
Info for current students, news about alumni, and interesting findings across campus and the web. All are welcome to follow!
Joined March 2013
- Tweets 511
- Following 100
- Followers 412
- Likes 252
141 Photos and videos











UBC Engineering Physics retweeted

Jun 13
My talk at MIT, on "Agentic AI systems: from scruffy to neat", is now available. I cover 3 examples of agentic systems - Bayesian linguistic forecaster, autoharness, and code world models - which combine LLMs, code and planners in different ways. Links below.
15
148
1,219
87,580

21 Jul 2023
Robot summer time trials are next week. Teams are staring to ramp up to 110% duty cycle. Robots are starting to show their real capabilities. As the saying goes "Have yet to see a design fail on paper."
2
1
147
Time passes quickly, different place, different robot, different problems. The invariant: table sitting.
Wait you had TWO keyboards!?!
2
UBC Engineering Physics retweeted

Jun 9
这可能是人类写给 AI 看的最后一篇论文了。
最近刷到Stanford、CMU、Michigan 等 37 位作者联名的论文:《The Last Human-Written Paper》。
核心观点很狠:沿用几百年的论文,在 AI 时代可能已经过时了。
作者点出了两个被我们忽视已久的“隐形税”:
一个是叙事税。为了讲一个漂亮故事,我们把失败实验、死路、被推翻的假设都删掉了。AI 读到的是“通关攻略”,却看不到真正有价值的“踩坑记录”。
另一个是工程税。论文里的实现细节通常足够说服审稿人,但不够让 Agent 直接复现。很多关键 tricks 还藏在作者脑子、代码注释和 Slack 记录里。
所以作者提出 ARA,直接把论文改造成 Agent 能读取和执行的“研究包”:不只告诉你结论,还把怎么想到的、代码怎么跑、证据链在哪、哪些路走不通都打包进去。
我觉得这篇最有意思的地方是,它不是在讨论 AI 怎么帮人写论文,而是在问:
当 AI 也变成论文读者和执行者时,论文还应该长成今天这样吗?
未来科研输出的核心,可能不再是“写得多像一篇 paper”,而是能不能被 AI 理解、复现、追踪和继续扩展。
人类写论文写了几百年,接下来可能要开始写给 Agent 执行的研究包了。
arxiv.org/pdf/2604.24658
134
508
2,388
242,807
UBC Engineering Physics retweeted

May 12
I've been coding for 40 years. Here are the top 5 things I wish I knew when I started.
1. 90% of the job is debugging and fixing, not creating new code. Which is still fun if you're good at it.
I used to think programming was mostly writing fresh, clever stuff. In reality, most of your time is spent in other people's (or your own past self's) messy code, chasing down why something that "should" work doesn't. Get really good at debugging early. Learn assembly reading, call stacks, and kernel debuggers. It pays off hugely. The best engineers I saw were absolute magicians at this.
2. Manage complexity from day one (ie: don't write slop and "fix it later" if it goes somewhere).
Very early on, I'd hammer out code and refactor afterward. Big mistake. Now I start with clean, skeletal structure (minimalism first) and flesh it out carefully, with AI or not.
Messy code compounds and becomes unfixable. Upfront discipline on architecture, naming, and simplicity saves enormous pain later, especially in large systems like Windows.
3. Tools and processes matter more than you think
We suffered with basic diff/manual deltas instead of modern source control like Git. Branching, testing, and good tooling would have made porting and collaboration way smoother. Invest in your environment, automation, and reproducible builds early. Good tools amplify your output; bad ones (or none) drag everything down.
4. Understand the problem and existing code deeply before writing
Don't jump straight to coding. Map out the problem, study what's already there (you'll inherit a lot), and plan. Low-level knowledge (hardware quirks, alignment issues on different architectures like MIPS/Alpha) was crucial. Also: assert early and often. It forces clarity.
5. People, politics, and "the right tool for the job" beat pure tech arguments.
Brilliant engineers still argue endlessly. Sometimes it's about ego, not merit. Learn to spot the difference and "steer" the conversation rather than "winning" it.
Bonus from experience: Side projects like Task Manager (started at home because I wanted the tool) can become your biggest hits. Ship small, useful things often. If you're just starting, focus on fundamentals, patterns over syntax, and building resilience for the long haul. It's going to be a wild ride, but the fundamentals still matter.
186
541
4,094
197,548
Who can beat this AI air hockey table?
youtu.be/ugwpCam1rd0?si=nOAu…
1
1
3
394
For an in depth discussion of the full reality stack see:
github.com/HudsonNock/Air-Ho…
1
77
And a few cool facts about the system.
* At full power the system can output above 4kW.
* To buffer the power supply we use a 163F capacitor.
* The RL algorithm outputs desired "trajectories" that are then passed onto a feed forward model (90%) and a feedback model (10%).
74
Very cool work from @SonyAI_global - especially this shot at 13:30 into the clip:
youtu.be/FrGq8ltb-_E?si=R0zY…
58
A good TV cast of the robot half-marathon race is here:
youtube.com/live/zqgc9C3cC6U
51
UBC Engineering Physics retweeted

