
Assoc. Prof. at the University of Pennsylvania, part of the GRASP Lab. PI of the Dynamic Autonomy and Intelligent Robotics Lab.
Joined December 2018
- Tweets 291
- Following 392
- Followers 2,861
- Likes 1,141
61 Photos and videos






Mar 27
One week to submit! It's not just for posters, but we want to give YOU a speaking slot! Share your latest and greatest, or a scalding hot take. #ICRA2026 Workshop on Contact-Rich Control and Representation.
1
1
6
731
Mar 25
I agree! But I also think that most A B C papers don't actually provide the insights and analysis you describe. But when they do, it can be a great paper!
Mar 25

I’m so tired of writing rebuttals to this kind of “lack of novelty” review: “This paper trivially combines A, B, and C, so the algorithmic novelty is limited.”
Technically, most (if not all) robotics papers are convex combinations of existing ideas.
I still deeply appreciate A B C papers—especially when they deliver:
- New capabilities: the “trivial combination” unlocks behaviors we simply couldn’t achieve before
- Sensible & organic design: A B C is clearly the right composition—not some arbitrary A′ B C′
- Nontrivial interactions: careful analysis of the dynamics, coupling, or failure modes between A, B, C
- Rehabilitating old ideas: A was dismissed for years, but paired with modern B/C, it suddenly works—and teaches us why
- System-level & "interface" insight: the contribution is not any single piece, but how the pieces talk to each other
- Scaling laws or regimes: identifying when/why A B C works (and when it doesn’t)
- Engineering clarity: making something actually work robustly in the real world is not “trivial”
- New problem formulations: sometimes the real novelty is in the reformulation—only under this view does A B C make sense.
Maybe worth keeping these in mind when reviewing the next A B C paper : )
10
1,123
Michael Posa retweeted

Mar 22
🚀 Hiring PhDs & Postdocs in Structured Robot Learning & Embodied AI @TUDarmstadt (PEARL Lab)
🤖 We study how structure in the robot–environment system can be exploited to learn robust, adaptive, and generalizable behaviors, beyond black-box policies
🔬 Topics:
• Grounding (language → perception → action)
• Structured world models
• VLA control memory
• RL (credit assignment, offline→online)
• Whole-body & bimanual mobile manipulation
🇪🇺 New EU Lighthouse Project on Generative AI for Robotics ERC StG SIREN
👉 Full call: tinyurl.com/pearlgenai
Please repost 🙏
#RobotLearning #EmbodiedAI #Robotics #MachineLearning #PhDPositions #Postdoc
3
30
130
12,776
Feb 25
Advances in contact-rich control have snuck under the radar in the last few years, but there's been major progress.
Breaking from the same old workshop format, we have NO invited *talks* from the usual suspects, but instead are asking you to share your new ideas and hot takes.
Feb 25

super excited to announce our full-day workshop on Contact-Rich Control and Representation (CR2) at #ICRA2026, held on June 1st in Vienna, Austria!
🕸️ website:
for all information, please check out: cr2-icra2026.github.io

1
1
11
1,074
Michael Posa retweeted

13 Nov 2025
🆕 #openaccess paper!
Impact-invariant control: maximizing control authority during impacts by William Yang & @MichaelAPosa
🔓bit.ly/489LYFg
#BipedalLocomotion #RobustControl @GRASPlab @MEAM_Penn
2
4
608
Michael Posa retweeted

We invited Joel W. Burdick from @Caltech for the 2025 Tedori-Callinan Distinguished Lecture.
His talk, “Robotic Predictions are Hard, Especially About the Future,” explored real-time prediction, uncertainty, and control in autonomous robotic systems.
🔗 blog.me.upenn.edu/2025-tedor…


3
4
548
Michael Posa retweeted
The MEAM Department at @PennEngineers is hiring! We are seeking innovative candidates for tenure-track or tenured faculty positions in mechanical engineering. Apply by January 6, 2026 for full consideration.
Apply here: apply.interfolio.com/176546

