
Joined June 2025
- Tweets 280
- Following 42
- Followers 83
- Likes 421
23 Photos and videos












Leon retweeted

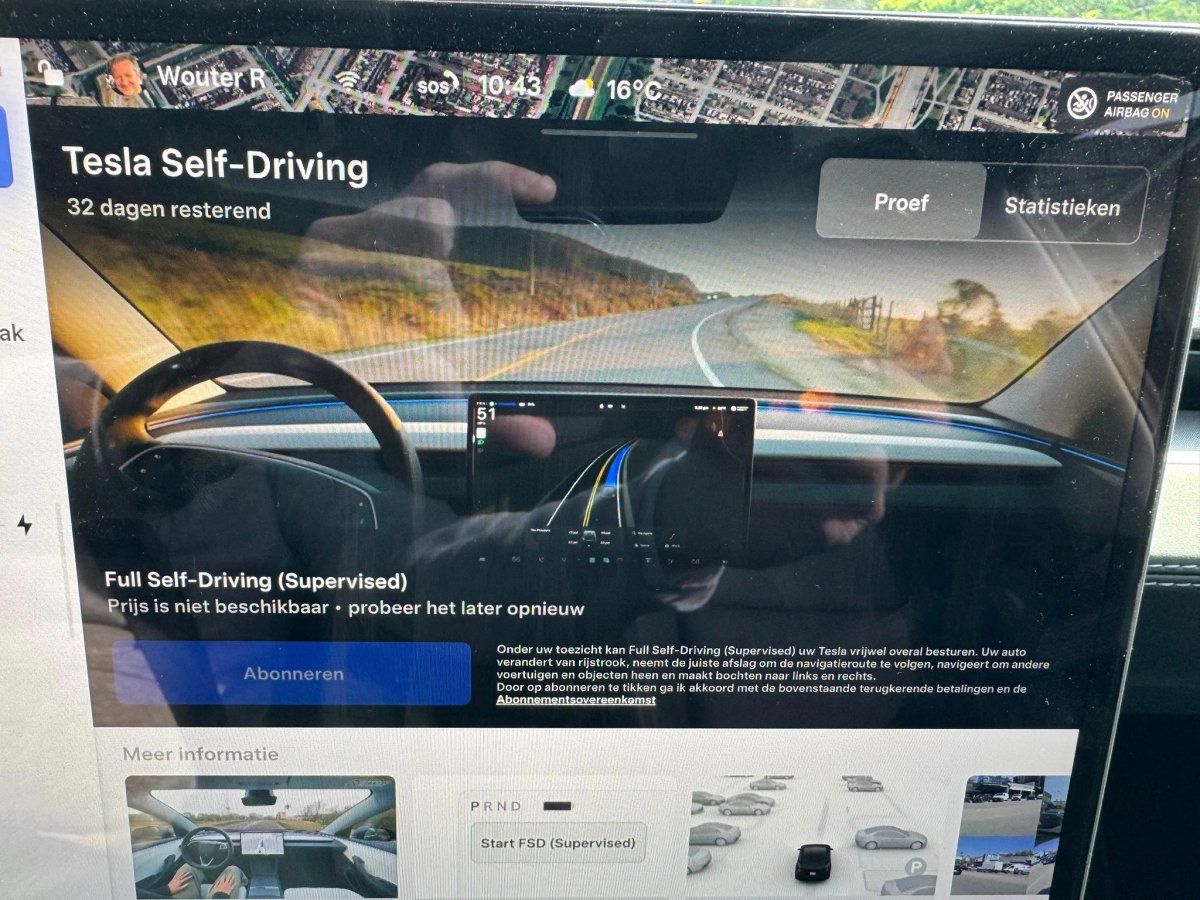
FSD Supervised now approved in Belgium 🇧🇪
Rollout will begin soon
336
917
8,414
1,883,092
Leon retweeted

