specific, real-world embodied rollouts. Forma's network crowdsources this at planetary scale: thousands of heterogeneous Forma Arms (and compatible modular embodiments) execute community-defined tasks, generating cryptographically attested trajectories, failure cases, proprioceptive logs, and multi-view videos - all contributed on-chain.
- Tokenized incentives & value capture - Node operators earn $FORMA rewards for uptime, high-quality data contribution (e g., novel manipulation episodes for fine-tuning VLAs), distributed inference/compute (policy rollouts, sim augmentations), and task fulfillment. This creates economic pressure for continuous improvement and data diversity far beyond centralized silos.
- Decentralized fine-tuning & deployment - XR-0-like VLAs can be hosted/distilled across the network: aggregate on-chain trajectories feed LoRA-style or full fine-tuning runs (via distributed compute), then push updated weights/policies back to nodes. Standardized modular interfaces (kinematics, actuators, sensors) enable cross-embodiment transfer, so a policy learned on one arm variant generalizes across the fleet.
- From engineered → learned, centralized → permissionless - We're accelerating the structural shift: robotics as a software-defined, tokenized service layer. No gatekeepers. Community-owned hardware blueprints open foundation models crypto-native payments verifiable data provenance = an infinitely scalable, censorship-resistant embodiment economy.
Watch this space. The embodied AI wave is no longer hypothetical - it's open-sourced, decentralized, and compounding.
#RaaS #VLA #FormaArm
Feb 16

Humanoid robotics is entering a new phase:
Xiaomi Robotics 0 (XR-0) explores learning manipulation directly from large-scale human videos — aligning video understanding with robot embodiment to generate executable actions.
Watch humans->learn representations ->map to robot control.
Robot data is scarce.
Internet video is not.
If video pretraining transfers reliably into embodied control, the scaling law of robotics changes. Deployment speed becomes a function of model alignment, not just hardware iteration.
We’re moving from engineered skills to learned behavior.
That’s a structural shift.
project: xiaomi-robotics-0.github.io/
8
2
21
1,540
Feb 12
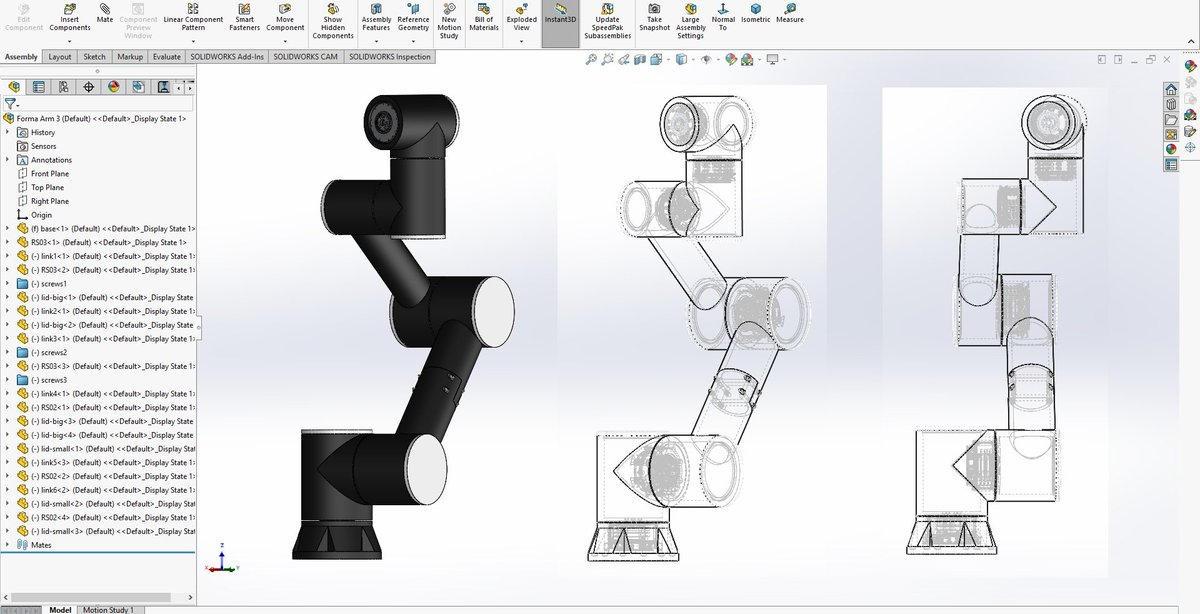
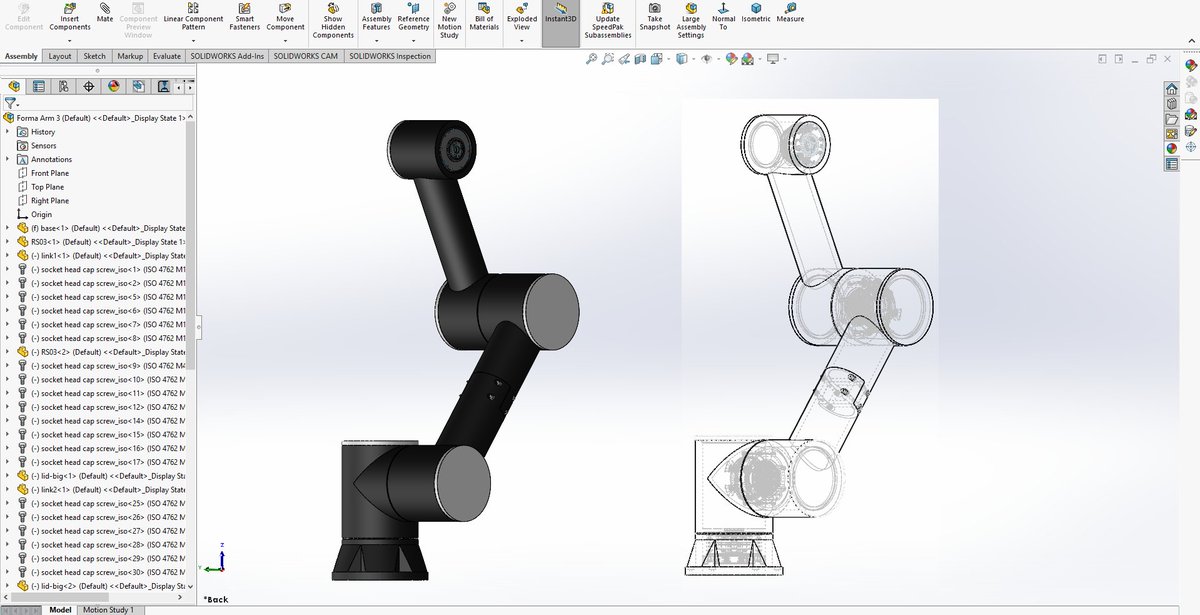
In collaboration with @tnkrdotai, you can now view the Forma Arm directly in your browser.
Open it, explore the full design, inspect the structure - no downloads, no setup required.
Making robotics accessible, interactive, and easy to explore.
Feb 12

