
Joined February 2025
- Tweets 488
- Following 425
- Followers 979
- Likes 537
70 Photos and videos











Pinned Tweet

Jun 11
6
1
6
882
Jun 12
Boom
Jun 11

What is the best data for training humanoid & robotics foundation models?
Pete Florence @peteflorence (CEO @Generalist, ex-Google DeepMind) dropped his live data tier list in this 7-minute clip on @tbpn:
- S-tier: Real-world robot experience (especially glove/sensor high-dexterity data)
- A/B-tier: Internet/YouTube videos. Surprisingly powerful for transfer learning (the “web data” moment for physical AI)
- B-tier: Text/common crawl (Reddit, books, etc.). Useful priors, but not enough alone
- C-tier: Motion Capture. Great for whole-body motion, weak on finger dexterity
- C or lower: Simulation / synthetic / world models. High potential, still waiting for strong real-world proof
Generalist has collected 270,000 hours of real-world manipulation data (scaling ~10k hours/week). And Pete stressed one key point:
“The quality of data is incredibly important.”
It’s not just about volume. It’s developing intuition for what actually drives performance through hands-on work.
As Physical AI scales, curated real-world and high-quality internet video looks like a winning combo.
h/t @yuji_fujima
161
Intercognitive retweeted

Jun 1
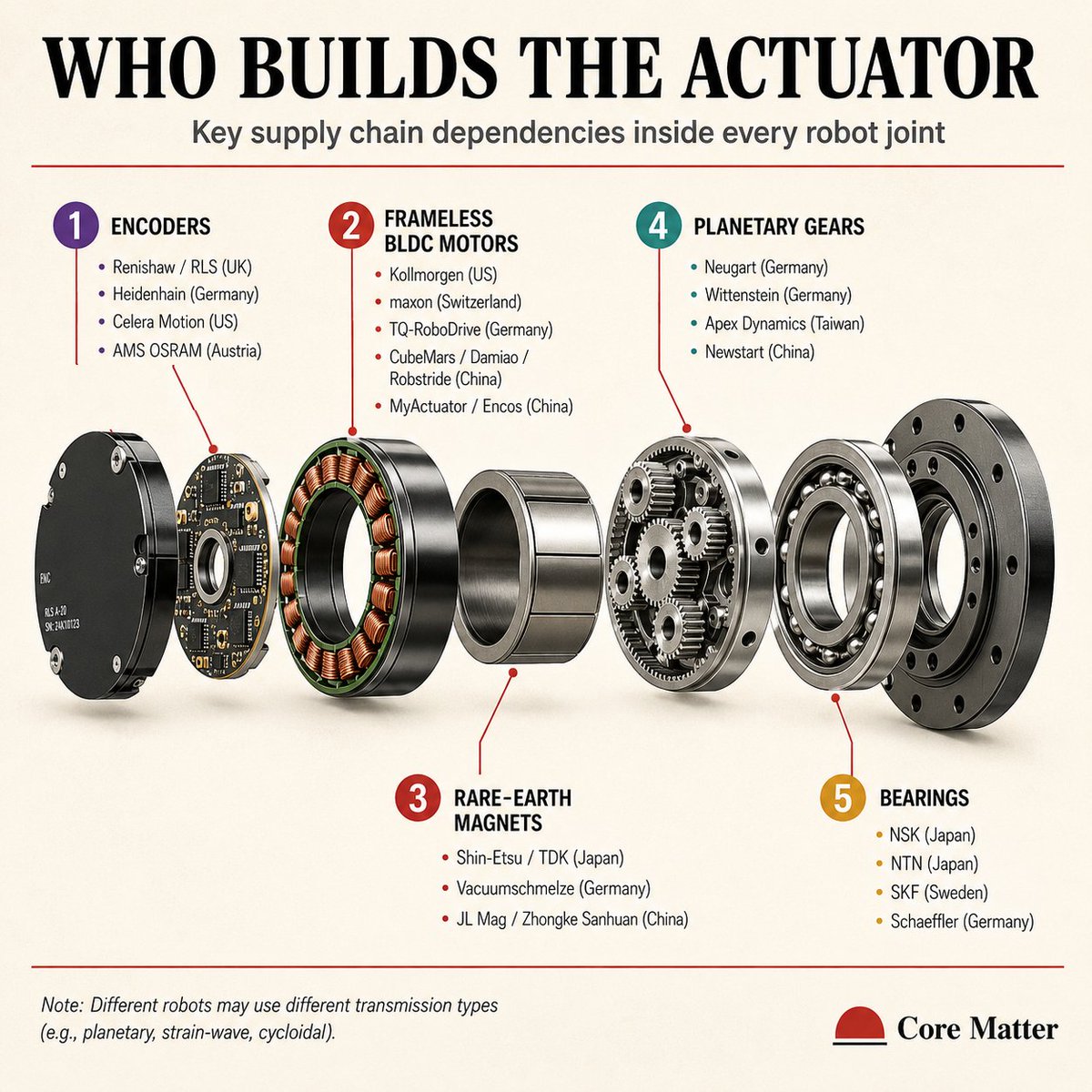
The bottleneck for mass-producing humanoids is not just AI.
It's the actuator and the supply base that sits underneath it.
Study these companies for each of the components.
- Japan dominates precision mechanical (reducers, bearings).
- Germany and Switzerland own high-end motion.
- China owns volume motors, reducers, and the upstream magnet supply.
Who am I missing?
27
79
564
39,716
Jun 11
Last chance.
@AmarSBedi (@tashiprotocol), @mikeahorton (@GEODNET) and @RichardRobinson on orchestration in the real world.
Set a reminder: x.com/i/spaces/1jGXggydjgBKZ
3
1
3
2,286
Jun 11
Eternal Sunshine of the Middle Managerless Mind
Jun 10