Jun 10
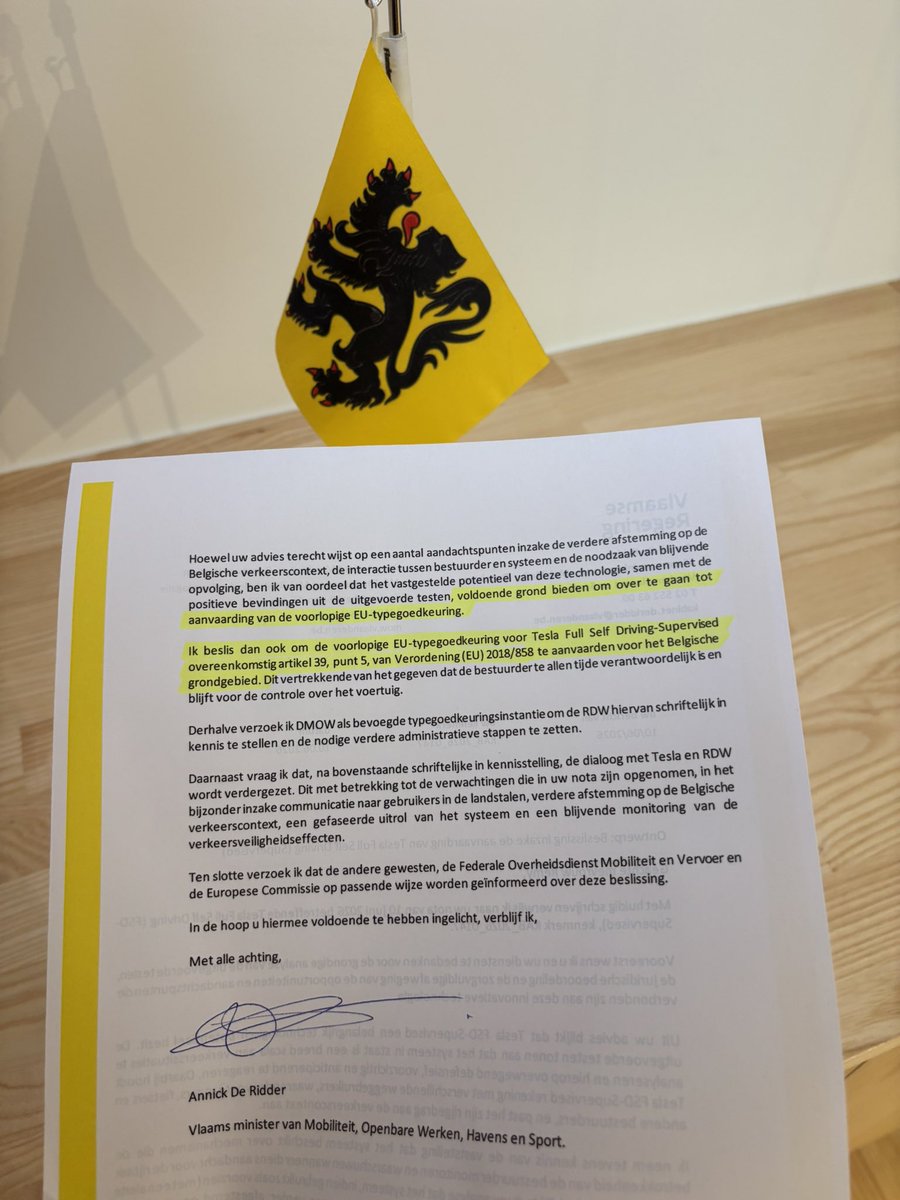
De @Tesla community houdt hier al geruime tijd de vinger aan de pols over de toelating voor de FSD-technologie op onze Vlaamse en Belgische wegen.
Uit waardering voor jullie niet-aflatende interesse (en aanmoediging 😉), krijgen jullie hierbij de primeur: ik heb net de toelating getekend! 🚘
Deze beslissing gaat nu naar onze dienst homologatie, zij zullen @RDWnl op de hoogte brengen van de goedkeuring. Vlaanderen omarmt innovatie!
469
539
3,991
574,872

