
Joined March 2016
- Tweets 1,491
- Following 1,411
- Followers 21,806
- Likes 3,990
344 Photos and videos













Pinned Tweet

May 1
Excited to share that Assured Robot Intelligence (ARI) has joined @Meta to help build the future of humanoid intelligence!
When we started ARI one year ago, our mission was clear: achieve physical AGI. Through deep customer engagements and real-world deployments, it became clear to us that serving the massive opportunity ahead requires training a truly general-purpose physical agent.
We believe this agent will be humanoid — and that scaling will come from learning directly from human experience, not teleoperation alone. Meta’s ecosystem brings together the key components needed to make this vision possible. We will be joining Meta Superintelligence Labs (MSL) to help bring personal superintelligence into the physical world.
We are incredibly grateful to the brilliant minds, robotics researchers, engineers, partners, and supporters who have worked with us on this journey. Thank you to our investors and angels, led by @aixventureshq , for believing in our mission.
This is just the beginning.

Meta Platforms Inc. has acquired Assured Robot Intelligence, a startup developing artificial intelligence models for robots, as part of a major initiative to build humanoid technology. bloomberg.com/news/articles/…
113
59
697
198,649
Xiaolong Wang retweeted

May 1
Excited to share that ARI (Assured Robot Intelligence) is joining @Meta!
When we co-founded ARI a year ago, the mission was clear: build humanoid intelligence for the real world.
Joining Meta Superintelligence Labs (MSL), we'll continue advancing frontier robotics models toward physical superintelligence in the physical world.
Huge thanks to my co-founders, the incredible ARI team, and our investors led by @aixventureshq for backing this from day one.
This is just the beginning.
Meta Platforms Inc. has acquired Assured Robot Intelligence, a startup developing artificial intelligence models for robots, as part of a major initiative to build humanoid technology. bloomberg.com/news/articles/…
27
13
257
20,540
Xiaolong Wang retweeted

May 1
welcome Assured Robot Intelligence (ARI) to MSL!
excited to build physical with @LerrelPinto @xiaolonw and the whole team!
May 1

Excited to share that Assured Robot Intelligence (ARI) has joined @Meta to help build the future of humanoid intelligence!
When we started ARI one year ago, our mission was clear: achieve physical AGI. Through deep customer engagements and real-world deployments, it became clear to us that serving the massive opportunity ahead requires training a truly general-purpose physical agent.
We believe this agent will be humanoid — and that scaling will come from learning directly from human experience, not teleoperation alone. Meta’s ecosystem brings together the key components needed to make this vision possible. We will be joining Meta Superintelligence Labs (MSL) to help bring personal superintelligence into the physical world.
We are incredibly grateful to the brilliant minds, robotics researchers, engineers, partners, and supporters who have worked with us on this journey. Thank you to our investors and angels, led by @aixventureshq , for believing in our mission.
This is just the beginning.
20
43
597
95,845
Xiaolong Wang retweeted

May 1
ARI is joining @Meta!
Over the past year, we have been building ARI (Assured Robot Intelligence) with the mission to build industry-grade physical AI for humanoids. The ARI stack is built on human experience, condensed into actionable tokens that can be rapidly adapted to real-world hardware.
But the most rewarding part of ARI has been the people. I feel truly blessed to have worked alongside some of the world's best roboticists, a top-notch investor pool led by @aixventureshq, and the many supporters pushing for us behind the scenes.
Starting next week, ARI will join the Meta Superintelligence Labs (MSL) to continue advancing frontier robotics models that advance personal superintelligence in the physical world. We have the potential to transform AI that can think and talk to AI that can do, assisting humans safely and reliably in the physical world.
To the many people behind the scenes who supported us: Thank you! This is just the beginning.
More in the Bloomberg article:
Meta Platforms Inc. has acquired Assured Robot Intelligence, a startup developing artificial intelligence models for robots, as part of a major initiative to build humanoid technology. bloomberg.com/news/articles/…
36
38
370
54,882
Xiaolong Wang retweeted

Apr 21
Excited to share that I've been selected as a 2026 Apple Scholar in AIML🎉 Huge thanks to my advisor @xiaolonw , and to all my mentors and collaborators for their support. Grateful to @Apple for recognizing and supporting my research🍎
machinelearning.apple.com/up…
9
3
82
8,154
Xiaolong Wang retweeted

