
I don’t take profits. I just take screenshots
Joined March 2025
- Tweets 3,021
- Following 403
- Followers 452
- Likes 16,591
1,091 Photos and videos











Pinned Tweet

Jun 3
Robots need tons of real examples to learn new skills. But right now, getting good training data is slow and expensive. You usually need experts and special gear.
$COBALT changes that. It’s a simple app where anyone can use their regular phone to control robots from anywhere. Just move your phone and the robot follows. Helps collect lots of clean data fast and cheap.
I’ve been following it for a while and it’s one of the more practical ideas I’ve seen for scaling robot learning.
May 30

Robotics is still data starved. Collecting high-quality robot demonstrations remains brutally slow and expensive.
Introducing COBALT: A cloud-native teleoperation platform designed for large-scale robot learning.
We are democratizing data collection by leveraging the hardware everyone already owns: the smartphone
All you need is to download an app (today)!
Read on for more!
14
14
54
20,039
Marcel Bakery 🦖 retweeted

🧵1/ COBALT is the future of Robotics.
Built by @animesh_garg (ex-NVIDIA, Georgia Tech robotics professor), COBALT is tackling one of the biggest bottlenecks in Physical AI:
Data.
Not another robot company.
Infrastructure for robot learning.

9
6
65
279
The real bottleneck in scaling AI robotics isn’t just better models or more powerful hardware.
It’s the ability to collect high-quality, diverse robot demonstration data at scale, across many different environments and by many different operators.
Right now, most robot data is still collected in controlled labs with expensive setups. But the projects that are building cloud-based systems to turn ordinary smartphones into tools for remote robot control are quietly changing that.
By making teleoperation accessible and parallelizable, they’re creating the kind of distributed, real-world data infrastructure that generalist robots will eventually need to move beyond simulation and into everyday environments.
This layer of infrastructure might end up being more important than most people currently realize.
1
1
3
166
One of the biggest unlocks for scaling robot learning won’t just come from bigger models or better hardware.
It will come from building real infrastructure for high-quality, diverse robot demonstration data at scale, collected across many environments and by many operators.
COBALT is doing exactly that: turning everyday smartphones into a global, cloud-native teleoperation system that makes it possible to gather rich robot data without expensive setups or closed labs.
This kind of accessible, parallel data collection could become foundational infrastructure for the next phase of robotics.
cobalt-teleop.github.io
10
5
151
6,618
Jun 13
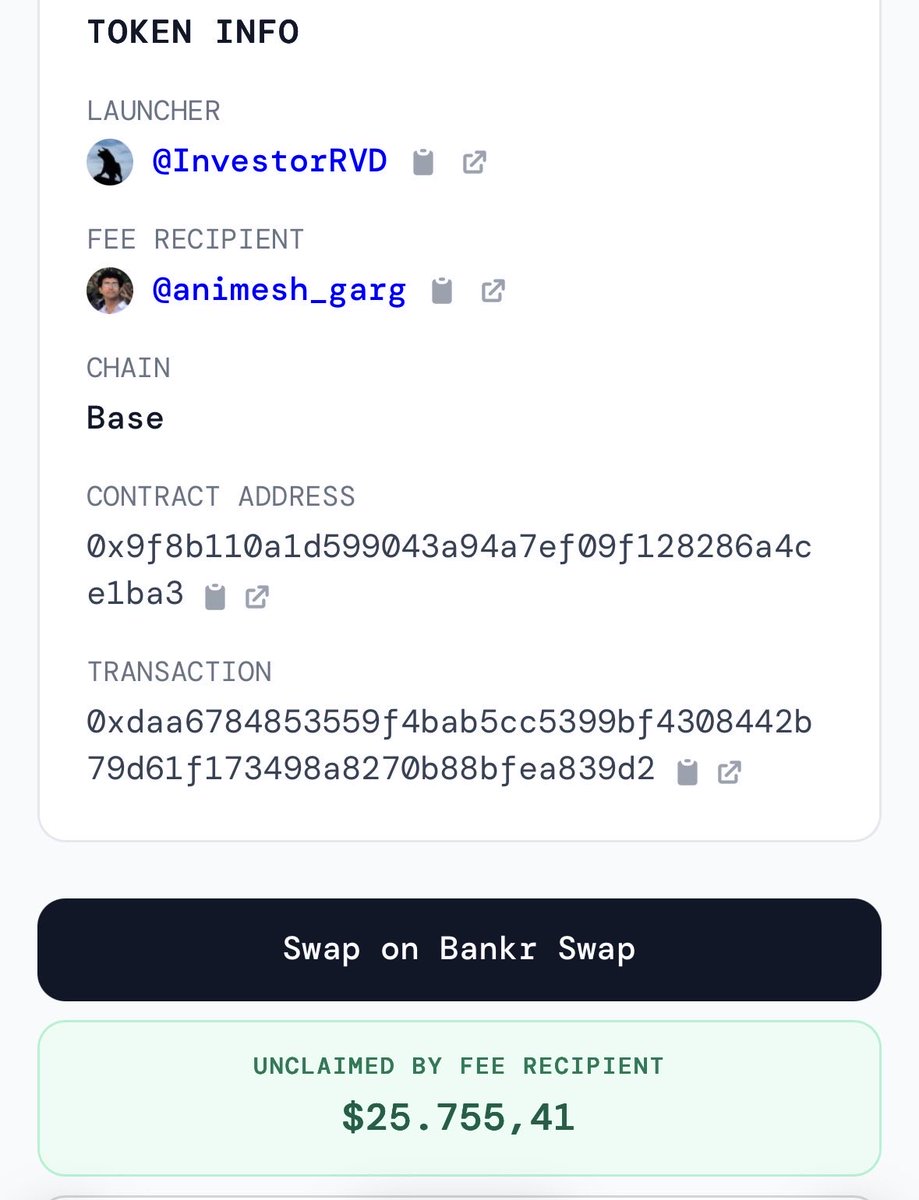
The community is still grinding. $COBALT fees keep accumulating for @animesh_garg and are ready to be claimed anytime via bankr.bot/launches/0x9f8b110…
Clean support going straight into upgrading the tech behind the robotics work.
cobalt-teleop.github.io
3
3
12
415
Jun 12
This data tier list for humanoid & robotics foundation models is spot on.
Real-world robot experience (especially high-dexterity data) sits at the top, while internet/human videos provide surprisingly strong transfer learning. Simulation and synthetic data still need more real-world proof.
The missing piece for scaling high-quality robot-specific data across many environments is scalable teleoperation infrastructure.
This is exactly where COBALT comes in, using everyday smartphones to collect diverse, real-world robot demonstrations at global scale.
x.com/michellelsun/status/20…
Jun 11

