Researching at the frontier of AI on topics of Computer Vision, Computer Graphics, Robotics, Embodied AI, and Reinforcement Learning @UCSanDiego @haosu_twitr
Joined May 2021
- Tweets 144
- Following 212
- Followers 3,029
- Likes 225
39 Photos and videos





Hao Su Lab retweeted

28 Oct 2025
VLA models often forget their pretrained knowledge during action training, hurting generalization.
🤖Our framework unifies action & VLM training to preserve strong pretrained representations & maintain versatility, boosting generalization & robustness.
gen-vla.github.io
2
7
38
5,105

We presented our work on studying multi-embodiment scaling at #CoRL2025 and were thrilled by the excitement around generalist cross-embodiment policies. A common question was: Will you move beyond locomotion? The answer is YES! Locomotion provides a clean starting point, but our long-term goal is to extend these ideas to more challenging domains such as manipulation, paving the way toward general cross-embodiment intelligence.
Huge thanks to the amazing team for making this happen across three time zones: project co-leads @LiuDai_DL, @NicoBohlinger, Dichen Li, together with @tongzhou_mu, @ZhanxinWu0725, K. Fay, and advisors @hiskov, @Jan_R_Peters, @haosu_twitr.


🧠 Can a single robot policy control many, even unseen, robot bodies?
We scaled training to 1000 embodiments and found: More training bodies → better generalization to unseen ones.
We call it: Embodiment Scaling Laws.
A new axis for scaling.
🔗 embodiment-scaling-laws.gith…
🧵👇
13
51
10,434
Tongxuan’s work explores using generative models (diffusion) for state estimation and world model learning in cloth manipulation, a domain with significant visual occlusion and complex dynamics. He will give a 5-minute talk at 2:00 pm in the Simulating Robot Worlds workshop today (simulatingrobotworlds.github…), and a 1-minute spotlight presentation from 3:00–3:30 pm on Sep 28 at #CoRL.
26 Sep 2025

How to capture complex environment dynamics accurately with partial observations for world modeling? 🧐 Thrilled to share our recent work on world models for robotic manipulation - UniClothDiff: Diffusion Dynamics Models with Generative State Estimation for Cloth Manipulation, accepted to #CoRL2025 🎉.
We target on the challenging task of cloth manipulation, which involves partial observability due to severe self-occlusion, a high-dimensional state space, and highly non-linear dynamics. We enable robots, like humans, imagine the state of cloth through a mental model 🧠 and foresee its future state during folding!
🔗 uniclothdiff.github.io
📜 arxiv.org/abs/2503.11999
6
37
4,981
Hao Su Lab retweeted

5 Mar 2025
🤖Introducing DEMO3: our new model-based RL framework for multi-stage robotic manipulation from visual inputs and sparse rewards. 🧵🔽
📜 Paper: [arxiv.org/abs/2503.01837]
🌍 Project Page: [adrialopezescoriza.github.io…]
💻 Code: [github.com/adrialopezescoriz…]

2
20
143
25,770
Hao Su Lab retweeted

19 Dec 2024
📢 Introducing ManiSkill-HAB: A benchmark for low-level manipulation in home rearrangement tasks!
- GPU-accelerated simulation
- Extensive RL/IL baselines
- Vision-based, whole-body control robot dataset
All open-sourced: arth-shukla.github.io/mshab
🧵(1/5)
7
50
215
48,938
Hao Su Lab retweeted

12 Dec 2024
Learning bimanual, contact-rich robot manipulation policies that generalize over diverse objects has long been a challenge.
Excited to share our work: Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual Manipulation!
glide-manip.github.io
🧵1/n
1
19
74
20,877
Hao Su Lab retweeted
5 Nov 2024
SIMPLER will be presented at #CoRL2024 at 4pm on Nov 8 (Section 4)!
While I won't be in person due to visa constraints, @xiao_ted, @KarlPertsch, and @oier_mees will be presenting the paper and are happy to chat about it in person!
9 May 2024

