
Electronics engineer with a passion for DIY. Always building, exploring, and taking on new challenges. Check out my projects at notblackmagic.com.
Joined February 2020
- Tweets 1,322
- Following 894
- Followers 1,222
- Likes 34,899
356 Photos and videos




Pinned Tweet
My main project for 2026 (and onward if it goes well):
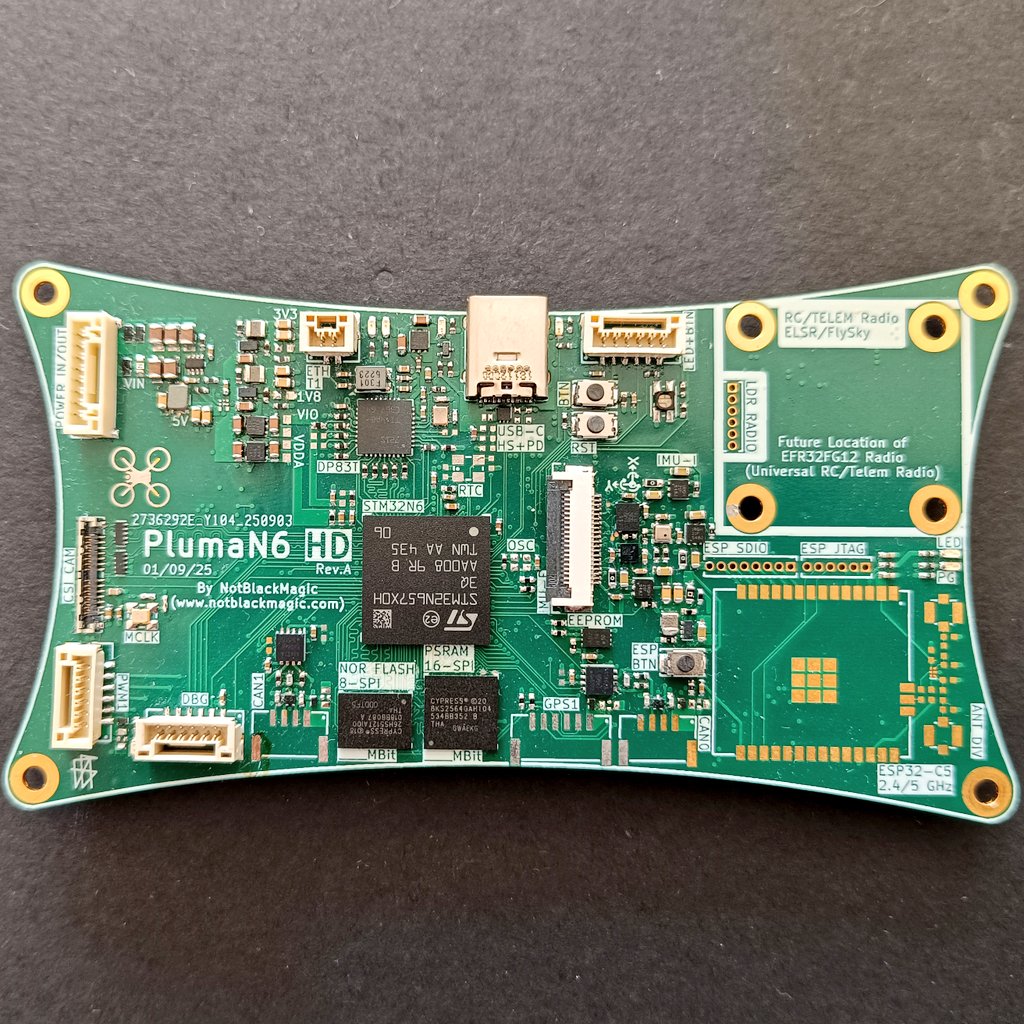
The PlumeN6 HD:
- STM32N6 MCU
- MIPI-CSI interface
- MJPEG and H.264 encoder
- USB-HS
- 1000Base-T1 Eth.
- ESP32-C5 (maybe)
Planned to be used first in either a custom small drone (Andorinha) or a MobED style robot (Lince).

3
2
20
1,680
Working on the ICM-45686 driver for the #PlumaN6.
Who thought it is a good idea to give the register table in big-endian when the DEFAULT is little-endian??
You have to change the endianness to match the register table (set SREG_DATA_ENDIAN_SEL bit).