What is the best data for training humanoid & robotics foundation models?
Pete Florence @peteflorence (CEO @Generalist, ex-Google DeepMind) dropped his live data tier list in this 7-minute clip on @tbpn:
- S-tier: Real-world robot experience (especially glove/sensor high-dexterity data)
- A/B-tier: Internet/YouTube videos. Surprisingly powerful for transfer learning (the “web data” moment for physical AI)
- B-tier: Text/common crawl (Reddit, books, etc.). Useful priors, but not enough alone
- C-tier: Motion Capture. Great for whole-body motion, weak on finger dexterity
- C or lower: Simulation / synthetic / world models. High potential, still waiting for strong real-world proof
Generalist has collected 270,000 hours of real-world manipulation data (scaling ~10k hours/week). And Pete stressed one key point:
“The quality of data is incredibly important.”
It’s not just about volume. It’s developing intuition for what actually drives performance through hands-on work.
As Physical AI scales, curated real-world and high-quality internet video looks like a winning combo.
h/t @yuji_fujima
3
2
17
368
Marcel Bakery 🦖 retweeted

Jun 12
Genuine question for @animesh_garg: if you had an extra $32K/month (projected on 8K first week) in unrestricted funding, what’s the first bottleneck in teleoperation research you’d throw it at? Compute? Hardware? Data labeling?
2
8
15
3,217
Jun 12
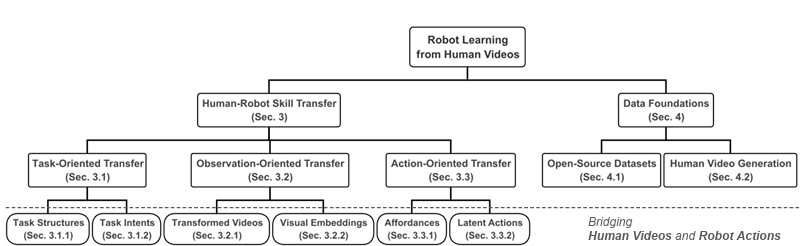
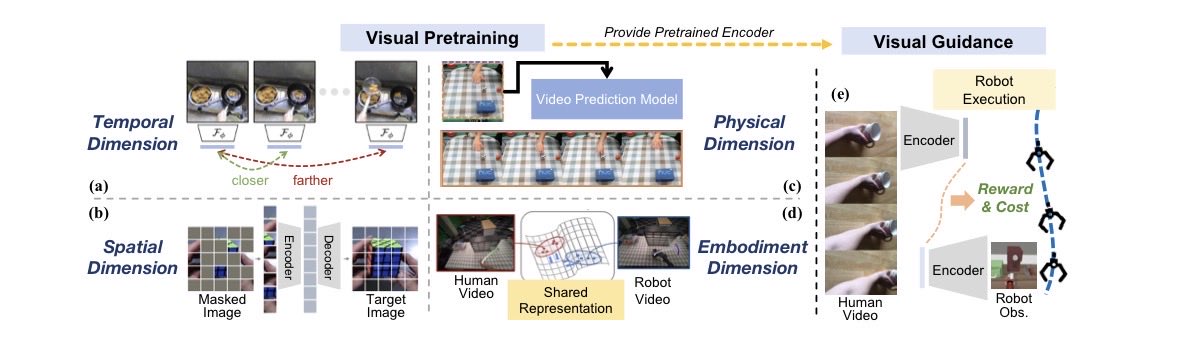
Looking at this taxonomy from the recent survey on Robot Learning from Human Videos, one thing becomes clear.
Human videos are excellent for scaling observations and high-level understanding. But when it comes to grounding robot actions in the real world especially in the Action-Oriented Transfer layer (affordances & latent actions) nothing replaces high-quality, diverse robot demonstrations.
The real unlock isn’t one lab producing demos in isolation. It’s scalable, cloud-native teleoperation that lets many operators across many environments generate rich robot data in parallel.
This is exactly what $COBALT was designed for.
Credits: arxiv.org/pdf/2604.27621
1
6
2,111
Jun 11
Love this framing. The line that matters most is the last one. Everything is in service of making that function good.
Here's the part people underrate though. What makes it good isn't a smarter architecture. It's the demonstrations behind it.
The function can only learn behaviors someone actually showed it. So the real frontier in robotics isn't the network. It's how cheaply and how widely you can collect real world examples of what you want the robot to do. Get that right and everything downstream gets easier.
x.com/interlatent/status/206…
Jun 10