Apr 19
Only one chance in this lifetime…
Like watching sunset at the beach from the most foreign seat in the cosmos, I couldn’t resist a cell phone video of Earthset. You can hear the shutter on the Nikon as @Astro_Christina is hammering away on 3-shot brackets and capturing those exceptional Earthset photos through the 400mm lens. @AstroVicGlover was in window 3 watching with @Astro_Jeremy next to him.
I could barely see the Moon through the docking hatch window but the iPhone was the perfect size to catch the view…this is uncropped, uncut with 8x zoom which is quite comparable to the view of the human eye. Enjoy.
4,085
44,998
263,138
19,119,246

UBC Engineering Physics retweeted

Apr 19
Another humanoid robot falls during a live marathon.
The impact shows how heavy it is.
52
94
807
137,469
UBC Engineering Physics retweeted
Apr 19
2026 Robot marathon fail & fun compilation
84
364
2,209
222,288


TienKung Ultra finished the full 21.0975 km in 1:15:00 — fully autonomous, zero human intervention. 🤖
No repeat win this time.
But it was easily one of the most striking robots on the course —
clean gait, stable motion, and the most human-like running form out there.
It took home the “Best Design” award,
and that actually says more than the podium this time.
Because this isn’t a marathon-only build.
TienKung Ultra is a general-purpose humanoid,
already moving toward real-world deployment.
And it didn’t show up alone.
Teams from Peking University, Fudan, HUST, BIT, Beihang, HKUST(GZ), TUM and more
were all building on the same TienKung platform.
That’s what an open ecosystem looks like —
shared hardware, shared stack, different solutions on top.
And just a day before, it took the Robot Warrior Challenge —
fully autonomous through obstacle tasks modeled on real-world rescue and hazardous operations.
That’s the part that matters.
This is no longer just about speed.
It’s about autonomy — and whether these systems can actually handle real environments.
That’s what future winners are going to look like.