i hooked my whoop to my work calendar to find which coworker gives me the most stress 🚨
thanks to fable, I reverse engineered whoop to pull per minute heart rate. nd matched spikes with cal events and attendees
I now have a leaderboard and I think about it daily.
few info masked for obvious reasons ;)


2
148
Intercognitive retweeted

Jun 10
Our mission is to make it easy for anyone to deploy a robot to help them in the real world
We wrote an intuitive guide to understanding modern robotics, catered toward an audience that understands technology but not AI robotics
We hope that this short blog post embeds in you the core principles that will bring further curiosity.
35
281
2,167
313,652
Jun 10
How do drones swarm without a leader?
How does infrastructure heal itself?
How do autonomous systems fail gracefully?
@AmarSBedi of @tashiprotocol and @mikeahorton of @GEODNET join @RichardRobinson to chat orchestration in the physical world.
Join:
x.com/i/spaces/1jGXggydjgBKZ
7
3,363

Networking, inspiration, and tandoori pizza await at industry group @Intercognitive's foundation event in SF next Thursday.
If you're working on physical AI, don't miss this one!

8
39
1,432
Intercognitive retweeted

Your phone's 3-10m accuracy is fine for Google Maps.
But for a drone landing in a backyard, a car navigating, or an autonomous tractor running between crop rows?
3 meters of drift is a crash waiting to happen.
Physical AI needs @GEODNET
🧵 👇