Our mission is to make it easy for anyone to deploy a robot to help them in the real world
We wrote an intuitive guide to understanding modern robotics, catered toward an audience that understands technology but not AI robotics
We hope that this short blog post embeds in you the core principles that will bring further curiosity.
2
3
47
736
Jun 11
Tether wants robots that can hold a wallet and transact on their own. Fine. But a robot in the economy is only worth something if it can actually do the work.
And that comes down to one thing. Training data. A humanoid with a self-custodial wallet and no skills is just an expensive paperweight with a balance.
The machine economy everyone's racing to fund sits on top of capability. And capability sits on top of demonstrations. That's the layer @animesh_garg's PAIR lab is building with COBALT. Crowdsourced teleop from any phone. The cheapest way to teach robots the skills this whole economy is supposed to run on.
Fund the wallets all you want. Data is the foundation.
cobalt-teleop.github.io
x.com/tether/status/20647290…

Tether is leading a landmark Series C financing round of up to $1.4 billion for NEURA Robotics, @NEURARobotics , representing one of the largest private investment rounds in humanoid robotics history.
As robotics moves into true autonomy, payment and compute systems must evolve. Tether is deploying its core technologies directly into the Neuraverse ecosystem. By integrating our open-source Wallet Development Kit ( @WDK_tether), we are embedding self-custodial wallet functionality into advanced robots so they can independently participate in the economic system. Simultaneously, NEURA will deploy Tether’s @QVAC edge-first AI runtime, allowing AI models to execute locally on-device rather than relying on remote cloud infrastructure.
Together, Tether and NEURA Robotics are building the foundation for the machine economy.
2
7
159
Jun 11
$1.4B into a single humanoid company. Tether Nvidia Amazon Qualcomm all in at a $7B valuation.
But look closer. Neura isn't just building a robot. They're building a training data platform alongside it. That's the tell. The constraint was never the hardware. It's the data to teach it.
Which is exactly what @animesh_garg's PAIR lab is attacking with COBALT. Turn any phone into a teleop rig and crowdsource demonstrations at scale. No expensive hardware. The cheapest path to the one input every humanoid actually needs.
Capital is flooding the robots. The teams solving data collection are the real shovels.
cobalt-teleop.github.io
x.com/Cointelegraph/status/2…
Jun 10

🤖 NEW: German humanoid robotics startup Neura Robotics raised up to $1.4 billion from Nvidia, Amazon, Qualcomm, Tether, and others, reaching a reported $7 billion valuation.