5
155

Code is also slowly being pushed to my GitHub here:
github.com/NotBlackMagic/Ins…
2
62

May 26
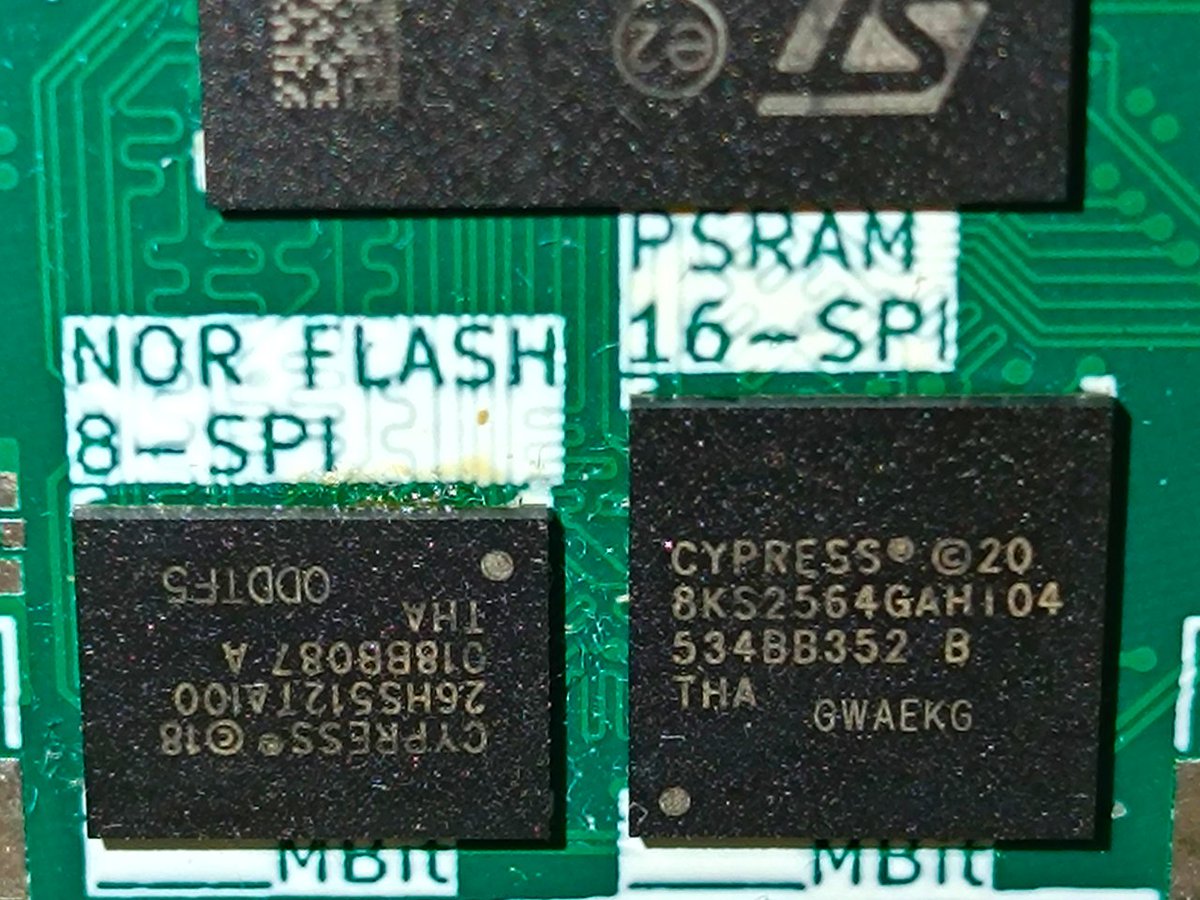
It took a LOOONG time but I figured out the issue with my bit errors on the HyperBus over 100 MHz!
Besides setting the IO voltage in registers, it is also required setting the OTP fuses! That fixed the issue and now get table 200 MHz both on HyperFlash and HyperRAM!
#stm32n6
Feb 19
Finally have both the HyperBus external Memories working error free at 100MHz. Was an issue with drive strengths configurations, I had to lower them on the Memory side (reflection issues?).
Stable and error free 350 MB/s reads from PSRAM (DMA).
Next figuring out limits (200MHz?)