Scalable, reproducible, and reliable robotic evaluation remains an open challenge, especially in the age of generalist robot foundation models. Can *simulation* effectively predict *real-world* robot policy performance & behavior?
Presenting SIMPLER!👇
simpler-env.github.io/
5
30
5,765
Hao Su Lab retweeted

2 Oct 2024
We now have an initial ManiSkill3 paper out on arXiv which you can cite, just in time for the ICLR submission deadline 😁
arxiv.org/abs/2410.00425
23 Sep 2024

for anyone using ManiSkill 3 in their research / upcoming conference deadlines, we will have a v1 preprint out some time week so you cite it! A v2 version with more experiments (mostly just running baselines data collection atm) will come out later
2
5
42
5,212
Hao Su Lab retweeted

20 Aug 2024
🚀 Thrilled to announce the release of the reproduced MeshLRM demo! 🎉 Generate textured 3D meshes from one or more unposed images in seconds. Check it out: huggingface.co/spaces/sudo-a…
15
48
10,678
Hao Su Lab retweeted

26 Jun 2024
While the Segment Anything Model (SAM) greatly improves 2D segmentation annotation efficiency, is there a foundation model that works for 3D point clouds and meshes like SAM?
Introducing Point-SAM, a 3D prompt segmentation foundation model! 👇
point-sam.github.io
4
21
108
15,731
Hao Su Lab retweeted

13 Jun 2024
Join us at our first workshop on 3D Foundation Models @CVPR2024, June 18 in Summit 434, starting at 8:50AM!
We have fantastic speakers to discuss the progress and prospects in 3D foundation models.
Check out more details at 3dfm.github.io/

1
9
90
17,157
Hao Su Lab retweeted

29 May 2024
🥳Excited to share: Hierarchical World Models as Visual Whole-Body Humanoid Controllers
Joint work with @jyothir_s_v @vlad_is_ai @ylecun @xiaolonw @haosu_twitr
Our method, Puppeteer, learns high-dim humanoid policies that look natural, in an entirely data-driven way!
🧵👇(1/n)
11
62
376
250,912
Hao Su Lab retweeted
15 May 2024
#ICRA2024 @LinghaoChen97 will present our differentiable rendering-based hand-eye calibration method, EasyHec!
May 16 13:30@CC-313 (oral); May 16 16:30-18:00@ThBT03.01 (poster)
It produces accurate calibration results in a fully automatic manner!
ootts.github.io/easyhec/@Lin…
2 May 2023

Hand-eye calibration is critical for sim2real in robotics.
We propose EasyHeC, a differentiable-rendering-based hand-eye calibration system that is highly accurate, automatic, & convenient, thus significantly reducing sim2real gap in object manipulation!
ootts.github.io/easyhec/
4
32
7,013
Hao Su Lab retweeted
9 May 2024
Don’t have a real robot/setup but want to evaluate policies trained on real world datasets? Check out SIMPLER, fast, safe, and reliable evaluation of real robot policies in sim via ManiSkill 2. The ManiSkill 3 beta will port SIMPLER over soon so stay tuned!
9 May 2024
Scalable, reproducible, and reliable robotic evaluation remains an open challenge, especially in the age of generalist robot foundation models. Can *simulation* effectively predict *real-world* robot policy performance & behavior?
Presenting SIMPLER!👇
simpler-env.github.io/
2
6
58
19,939
Hao Su Lab retweeted
9 May 2024
Scalable, reproducible, and reliable robotic evaluation remains an open challenge, especially in the age of generalist robot foundation models. Can *simulation* effectively predict *real-world* robot policy performance & behavior?
Presenting SIMPLER!👇
simpler-env.github.io/
5
24
135
86,338