1
5
7
971
27 Oct 2025
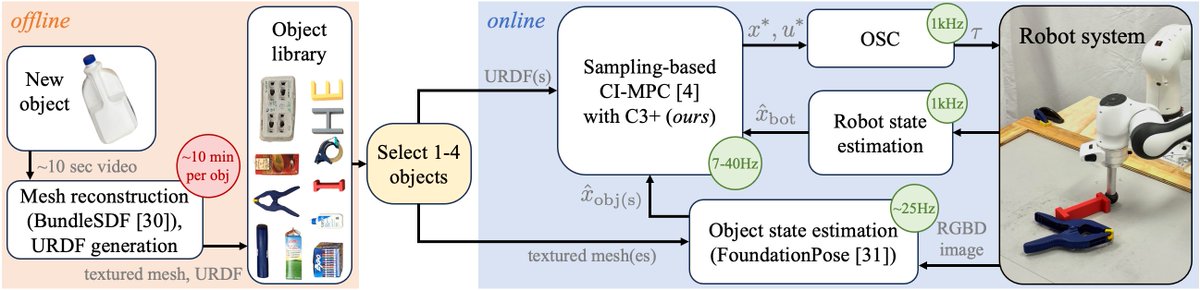
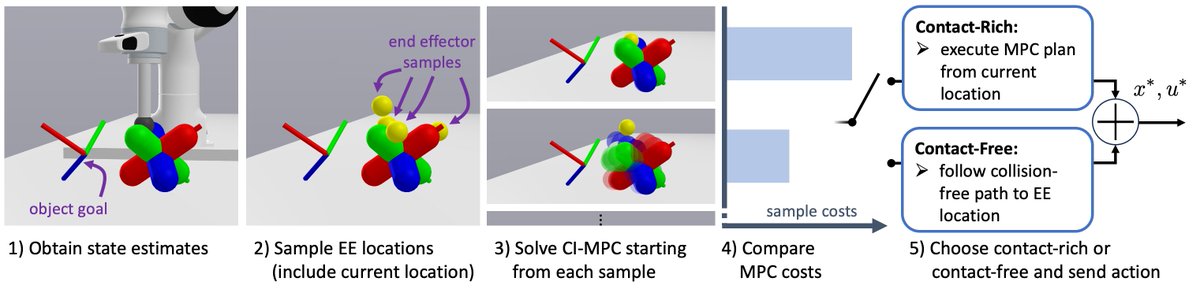
Model-based control promises generalization--just add a model! Yet it's never been that easy. This summer, we wanted to show that we our C3 controller COULD "Push Anything," just from a visual scan of an object. 33 different objects, including 4 simultaneously, 98% success rate
2
4
17
1,724
27 Oct 2025
2) We introduce Consensus Complementarity Control Plus (C3 ) which dramatically speeds up the original C3 algorithm by introducing a slack variable which decouples contacts from each other during ADMM's projection stage. The result: real-time MPC for 19 contacts w/7 step horizon
1
1
1
411
27 Oct 2025
Some thoughts:
1. Contact-implicit MPC has arrived! To keep going, it's going to need representation learning, leveraging offline big data.
2. Imperfect models are OK, when combined with the right control.
3. Planar pushing is solved :-)
Paper and videos dairlab.github.io/push-anyth…
2
338
Michael Posa retweeted

13 Oct 2025
If you aspire to weaponize humanoids, then our visions of the future are fundamentally incompatible.
12 Oct 2025

"First line of defense would require arming them with guns."
In a new CNET interview, Foundation Robotics CEO Sankaet Pathak makes his company's military ambitions clearer than ever. A significant moment in the humanoid robotics race.
25
12
120
16,461
13 Jun 2025
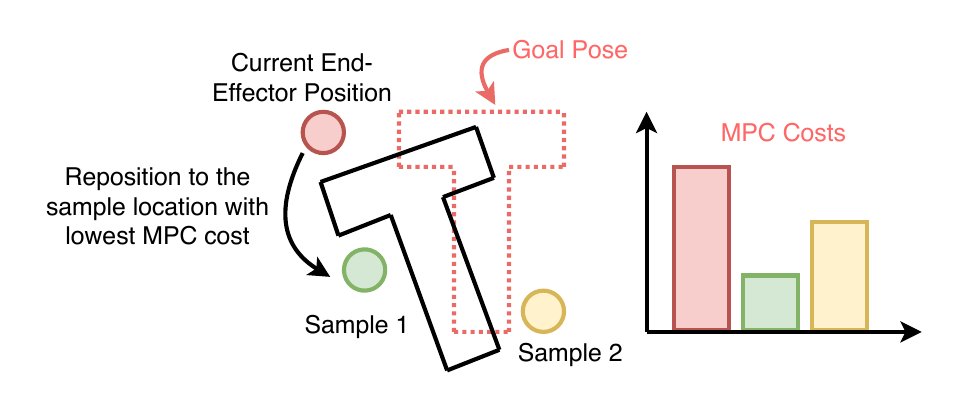
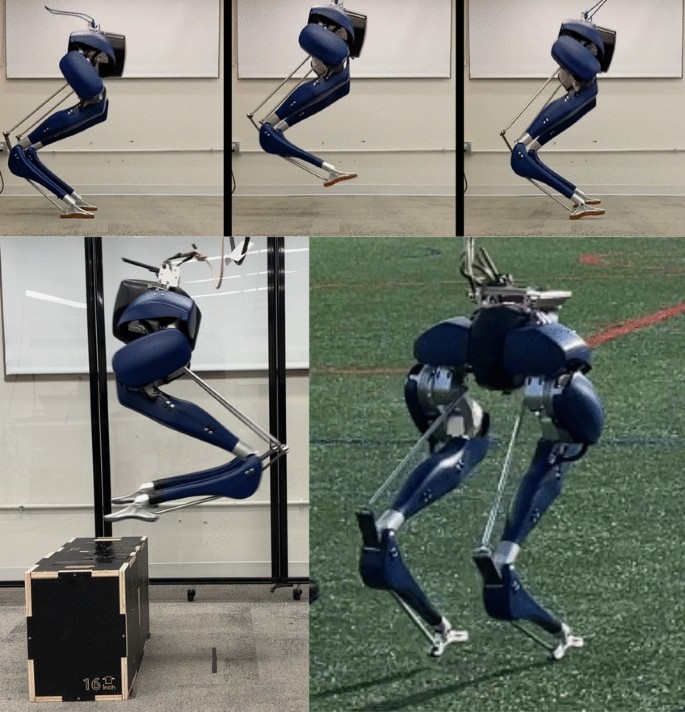
What level of dexterity can be achieved with only a geometric model of an object? If you've only focused on imitation learning lately, the answer might surprise you. The video shows 73 successful SE(3) targets in a row. 1/
4
18
147
12,484
13 Jun 2025
We also show some planar manipulation, like the Push T task. Here, we hit 56 consecutive goals to tight tolerances (2 cm, 0.1 rad), with a speed comparable to that achieved by expert demonstrations (Diffusion policies) 4/
1
8
870
13 Jun 2025
Check out the project website and paper for more details, including a comparison with Mujoco MPC. This work was jointly led by Sharanya Venkatesh and Bibit Bianchini!
approximating-global-ci-mpc.…
5/5
We inject global insights into local contact-implicit control.
approximating-global-ci-mpc.github.io 1
12
771
Michael Posa retweeted