15
1,050
May 18
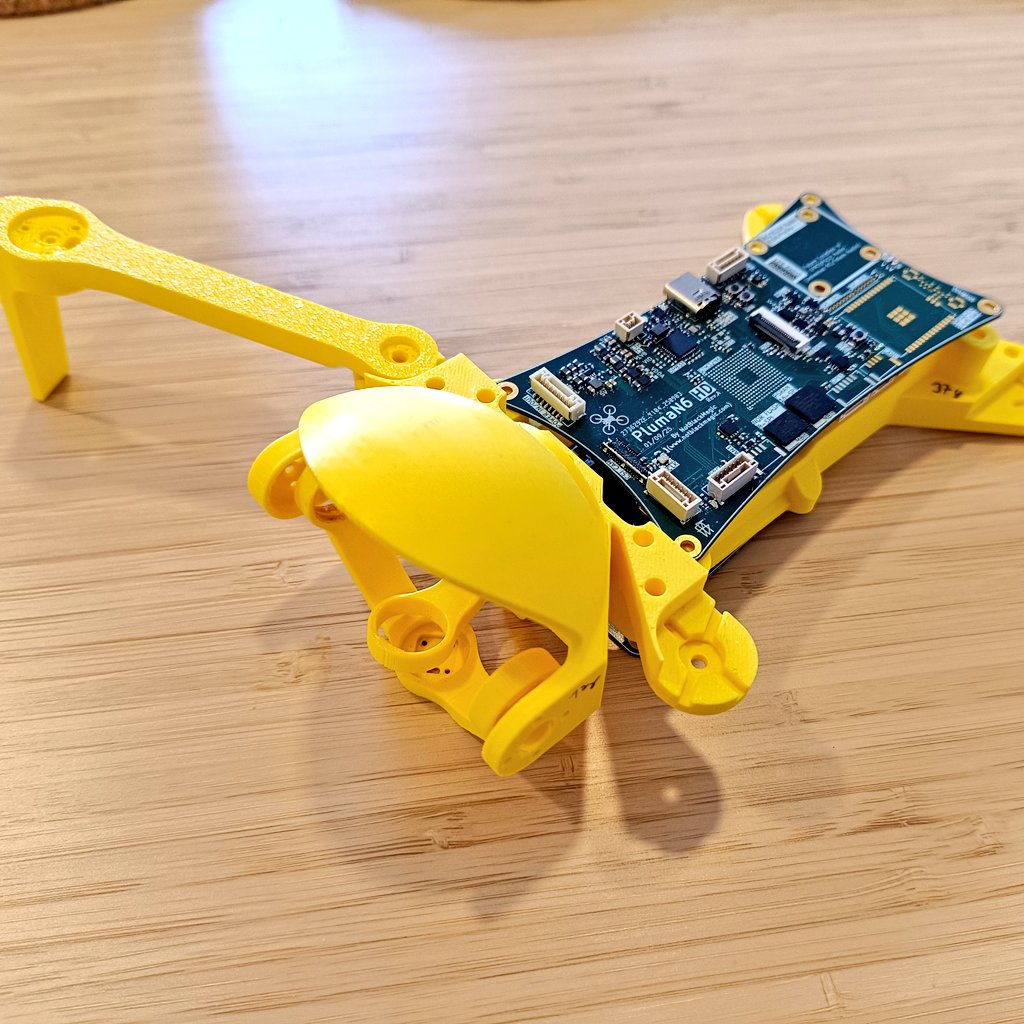
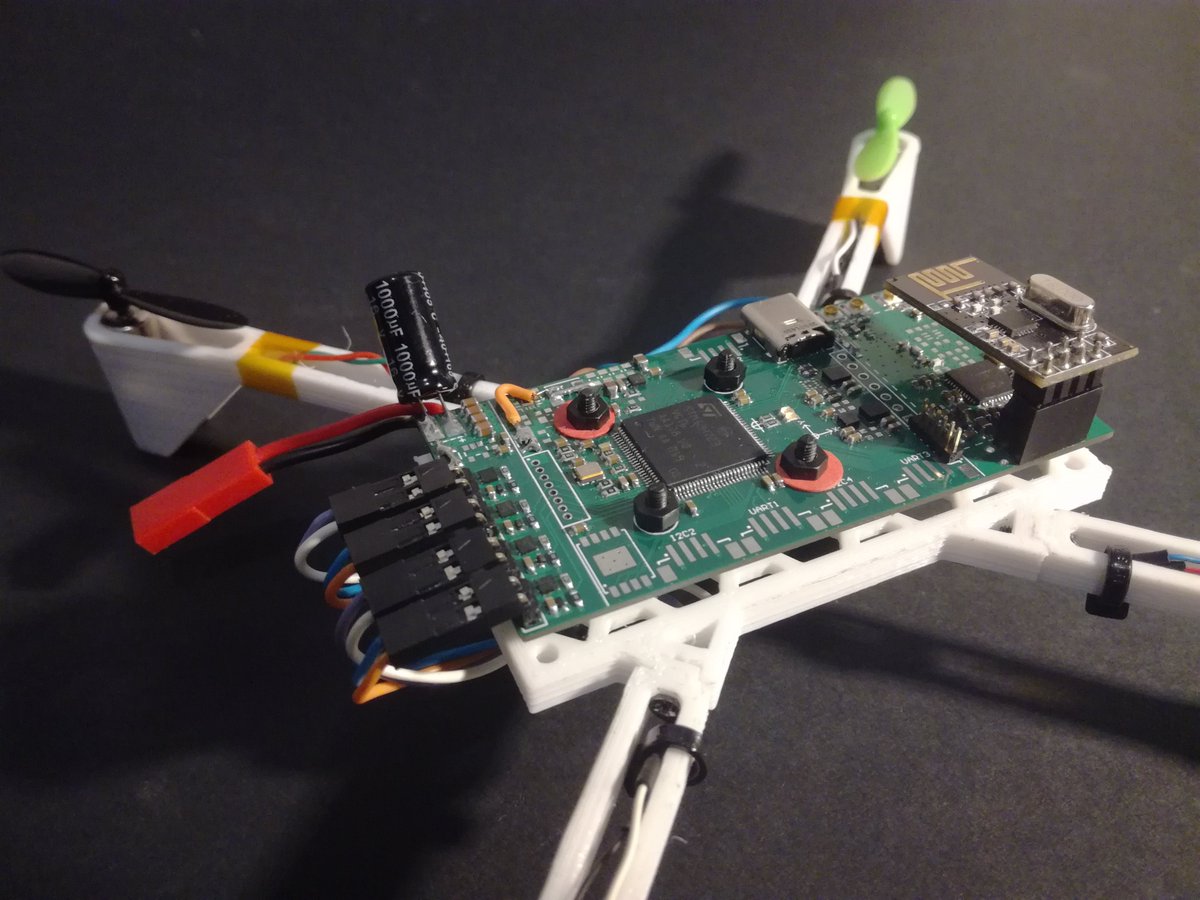
Been working on the hardware side of the #PlumaN6 and #andorinha drone Project.
First version of a 3D printed drone frame, with custom gimbal and articulated arms. Target of around 250g, probably will be over.
#drone #3dprintedplane #cad
1
8
225
May 15