Mar 25
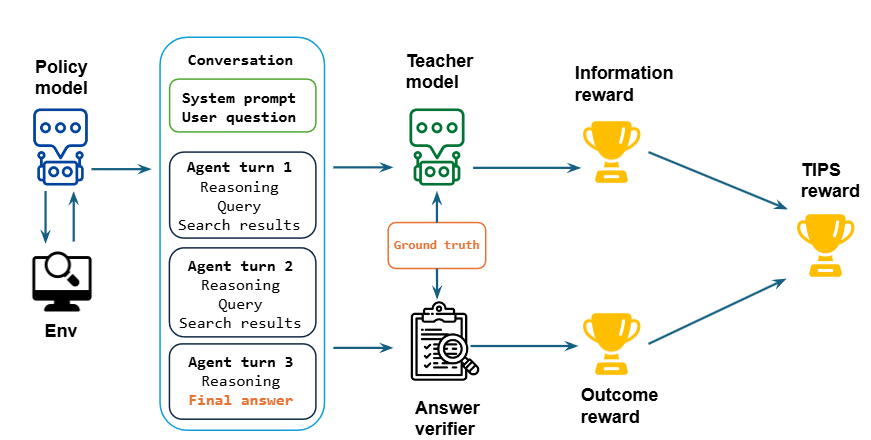
🧐 We introduce TIPS: turn-level information reward shaping for tool-using LLMs.
RL for agentic tasks suffers from high-variance credit assignment, especially in long-horizon tool-use settings.
👉TIPS assigns turn-level rewards based on how much each turn increases the likelihood of the correct answer — with no reward model, no human process labels, and policy-invariant shaping via PBRS.
Across 8 QA benchmarks, TIPS outperforms PPO and other reward-shaping baselines, with strong gains on multi-hop and out-of-domain QA.
More details in our ICLR 2026 paper:
Arxiv: arxiv.org/abs/2603.22293
2
2
12
2,614
Mar 23
We scale from one institution to multiple institutions, and eventually, the whole world will be collecting data.
Mar 23

Introducing EgoVerse: an ecosystem for robot learning from egocentric human data.
Built and tested by 4 research labs 3 industry partners, EgoVerse enables both science and scaling
1300 hrs, 240 scenes, 2000 tasks, and growing
Dataset design, findings, and ecosystem 🧵
6
10
62
12,890
Xiaolong Wang retweeted

Mar 12
Our Latent Encoder-Decoder code base is fully open sourced, you can train and visualize the latent space:
Code⚙️: github.com/EmptyBlueBox/DexL…
ArXiv 📚: arxiv.org/abs/2603.10158
#CVPR2026

Ever want to have a single policy to control diverse robots as well as different dexterous hands, or to observe the emergent behavior under cross embodiment training?
Introducing our #CVPR2026 paper XL-VLA, Cross-Hand Latent Representation for Vision-Language-Action Models.
1
34
126
19,111
Mar 12
One policy that rules all the hands.
Ever want to have a single policy to control diverse robots as well as different dexterous hands, or to observe the emergent behavior under cross embodiment training?
Introducing our #CVPR2026 paper XL-VLA, Cross-Hand Latent Representation for Vision-Language-Action Models.
3
5
39
9,306
Feb 17
What an exciting time for building.
Feb 16

🤯Absolutely insane. Unitree's humanoid robot team's performance at the 2026 Spring Festival Gala
The significance of the humanoid robot's performance lies in letting 1.4 billion Chinese people know where the future lies.
1
1
34
7,479
Xiaolong Wang retweeted

Feb 12
Why buy a robot when you can build your own?
Meet YOR, our new open-source bimanual mobile manipulator robot – built for researchers and hackers alike for only ~$10k. 🧵👇
7
22
169
38,456
Xiaolong Wang retweeted

Feb 7
The paper is now available: huggingface.co/papers/2602.0…
More updates coming soon!
Jan 6