6 May 2024
6 May 2024

LeRobot also features the Diffusion Policy, a powerful imitation learning algorithm, and TDMPC, a reinforcement learning method that includes a world model, continuously learning from its interactions with the environment.
diffusion-policy.cs.columbia…
yunhaifeng.com/FOWM
1
19
2,506
Hao Su Lab retweeted
2 May 2024
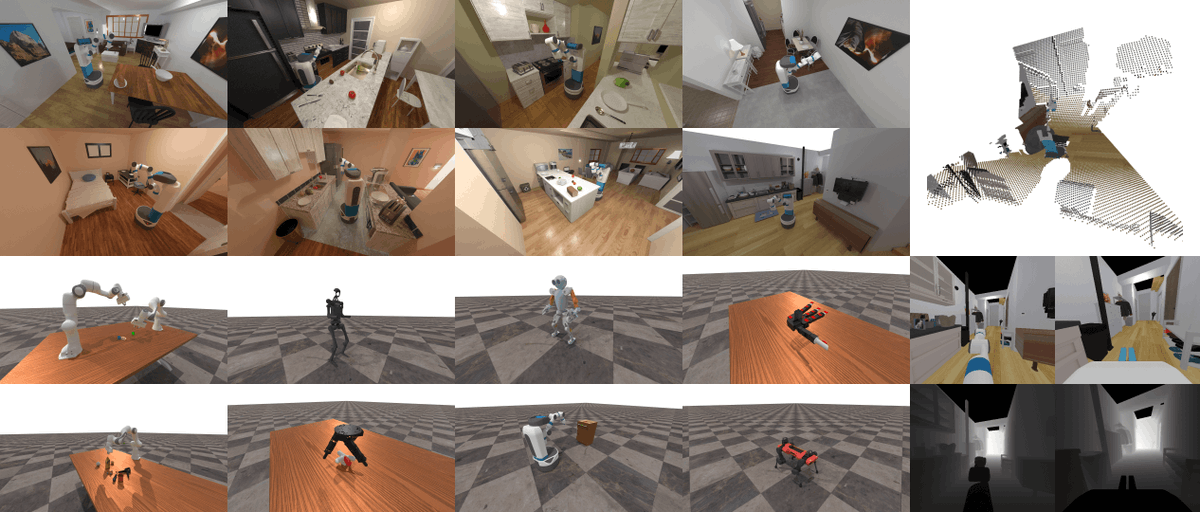
📢 ManiSkill 3 beta is out! Simulate everything everywhere all at once 🥯
- 18K RGBD FPS on 1 GPU, 3K on Colab!
- Diverse parallel GPU sim
- Tons of new robots/tasks
All open-sourced: github.com/haosulab/ManiSkil…
Photo: MS3 Tasks w/ scenes from AI2THOR and ReplicaCAD
🧵(1/6)
9
62
260
58,883
Hao Su Lab retweeted
27 Apr 2024
maniskill sneak peak 3: lots of new robots to use! Whether its mobile manipulation, humanoids, quadrupeds, or even tactile dextrous hands (see the shadow hand at the bottom with red tactile sensors), we have a ton of new domains being added to try out on GPU state/visual sim

3
2
44
4,734
Hao Su Lab retweeted
24 Apr 2024
Checkout DG-Mesh from @Isabella__Liu, which reconstructs time-consistent, high-quality dynamic mesh with flexible topology change from monocular videos.
liuisabella.com/DG-Mesh/
24 Apr 2024

Want to obtain time-consistent dynamic mesh from monocular videos? Introducing:
Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Monocular Videos
liuisabella.com/DG-Mesh/
We reconstruct meshes with flexible topology change and build the corresp. across meshes. 🧵(1/n)
1
4
46
5,792
Hao Su Lab retweeted
19 Apr 2024
Checkout @SarahWeii 's latest work, which presents a transformer-based model that reconstructs a high-fidelity 3D mesh from 4 (sparse) input images in less than one second!
arxiv.org/abs/2404.12385
19 Apr 2024

Check our MeshLRM 🌟, which achieves state-of-the-art mesh reconstruction from sparse-view inputs within 1 second! 🚀🚀🚀
Paper: arxiv.org/abs/2404.12385
Project page: sarahweiii.github.io/meshlrm…
1
4
25
4,590