Designed a new version of my Micro Drill Storage Box.
Removed the corner magnets, now with sliding lid, and added drill size labels to each slot!
Can be found for free on Maker World:
makerworld.com/en/models/280…
4
236
May 15
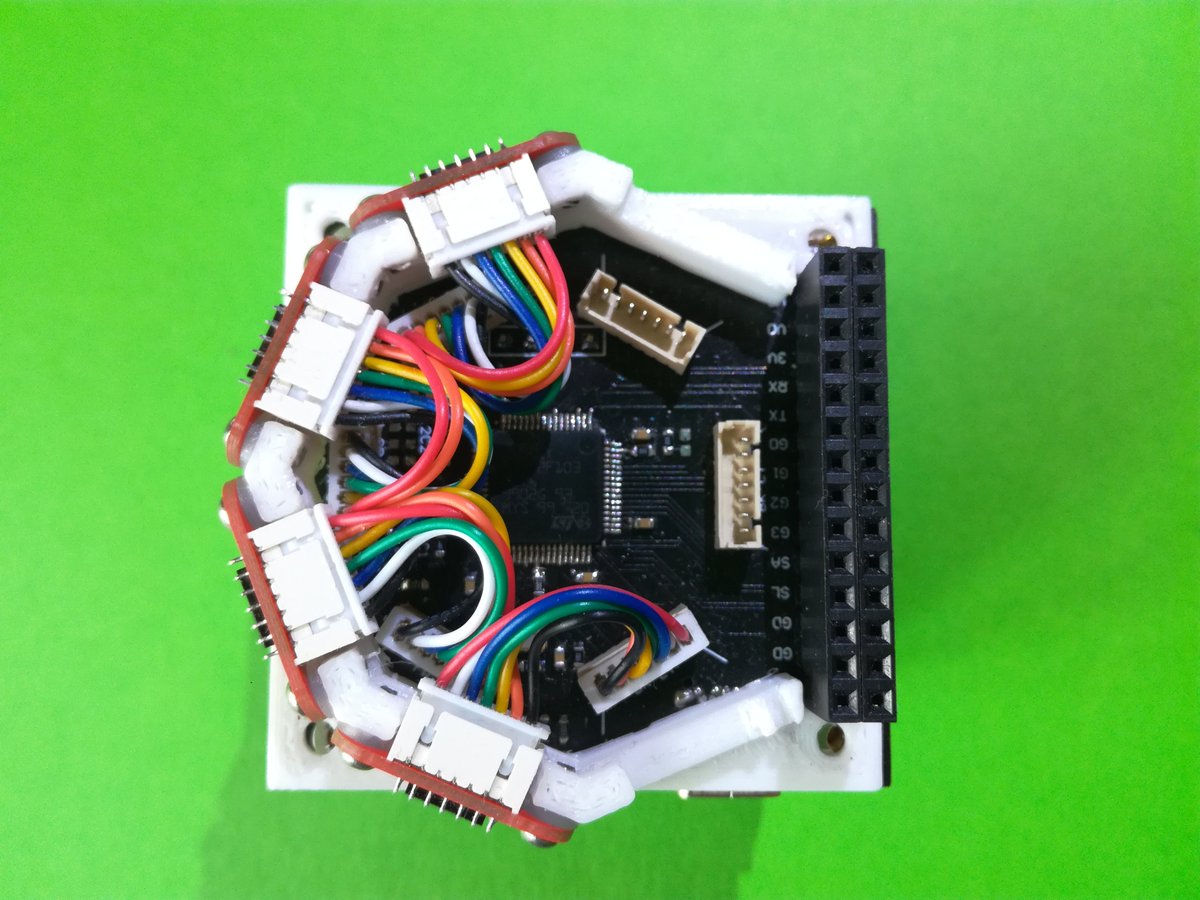
I have developed a similar system as well, using 4 ToF sensors from STM to create a 180º Solid State LiDAR.