2
1
6
292
Jun 11
Imagine being able to move and teach a real robot just by opening a simple app on your phone.
It’s kind of beautiful how $COBALT is turning the most ordinary object we carry every day "the smartphone" into a serious instrument for robot learning. No fancy hardware. No closed labs. Just people around the world using what’s already in their pockets to help build better robots.
This is how @animesh_garg and the COBALT team actually building the future of AI robotics.
cobalt-teleop.github.io
Apr 28

Mobile manipulation is not just putting arms on wheels. It introduces a different class of challenges, such as partial observability, whole-body interface design.
However, researchers are often held back by hardware setup before they can get to the actual research problems.
I recently wrote a tutorial, haoyu-x.github.io/simple-mob… to make the process easier.
With support from hardware vendors, you can now purchase an out-of-box hardware kit directly, without having to build everything from scratch. We also provide a plug-and-play codebase for the robot control, teleoperation, data collection, model training, and inference.
Simple Mobile aims to make mobile manipulators more accessible, save you time, and help you get to the **research part** faster.
4
3
44
904
Jun 10
Robotics is having its pre-Internet moment.
The bottleneck isn’t model architecture, it’s data. We have the algorithms and the compute. What we don’t have is enough examples of robots doing real things in the real world.
The new survey “Robot Learning from Human Videos” nails this: human activity videos are the abundant, passive resource we’ve been missing for scaling generalist robots.
arXiv: arxiv.org/pdf/2604.27621
1
4
50
1,251
Jun 10
Human videos aren’t just “nice to have” they’re dramatically more data-efficient than traditional teleoperation.
According to the survey, human videos can be collected 5–10x faster than robot teleop demos, with one hour of human data yielding ~10x more demonstrations in some settings.
This is exactly why scaling high-quality, diverse demonstration sources (human robot) is the real unlock for the next generation of robot policies.
arXiv: arxiv.org/pdf/2604.27621
1
98
Marcel Bakery 🦖 retweeted
Jun 10
A robot watching someone pour coffee solves four problems at once:
Time. Space. Physics. Embodiment.
The body doesn’t match. The physics is implicit. Yet the signal is rich enough to learn from.
If it pays off, the cost of teaching robots new skills falls through the floor.
6
1
22
253
Marcel Bakery 🦖 retweeted
Jun 10
Robotics is the next AI frontier.
The winners won’t just be the companies building robots, but the platforms supplying the data they learn from.
That’s why I’m paying attention to $COBALT and what @animesh_garg is building.
cobalt-teleop.github.io/
Jun 9