Holiday cooking finally ready to serve! 🥳
Introducing DFlash — speculative decoding with block diffusion.
🚀 6.2× lossless speedup on Qwen3-8B
⚡ 2.5× faster than EAGLE-3
Diffusion vs AR doesn’t have to be a fight.
At today’s stage:
• dLLMs = fast, highly parallel, but lossy
• AR LLMs = accurate, sequential, but slow
DFlash = diffusion drafts, AR verifies.
6
42
304
40,420
Feb 5
Learning world models from touch instead of pixels. Led by @cwj99770123 and @yswhynot
Feb 4

Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
1
7
72
11,964
Xiaolong Wang retweeted

Feb 4
Can we bridge the Sim-to-Real gap in complex manipulation without explicit system ID? 🤖
Presenting Contact-Aware Neural Dynamics — a diffusion-based framework that grounds simulation with real-world touch.
Implicit Alignment: No tedious parameter tuning.
Tactile-Driven: Captures non-smooth contact events.
Consistent: Stable predictions in contact-rich tasks.
6
50
313
49,536
Xiaolong Wang retweeted

Feb 1
1/ General-purpose robotics is the rare technological frontier where the US / China started at roughly the same time and there's no clear winner yet.
To better understand the landscape, @zoeytang_1007, @intelchentwo, @vishnuman0 and I spent the last ~8 weeks creating a deep dive on humanoid robotics hardware and flew to China to see the supply chain firsthand.
Here's everything we've created our takeaways about the components, humanoid comparisons, supply chains, and geopolitics👇
71
256
1,828
831,811
Xiaolong Wang retweeted

Jan 22
Standard AI learns to imitate.
We introduce a new framework that trains AI to make new discoveries in science engineering.
Learning-to-discover open source LM led to:
🥇best new bound on Erdos min overlap problem
🥇fastest GPU kernels
🥇better single-cell denoising
more!

15
121
734
67,242
Jan 23
TTT now beats AlphaEvolve in math problems, with a few hundred dollars and an open model.
With Test-Time Training (TTT) RL, the model continues learning on the job from its own attempts.
10
111
15,907
Xiaolong Wang retweeted