This was part of my Mini Cube Robot project! Had it streaming the point cloud to the PC but stopped there.


6
353
May 14
I'm starting to look to upgrade my home soldering lab and looking for a Hot Air Station. From what I found so far, the Atten 862D seems to be the pick for great performance for the price.
Any other recommendations or experiences with some hot air stations?
2
238
May 10
Another part of the #PlumaN6 project: I'm looking to design a small DIY gimbal. First version was designed around a cheap 1105 BLDC motor but then I found some better gimbal motors also in 1105 size (smallest I can find)!
1
3
332
Continue work on the JPEG encoder:
The standalone (legacy?) JPEG unit is clearly designed for Decoding. The periph. in/out-puts in 8x8 blocks so linear YUV data needs to be transformed into blocks.
For DEC, this can be done on the 2D DMA, but on the ENC side only with software..
Apr 28
1
105
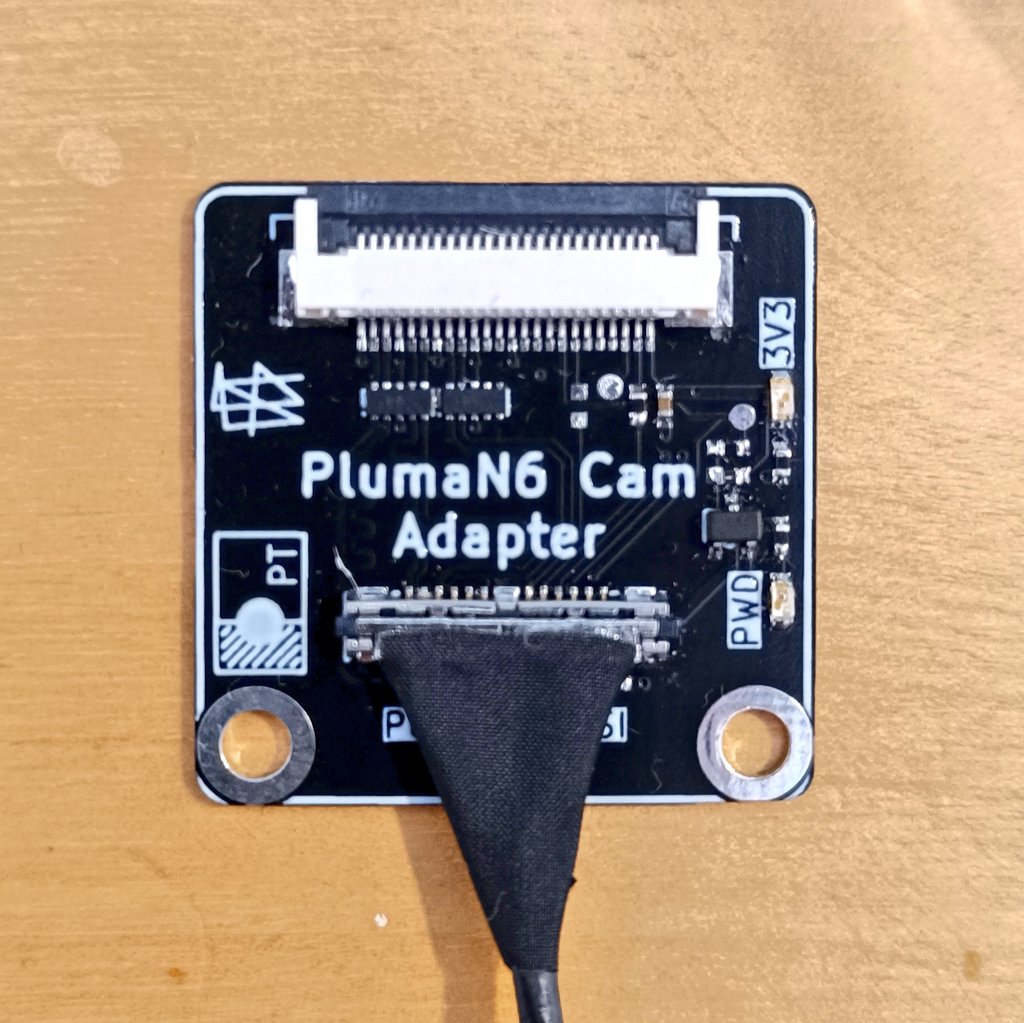
The final add-on board for the #PlumaN6 (for now). An adapter board for the flexible coax cable to a 24-pin FFC compatible with the Google Coral Camera.