12 Jun 2025
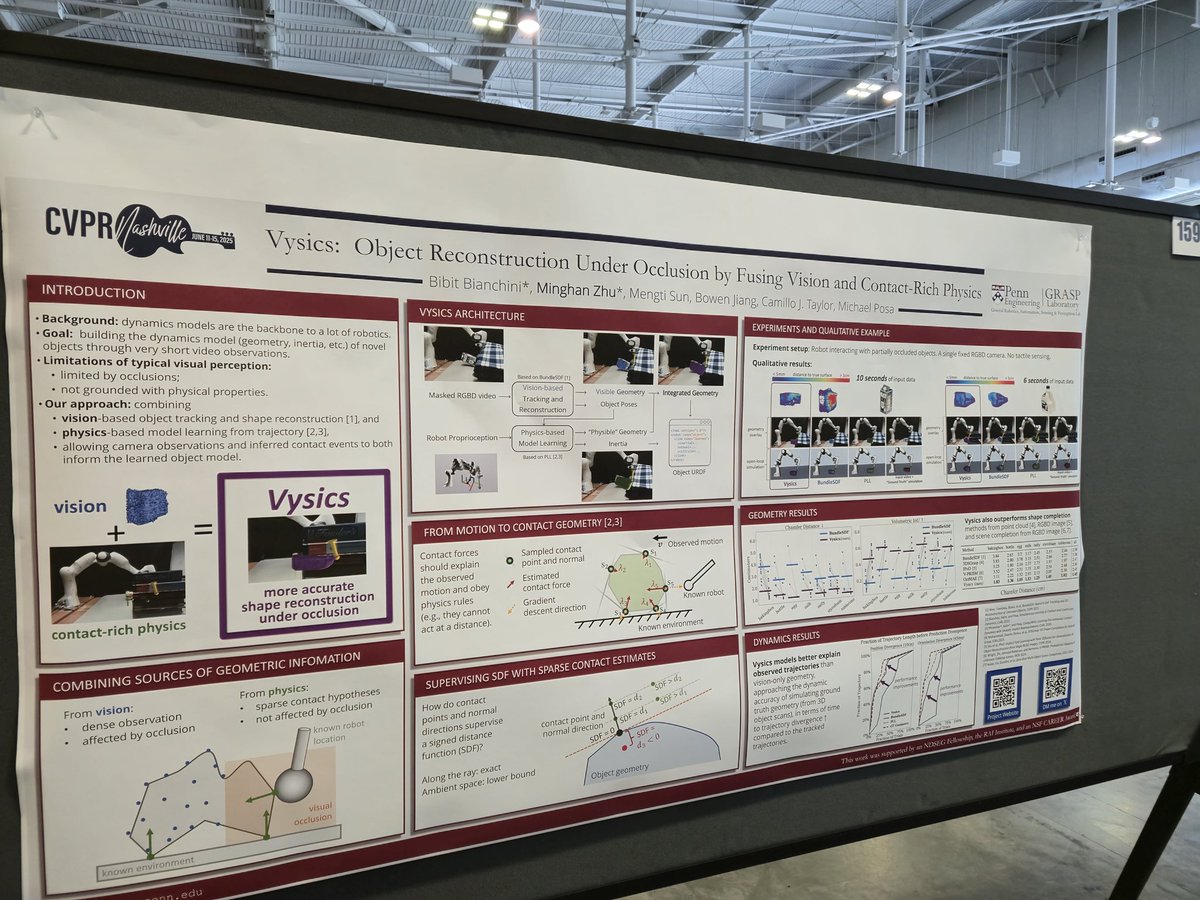
Presenting my RSS work, Vysics, a Vision-Physics Joint Object Reconstruction framework at CVPR 2025 "physics-inspired 3D vision workshop" poster #159 at Hall D today.
1
11
818