🚨 FSD v14.2.2.6 (2026.17.5) improvement spotted. ⚡️🔥
First time after the update that my Dolphin didn’t immediately try to take the bus lane right after exiting the tunnel. Smooth navigation through the city, better decision making, and the visuals look noticeably cleaner too.
Progress is real 👏🧿
#Tesla #FSD #SelfDriving
15
15
129
36,932

Jun 3
Buy Tesla. Enjoy FSD! You can use my referral to get some extra’s
Ontvang 1.000 gratis Supercharging-kilometers of € 500 korting met mijn referral-link. ts.la/leon728667
36
Leon retweeted

Jun 1
AI3 Teslas get FSD 14 Lite this month
234
96
1,941
231,578
Leon retweeted

May 15
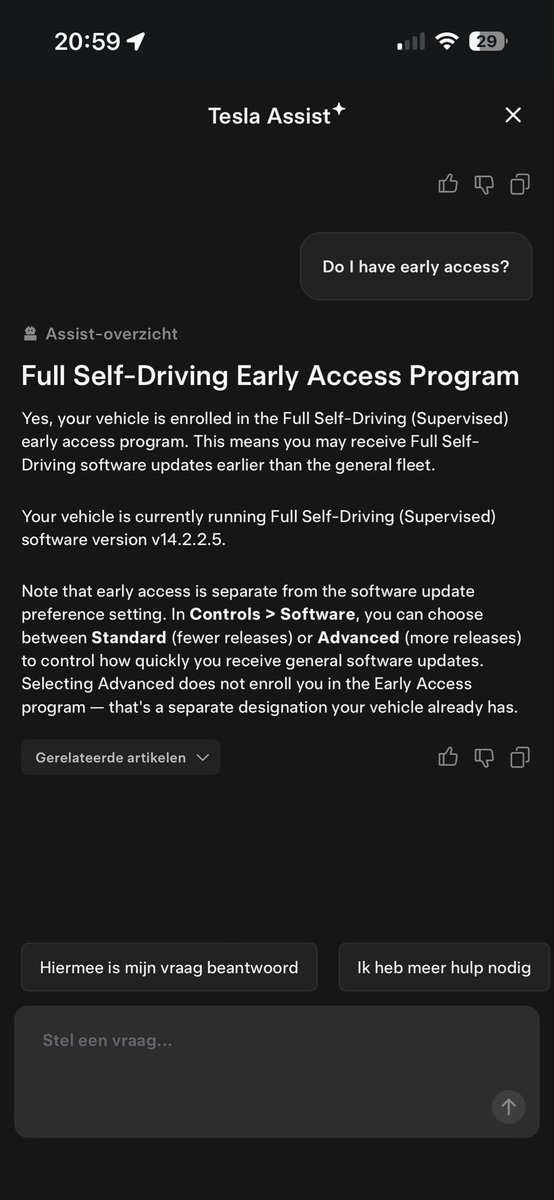
@teslaeurope Please note this little bug for Dutch 2026.3.7 with FSD 14.2.2.5
The stats for FSD use are started from the installation of 2026.2.9.1 but should start from 2026.3.6 ! Now I have a 36.5% FSD score but I assure you its more like 99%! @Tesla @elonmusk @NotATeslaApp
2
3
487
May 10
If you would like to experience FSD in the north of NL. Please send me a DM and prepare to be amazed🔥
1
1
58
May 8
I’ve already driven 2,000 km with Full Self-Driving in the Netherlands. Here are my thoughts on the system.
Overall, I’m really impressed with what the first version (2026.3.6) has shown so far. I’m a big Tesla fan, and I’m writing this with a critical eye in order to help improve the software. The car is already safe enough to drive with driver supervision. That said, here’s what can still be improved and what went wrong:
Biggest positive:
The car didn’t wreck itself and generally makes very safe decisions. Sometimes it simply refuses to drive further, and you have to press the accelerator to continue. On my first night drive, the car suddenly panicked and stopped in the middle of the road because of a special type of curb (a traffic island curb). It even wanted to turn around 😅. It was quite funny.
The next day, during daylight, the same curbs were no problem at all.
The only time I was really forced to intervene happened in the first two days. The car stopped perfectly before a railroad crossing with closing barriers, but then accelerated again and wanted to proceed just as the barriers were almost fully closed. I imagine this can be a scary moment for drivers using self driving.
Another important thing I noticed, especially during rush hour on the highway, is that the car activates its turn signal with enough space to change lanes, but then starts doubting itself and aborts the maneuver. This happens quite often. It’s very annoying, so I usually disengage and change lanes myself.
It feels like the software is missing some decisive strength. Even when another car gives way or flashes its high beams, the car still won’t change lanes. Especially in traffic jams, you need to think and act quickly to safely navigate through traffic.
Driving in urban areas, like the city centre of Groningen, is genuinely impressive. However, sometimes the car doesn’t proceed on a green light and needs a little nudge. It also often fails to take the right of way when crossing cyclists and pedestrians and can wait endlessly. In Groningen, you’re required to cross the bus lane to reach the left-turn lane, but the car simply refuses to do it.
I think what the software really needs in the Netherlands is an assertive driving boost. I understand Tesla’s very safe approach to avoid damage or crashes, and I know the strict RDW requirements play a big role. But because the car lacks assertiveness, it sometimes creates dangerous situations — other road users (especially cyclists, motorcyclists, and cars) anticipate differently. This is particularly noticeable with cars and motorcycles on the highway.
Finally, the car still won’t park itself properly. When navigating to a Supercharger, it sometimes stops in front of the Van der Valk hotel. When navigating to a parking spot, it often stops in the middle of the road or parks crooked — either at an angle or awkwardly between two spots.
In my opinion, this is partly caused by the heavily regulated Dutch environment. Tesla had to limit the software too much to comply with local rules. Because of this, the car is sometimes too restricted to make the correct decisions.
Still, I believe in Tesla and the mission to massively improve road safety. I’m confident that future updates will dramatically improve the system. The RDW and Europe should trust Tesla more — they have already proven it works in the United States.
The future is autonomous, and Tesla rocks! 🔥
2
118
Leon retweeted
Tesla owners in the Netherlands have driven 10 million km on FSD Supervised in under a month! Thank you for making Dutch roads safer 🤝
348
1,368
9,572
1,200,347
May 3
Just got the holiday update on our HW3 and the 2026.3.7 on our MY which replaces the 2026.3.6 FSD. I’m curious when the holiday update will land.
65
Leon retweeted