Robotics is the next AI frontier
8
3
31
575
Jun 10
For two centuries, making one of something cost far more than making a thousand. This constraint has driven almost everything that gets built at scale.
robot labor breaks the assumption: small batch production starts to cost what a batch of a thousand does.
What that does to where things get made, and who makes them?
Read the blog on what labor as a utility could unlock?
This is such a clear and powerful framing. Physical AGI doesn’t just automate tasks, it fundamentally rewires the economics of production by turning labor into something closer to a utility: scalable, location-independent, and no longer the dominant variable cost.
$COBALT’s approach to crowdsourced, smartphone-based teleoperation is exactly the infrastructure that makes this vision actionable. By democratizing high-quality demonstration data at global scale (already proven with thousands of demos across countries in days), it supplies the “what” and “how” needed to train the robots that deliver this abundance without the old hardware and cost barriers.
Excited to see how these ideas play out as the pieces come together. Brilliant post!
cobalt-teleop.github.io
Jun 7
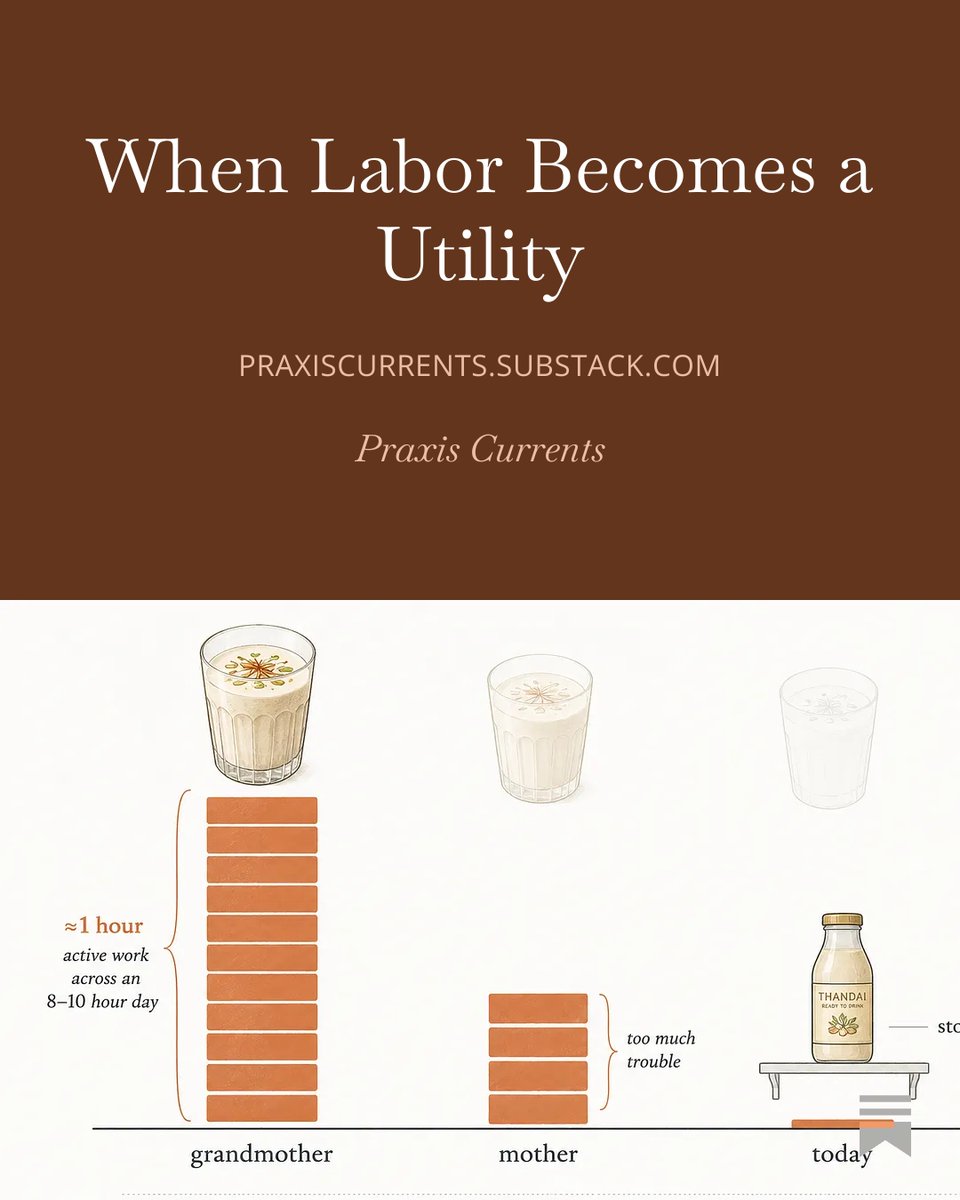
Grandma’s handmade recipe vs. mass-produced bottled good
For a century, industrialization forced a trade-off: cheaper standardization or expensive customization. Physical AGI stands to change this trade-off entirely.
What happens when When Labor Becomes a Utility?
New post on Praxis Currents: praxiscurrents.substack.com/…
3
1
17
279
Marcel Bakery 🦖 retweeted

Jun 9
Spot on. That first step is the whole game. Generating reference data is the part that just doesn't scale with the teleop hardware we have today.
And everything downstream inherits it. Your RL experts your distillation your real world deployment all of it is capped by the coverage you started with. So the real unlock is cheap diverse demos at scale. That's what makes COBALT worth watching. Crowdsourced teleop without the expensive rigs.
Curious how far the loco-manipulation envelope stretches once data stops being the constraint.
cobalt-teleop.github.io
@animesh_garg $COBALT
8
3
21
3,941
Jun 9
“why humanoid” gets another case study? Expansion of capability envelope of humanoids and importantly in a very data and compute efficient manner.
This is spot on. The future of capable humanoids will depend heavily on scalable, high-quality data collection, exactly what makes platforms like COBALT so valuable.
Being able to gather diverse, real-world demonstrations efficiently (without expensive hardware) is going to be key to making these sim-to-real pipelines actually work at scale.
Excited to see where this direction goes. $COBALT
cobalt-teleop.github.io
Jun 9
"why humanoid" gets another case study?
Expansion of capability envelope of humanoids and importantly in a very data and compute efficient manner.
the recipe that worked for locomotion in increasingly working on loco-manipulation and perceptive locomotion.
- data to generate reference ("what")
- RL in sim to create experts ("how")
- Distillation to add visual observations
- Deployment on real env.
8
3
50
474