The Forma Arm is now officially live.
This is our open-source modular robotic arm - designed for real-world deployment, affordable fabrication (3D printable), and built with interchangeable joints.
The repository includes:
• Complete modular CAD files (Base Link1–Link6 servo modules)
• Circuit diagram
• Full Bill of Materials (hardware servos)
• Assembly structure ready for iteration and improvement
Everything is open for builders, researchers, students, and anyone who wants to experiment with robotics in a practical way.
🔗 GitHub Repository:
github.com/FormaRobotics/for…
This is the foundation.
We’ll continue adding electronics details, improvements, and new attachments as we progress.
1
6
22
1,268
Feb 12
The Forma Arm is now officially live.
This is our open-source modular robotic arm - designed for real-world deployment, affordable fabrication (3D printable), and built with interchangeable joints.
The repository includes:
• Complete modular CAD files (Base Link1–Link6 servo modules)
• Circuit diagram
• Full Bill of Materials (hardware servos)
• Assembly structure ready for iteration and improvement
Everything is open for builders, researchers, students, and anyone who wants to experiment with robotics in a practical way.
🔗 GitHub Repository:
github.com/FormaRobotics/for…
This is the foundation.
We’ll continue adding electronics details, improvements, and new attachments as we progress.
34
2
61
8,096
Feb 12
You can access and download all parts directly from the repository.
2
13
489
Feb 12
We're working closely with @tnkrdotai to make the release happen today.
Final touches underway.
Next week, we’re releasing the Forma Arm in collaboration with @tnkrdotai.
This is not just a release, it’s the beginning of something builders can explore, extend, and build on.
More details very soon.
3
7
21
1,089
Next week, we’re releasing the Forma Arm in collaboration with @tnkrdotai.
This is not just a release, it’s the beginning of something builders can explore, extend, and build on.
More details very soon.
3
8
34
4,112
Notice the smaller (3D printed) arms.
That's the same reason we are working on Forma Nova.

👩🏭:I came, I left, I came, I left, I came, I left...
🤖 During training, operators can use Lite-T teleoperation device to instantly take over the robot or exit model execution at any time, enabling smooth human intervention and reliable real-world data collection.
More controllable training, more efficient data acquisition. #Robotics #model #physicalai
3
15
1,185
True
Feb 2

i was visiting a hackathon where 80 participants were training pi0/0.5, gr00t, smolvla, ACT, DP, etc. on lerobot arms
the best and most sample efficient policies were trained *from scratch*
we still do not have an open source x-embodied GPT-2, but i'm hopeful for this year
2
2
7
1,108