May 2
This is a brand new Tahoe. They must have bought the zen version with the water feature meant to keep you from getting road rage. 😆
1,081
926
6,117
1,121,959

Following future rollout of FSD V14 Lite for HW3 vehicles in the US, we plan on expanding V14 Lite to additional international markets.
This update ensures that HW3 vehicle owners will continue to benefit from ongoing software updates.
Since international rollout is subject to several factors (completion of technical verification, regional adaptation & relevant regulatory approvals), we can't provide definitive dates at the moment, but will provide updates on a rolling basis
1,037
2,142
12,378
1,985,936
Leon retweeted

Apr 19
Tesla vient d'allumer à Corpus Christi (çà ne s'invente pas...) la première raffinerie majeure de lithium des États-Unis, et ce qui me frappe n'est pas le made in USA. C'est que Musk a balancé l'approche standard à la poubelle pour repenser entièrement le procédé from scratch.
La raffinerie tourne sans acide sulfurique. Six étapes au lieu de huit à douze, un million de véhicules électriques par an en capacité nominale, 50 GWh à terme. Pas de sulfate de sodium toxique à gérer derrière, juste un résidu minéral quasi inerte qu'ils appellent analcime. Sur le papier ça sent le storytelling, sauf que l'usine tourne vraiment depuis janvier et que l'investissement a dépassé le milliard de dollars.
C'est la réponse industrielle à quinze ans de dépendance chinoise sur le raffinage. La Chine contrôle la majorité du lithium raffiné mondial, pas parce qu'elle a les gisements, mais parce qu'elle a absorbé les externalités environnementales qu'aucune boîte occidentale ne voulait assumer. Tesla prouve qu'on peut contourner le problème au lieu de le subventionner.