Jan 12
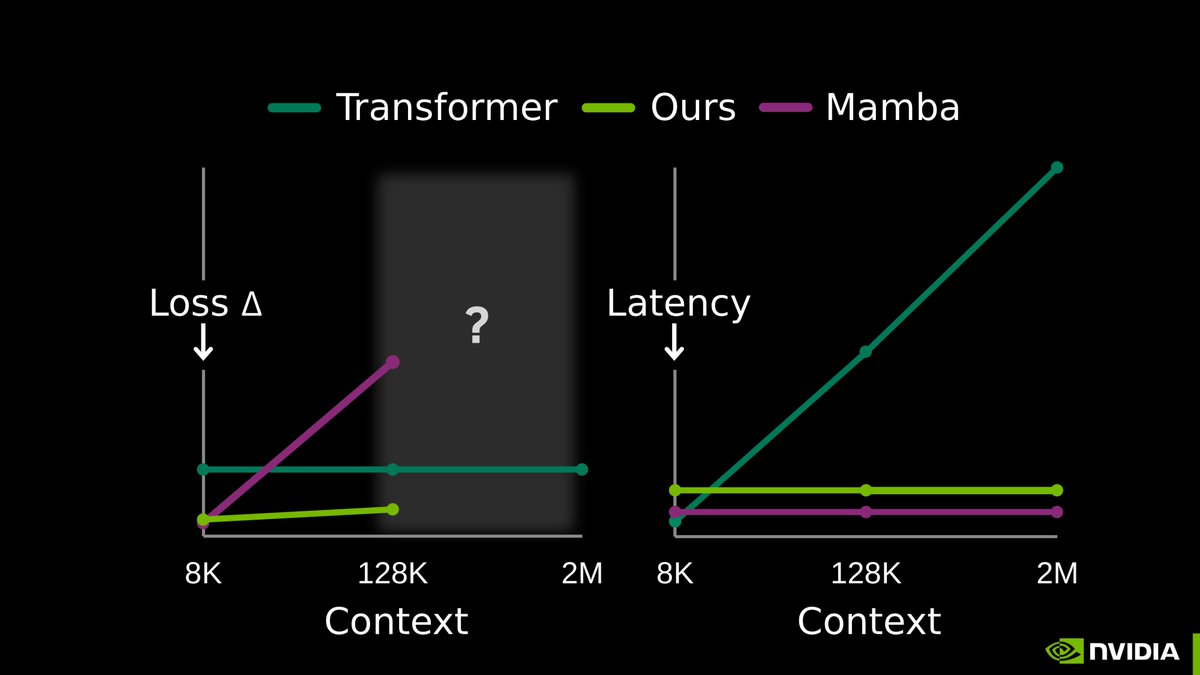
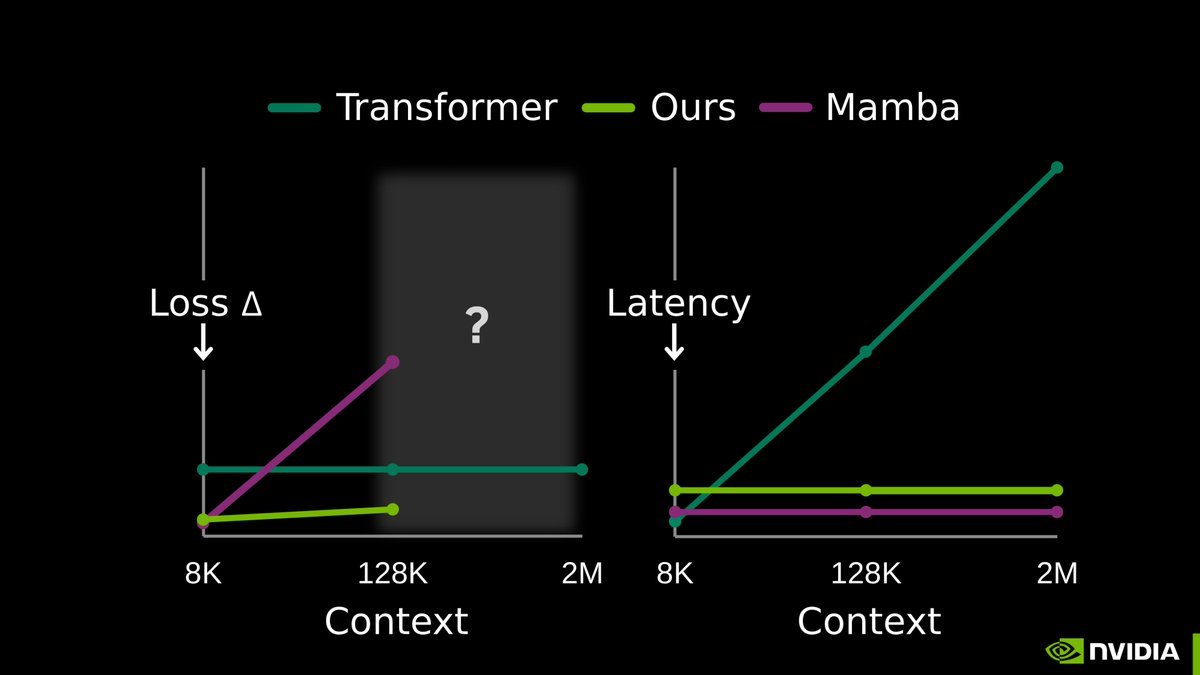
We are entering a new era for LLM memory. 🧠
In our latest research, End-to-End Test-Time Training, LLMs keep learning at test time via next-token prediction on the context – compressing what they read directly into their weights.
Learn more: nvda.ws/4sHb8na
52
178
1,506
125,784
Jan 13
After years of research, there is finally a solution to long context!
TTT-E2E is how robotics will work in the future. Humanoids ingest vision, touch, audio – almost everything humans do. It only makes sense if robot memory works like human memory: learning during deployment.
Jan 12

LLM memory is considered one of the hardest problems in AI.
All we have today are endless hacks and workarounds. But the root solution has always been right in front of us.
Next-token prediction is already an effective compressor. We don’t need a radical new architecture. The missing piece is to continue training the model at test-time, using context as training data.
Our full release of End-to-End Test-Time Training (TTT-E2E) with @NVIDIAAI, @AsteraInstitute, and @StanfordAILab is now available.
Blog: nvda.ws/4syfyMN
Arxiv: arxiv.org/abs/2512.23675
This has been over a year in the making with @arnuvtandon and an incredible team.
5
24
200
34,454