This is for the HD camera, using the MIPI-CSI interface.
1
189
NotBlackMagic retweeted

Apr 30
Navigation for Autonomous Vehicles course! 🚁
@MIT Visual Navigation for Autonomous Vehicles (VNAV) course is available as a free resource covering the entire autonomous navigation pipeline.
What's inside? 2D & 3D Computer Vision for navigation, Visual & Visual-Inertial Odometry for state estimation, Place Recognition & SLAM for localization & mapping, Trajectory Optimization for motion planning, Deep Learning for Perception.
Complete slides and notes with examples provided.
You will learn that visual-inertial odometry combines camera data with IMU sensors for robust state estimation when GPS is unavailable.
Obviously you will also learn that SLAM solves building a map while localizing within it. Trajectory optimization ensures planned paths respect vehicle dynamics and obstacle constraints.
MIT provides the theoretical foundation for autonomous systems: drones, self-driving cars, mobile robots.... for free. 🎓
‼️ Save it for later (or start learning today, I recommend this option more): vnav.mit.edu/
~~
♻️ Join the weekly robotics newsletter, and never miss any news → ziegler.substack.com
6
124
1,048
34,932
Apr 29
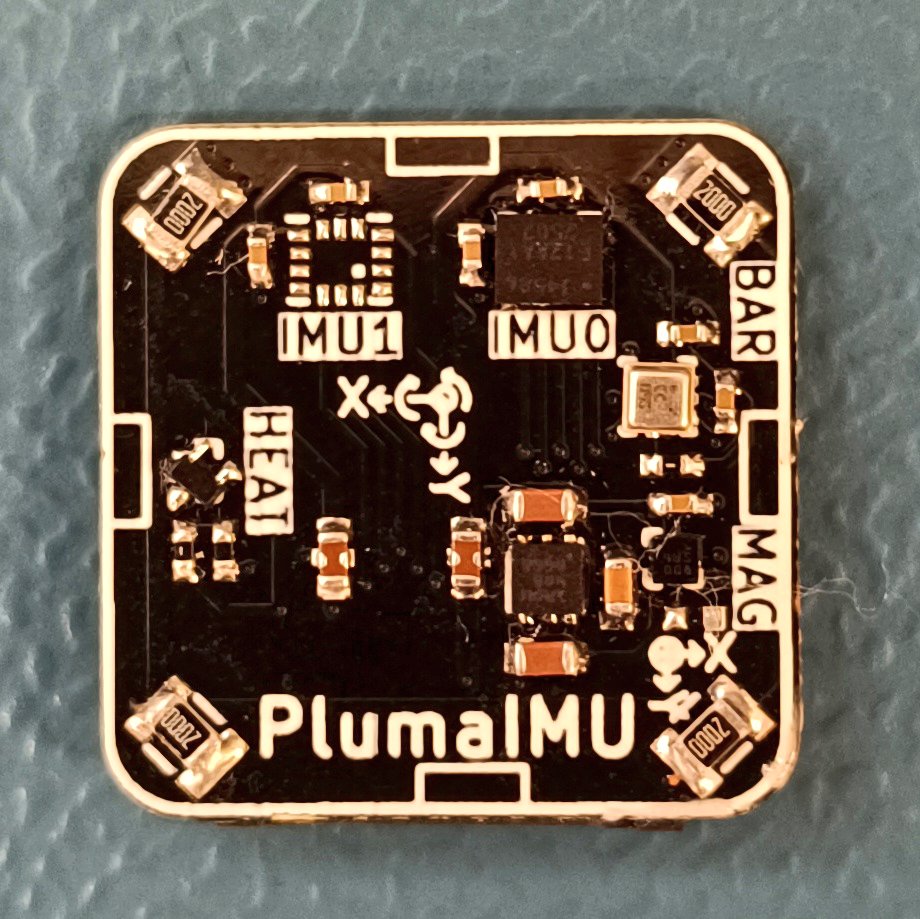
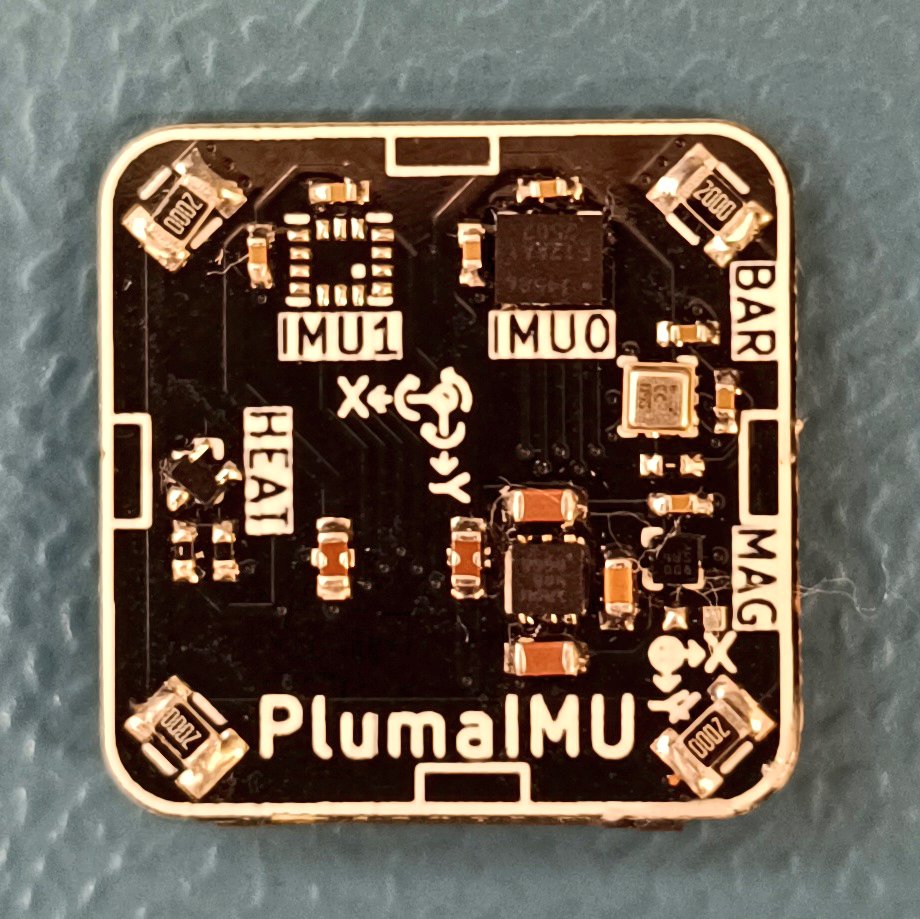
First picture of the external IMU board for my #PlumaN6 controller board. It has 2 IMU (only one soldered) on individual SPI and power buses, 1 Magnetometer, 1 Barometer (on shared I2C).
I also added 4 large resistors with MOSFET control to possibly temperature control the board.
1
1
8
214
Apr 27
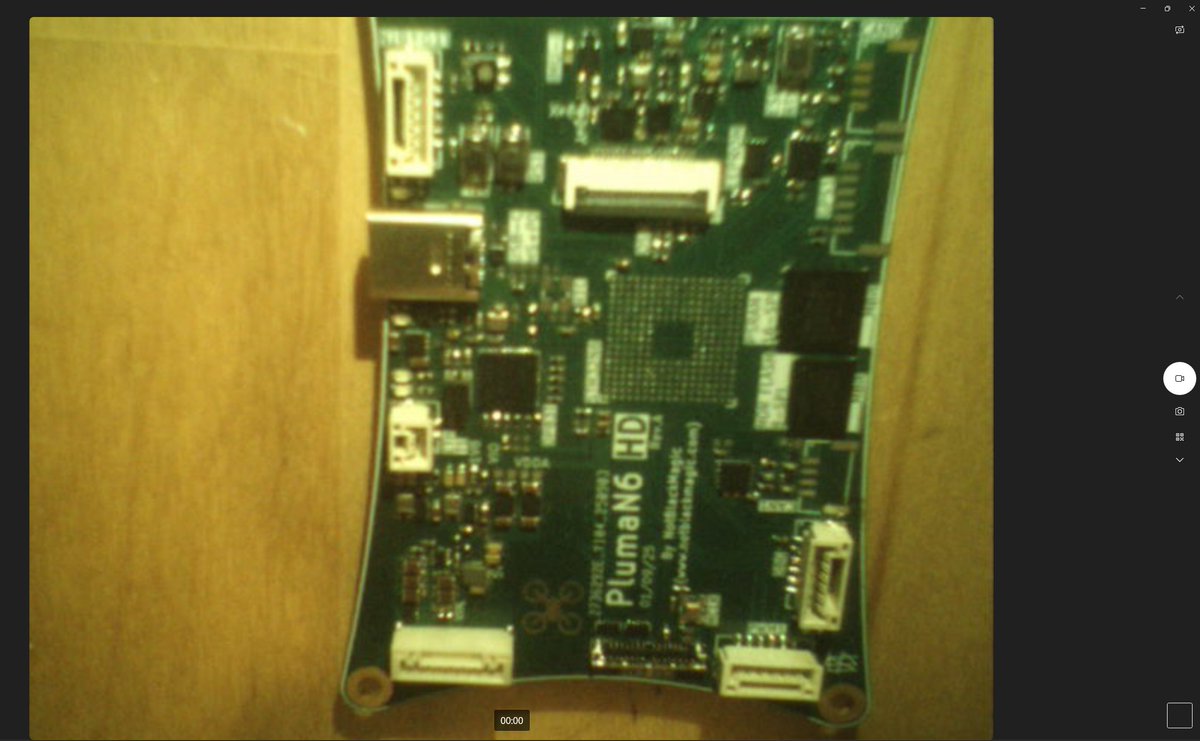
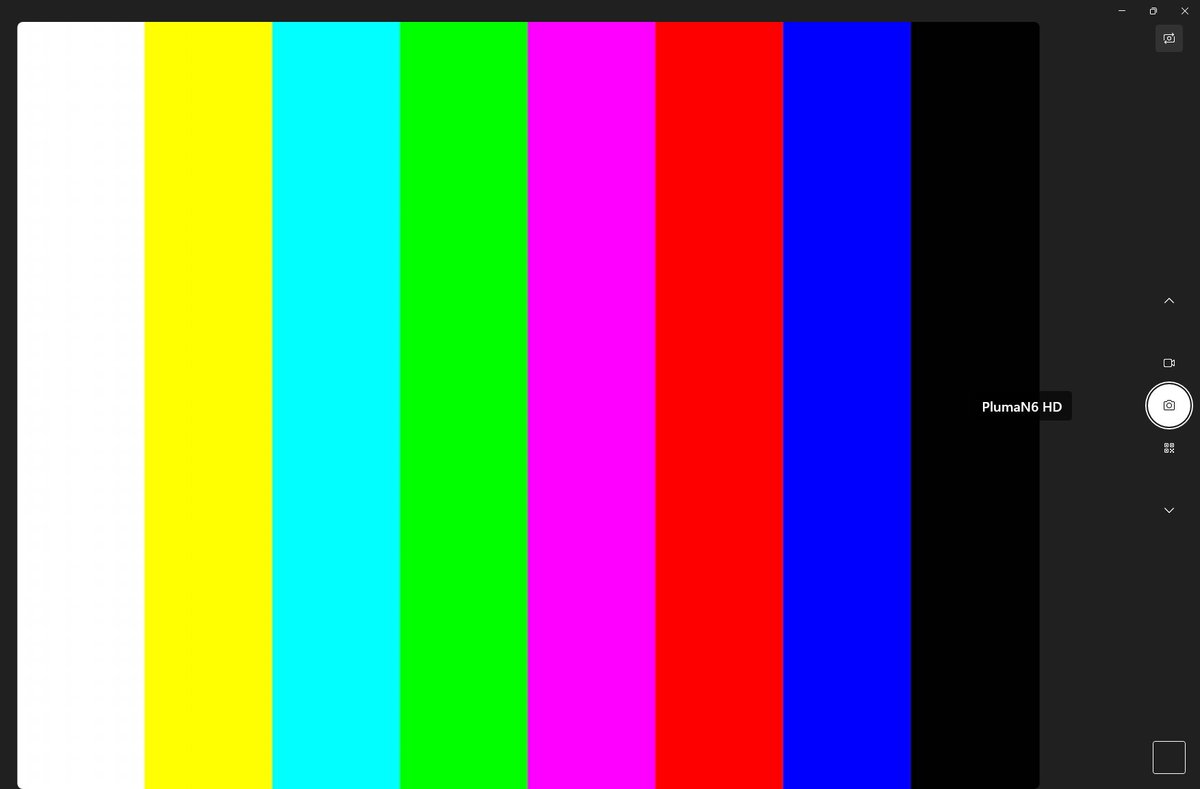
First test image over custom USB UVC driver from my #PlumaN6 board.
Test pattern generated on the board, not from a image sensor (yet).
1
3
169