Tesla engineering redesigned lithium refining from physics first principles
384
1,796
8,092
1,775,448
Leon retweeted

Mein Model S hat 1.040.000 km auf einem Akku. Das ist ok.

Lass halt die Batterie reparieren, nach 170Tkm ist das doch ok…
20
32
558
61,303
Leon retweeted

Apr 17
Tesla Launches Free FSD Trials in the Netherlands notateslaapp.com/news/3990/t…
3
11
90
8,626
Leon retweeted

Apr 16
Aujourd'hui grosse discussion avec mes ingés (chez Argil) sur pourquoi Elon a viré le LIDAR de ses voitures autonomes. Choix radical, moqué pendant des années, et comme d'hab il avait raison depuis le début.
Le LIDAR c'est un laser qui balaye l'environnement et crache un nuage de points 3D. Sur le papier tu obtiens la géométrie exacte du monde. Dans la vraie vie c'est une verrue technologique collée sur le toit parce qu'on sait pas faire mieux avec la vision seule.
Problème numéro un : ça rajoute une modalité dans le training du modèle. Ton réseau doit apprendre à fusionner vision lidar radar ultrasons. Chaque capteur en plus c'est une source de désaccord à arbitrer, pas une source d'info supplémentaire. Sensor fusion artisanale = dette technique permanente.
Problème numéro deux, la bitter lesson de Rich Sutton : scaler le compute sur une seule modalité bat systématiquement les architectures bricolées à la main. Tesla a dropé le radar, puis les ultrasons, est passé full end-to-end vision. Leur courbe sur les edge cases s'est accélérée APRÈS, pas avant. Waymo fait l'inverse et reste stuck en ops géofencée.
Problème numéro trois, le plus fondamental : le LIDAR voit la géométrie, pas la sémantique. Il sait qu'il y a un truc, pas ce que c'est ni ce que ça va faire. Les derniers 9 de fiabilité sont des problèmes de cognition, pas de perception brute. Un capteur de plus résout rien, il ajoute du bruit.
Sébastien Loeb balance une 208 T16 à 180 dans un chemin boueux corse sous la pluie avec zéro LIDAR. Deux yeux, un cerveau. L'évolution a donné des yeux aux prédateurs pendant 500 millions d'années, pas des lasers. Il y a une raison.
Le LIDAR c'est l'équivalent du marxisme appliqué à l'économie. Une solution planifiée, centralisée, qui prétend modéliser explicitement ce qui doit émerger d'un système distribué et adaptatif. Tu remplaces l'intelligence par de la mesure, la compréhension par de la donnée, l'émergence par le contrôle. Ça rassure les ingénieurs qui veulent tout spécifier en amont, exactement comme la planif rassurait les économistes soviétiques. Et ça échoue pour les mêmes raisons : la réalité est trop riche pour être capturée par un capteur, comme elle est trop riche pour être capturée par un plan quinquennal.
La vraie intelligence, celle de Hayek comme celle de Tesla, c'est de faire confiance à un système qui apprend de l'expérience plutôt que de tout pré-encoder. L'élégance d'une solution c'est son rapport signal sur complexité. Le LIDAR explose le dénominateur.
Défendre le LIDAR en 2026 c'est préférer empiler des hacks plutôt que résoudre le vrai problème. C'est de la feignasserie intellectuelle maquillée en rigueur d'ingénieur. Les mêmes gens qui défendaient les systèmes experts en 2012 contre le deep learning. Ils finiront pareil.
Never bet against end-to-end. Never bet against la simplicité. Never bet against Elon.

1,107
2,165
18,382
29,276,046


This is pretty cool

You can enable FSD Supervised without setting a destination to let your Tesla show you around
1,571
2,622
27,411
21,922,359