1
6
33
3,155
Intercognitive retweeted
Jun 9
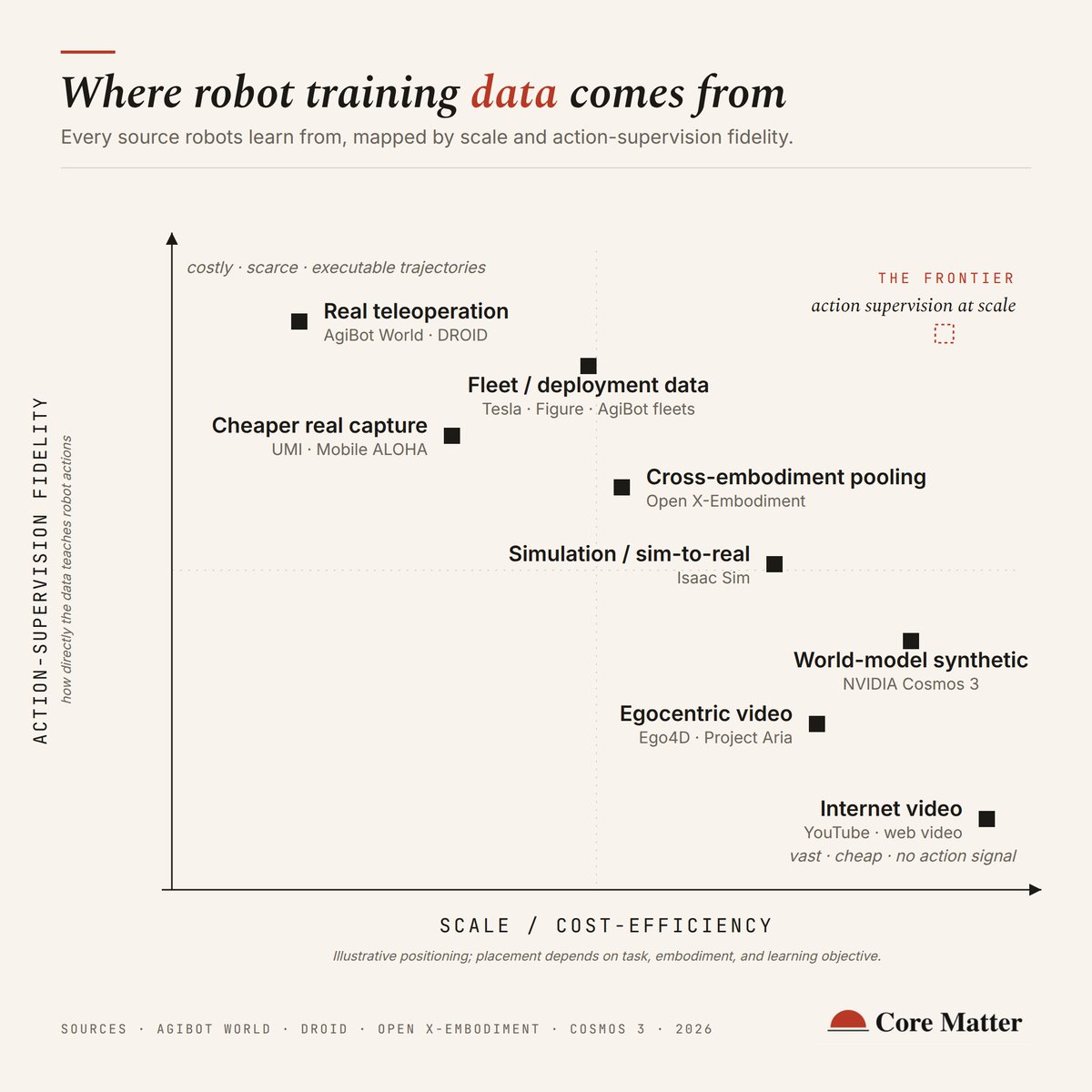
The bottleneck of frontier robotics isn’t compute, labeling, or the models themselves.
It’s data collection.
While language models scaled effortlessly on open internet text, robotics requires physical trajectories, motor torques, and tactile forces that cannot simply be scraped from a webpage.
Every token has to be fought for.
Here is a breakdown of the 7 data types shaping the industry today, each representing a trade-off between collection cost and action-label purity:
1. Real Teleoperation (AgiBot World, DROID). Collected by humans guiding hardware, it scales linearly with human hours.
2. Low-cost Capture (Mobile ALOHA, UMI handheld). It drives collection cost down while keeping real physics, though it introduces an embodiment mapping problem when transferring human hand actions to robotic joints.
3. Fleet / Deployment Data (Tesla Optimus, Figure). These are trajectories from robots already working in the field. Tesla is betting its automotive fleet infrastructure transfers to Optimus. It generates powerful, real edge cases, but requires scaled deployment.
4. Simulation (NVIDIA Isaac Sim, Genesis). While offering near-infinite scale, the sim-to-real gap still struggles to model contact-rich dynamics like slipping, twisting, friction.
5. World-Model Synthetic (NVIDIA Cosmos 3). NVIDIA just shipped Cosmos 3, which natively outputs action trajectories, not only video pixels. If a world model can accurately simulate the laws of physics natively, it reduces the need for manual teleop data drastically.
6. Egocentric video (Ego4D, Meta’s Project Aria). First-person human video captured with head-mounted rigs. Far more scalable than teleop and closer to a robot’s own viewpoint. Still carries no robot action signals on its own.
7. Internet video (Youtube, TikTok). Maximum scale, lowest cost, effectively free. It captures the widest range of objects, tasks and physical situations, but with zero action labels and (mostly) a third-person viewpoint.
Collecting data is only the step one.
The next great execution challenge is engineering a coherent training recipe that can blend these heterogeneous data sources into a single model.
30
52
409
65,058
Intercognitive retweeted

Jun 9
Talking about 2030 should be fun.

Leaderless drone swarms. Graceful failure. Self-healing infrastructure. Set a reminder to tune in for prophetic thoughts from @AmarSBedi of @tashiprotocol and @mikeahorton of @GEODNET on the shape of our machine world in 2030.
x.com/i/spaces/1jGXggydjgBKZ…
1
1
156
Intercognitive retweeted

Jun 7
15
13
57
2,451
Leaderless drone swarms. Graceful failure. Self-healing infrastructure. Set a reminder to tune in for prophetic thoughts from @AmarSBedi of @tashiprotocol and @mikeahorton of @GEODNET on the shape of our machine world in 2030.
x.com/i/spaces/1jGXggydjgBKZ…
1
2
10
2,047
From Shibuya to the world.

Full details in the Mawari docs ➡️docs.mawari.net/mawari-econo….
渋谷から世界へ。
1
108
@GEODNET was impossible to build.
$1 billion in infrastructure the market couldn’t yet support.
So @mikeahorton let the network build itself.
3
10
39
1,647
Why build the impossible when it already exists?
x.com/GEODNET/status/2063290…

Most companies spend millions and years building RTK infrastructure before serving a single customer. GEODNET gives you 21,000 stations across 170 countries—no hardware, no site negotiations, no maintenance.
On day one.
👉 Learn more here: rtk.geodnet.com/coverage/raw…

1
46
Demo: spatial compute node calculating a path for a robot.
In a future where we send robots to do our errands, venues may not want to give those visiting robots their whole map. Instead, robots will just communicate with the local spatial compute node and get a path.
5
25
92
3,601