50:26. Let that sink in — a humanoid just won the Beijing half marathon at a pace faster than the human world record. 🤯
The winner, “Lightning” from the Monkey King team, didn’t just finish — it ran a sub-51 minute race, while the human record sits at 56:42.
This one is built for speed — around 169 cm, mech-style design, optimized for aerodynamics and burst power.
There are two versions: remote-controlled and fully autonomous.
And yes, the autonomous one can actually navigate and hold that pace.
At this point, the conversation really changes.
It’s no longer about whether robots can run long distance —
it’s about how fast they can push past human limits.
57
484
1,881
224,301
Hopefully many of you got to watch clips from the robot half marathon in Beijing.
If not here are some interesting posts.
25
Thank you Emiko and @ubcengineering for putting this video-tour together. :)
Auto-caption has mislabeled "our optical projects" to "our obstacle projects". Oh well.
1
50
In the age of generative LLMs "ephemeral software" is taking over.
From an antenna design or an Arduino solution to a telemetry dashboard or a spreadsheet analysis of financials. We won't save implementations to reuse. LLMs will create the functionality from scratch on demand.
1
52
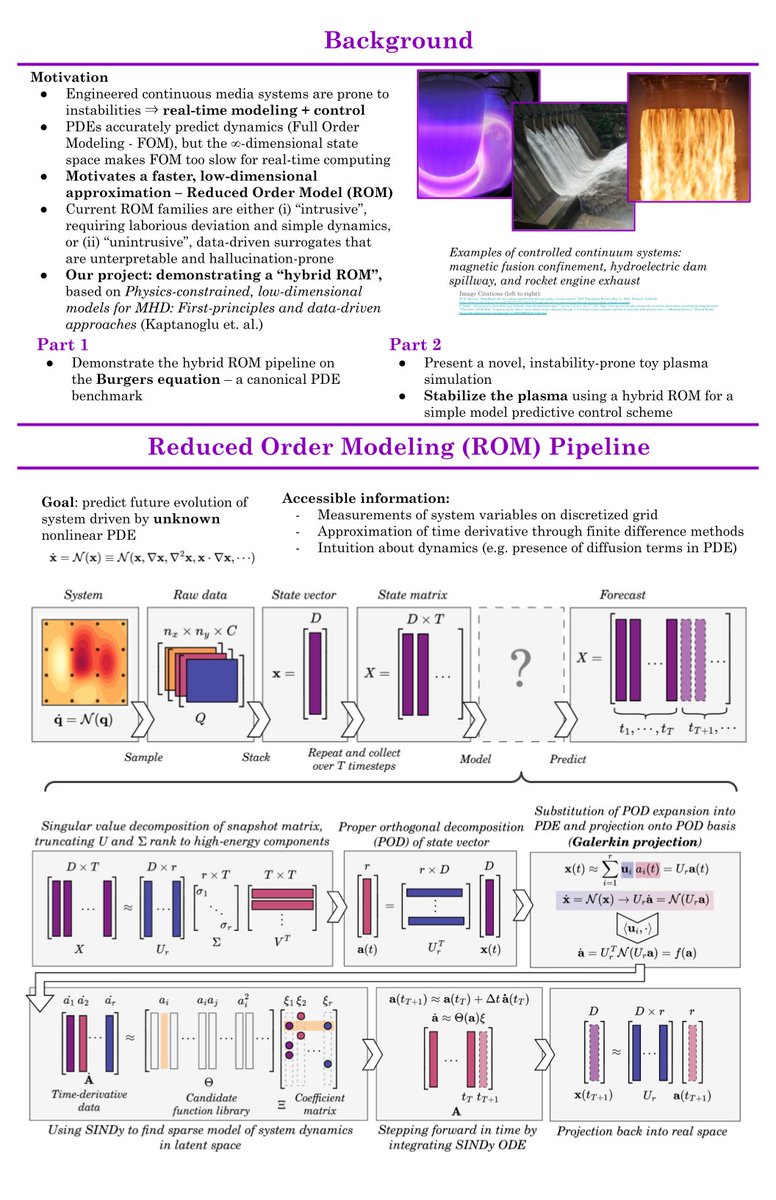
@tate_mccartney, Oksana and @rishilandra developed a hybrid Reduced Order Modelling controller, based on Physics-constrained, low-dimensional models for magneto hydrodynamics using first-principles and data-driven approaches.
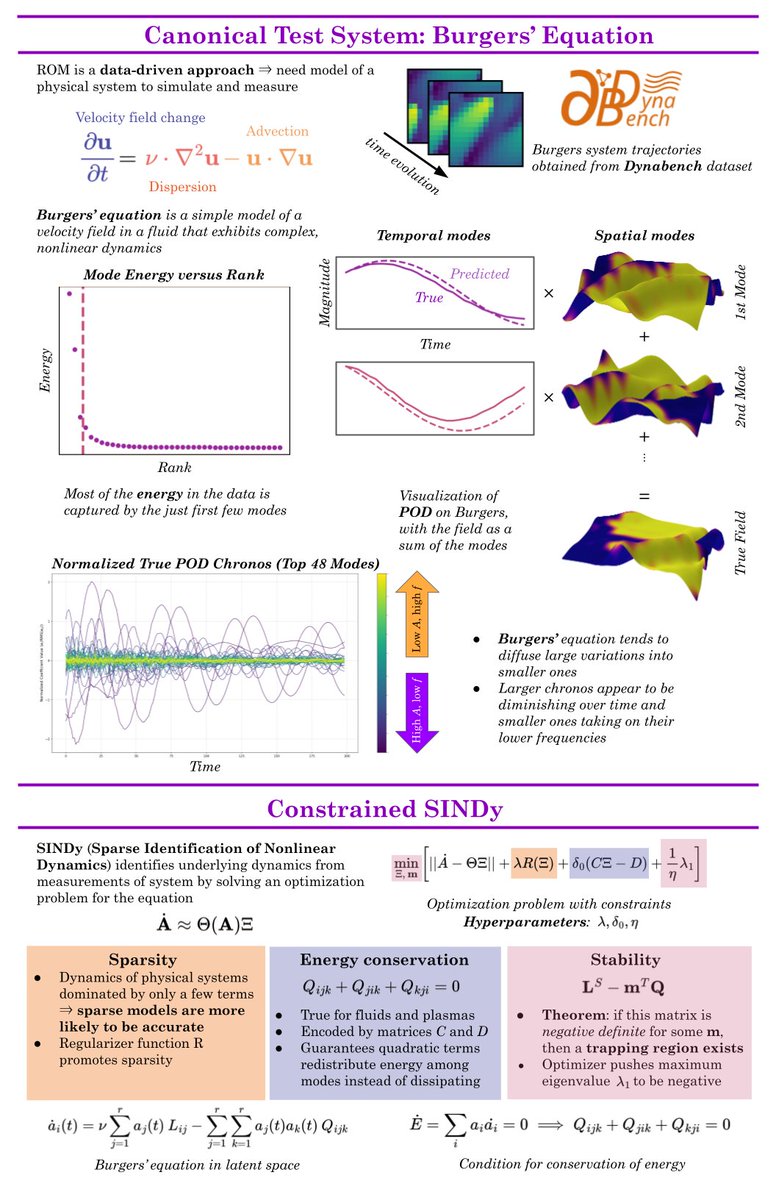
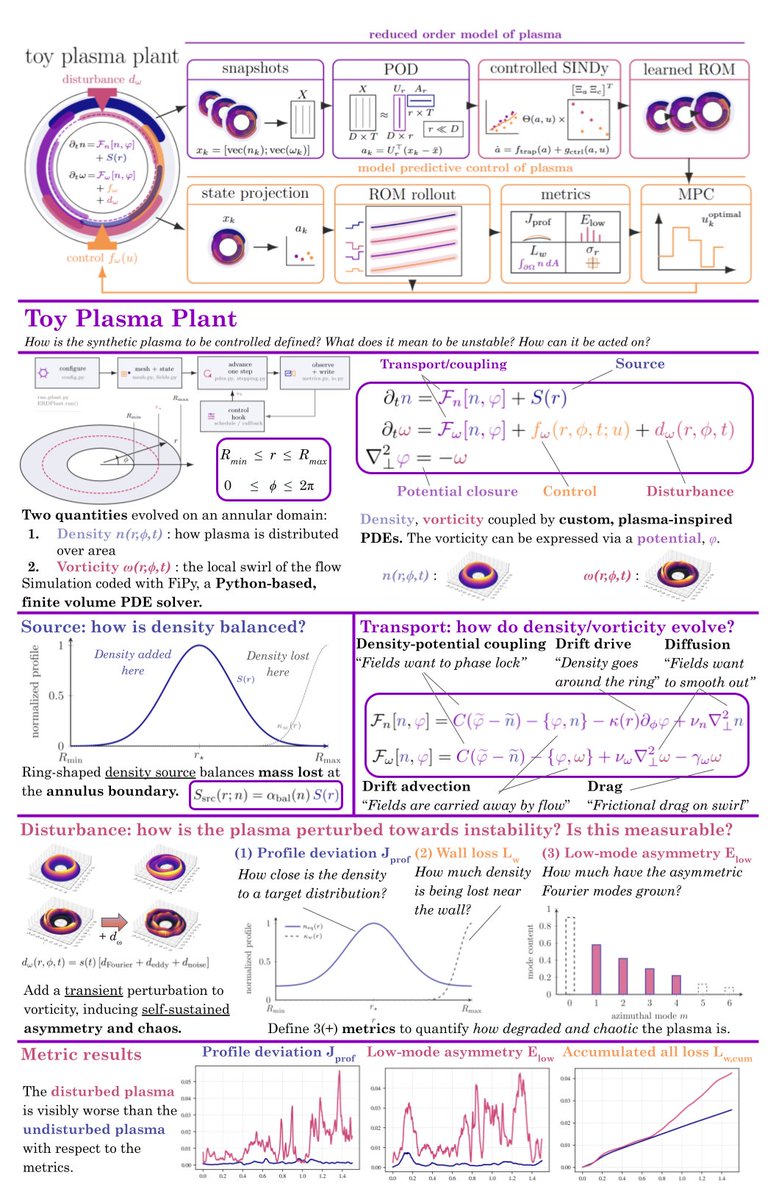
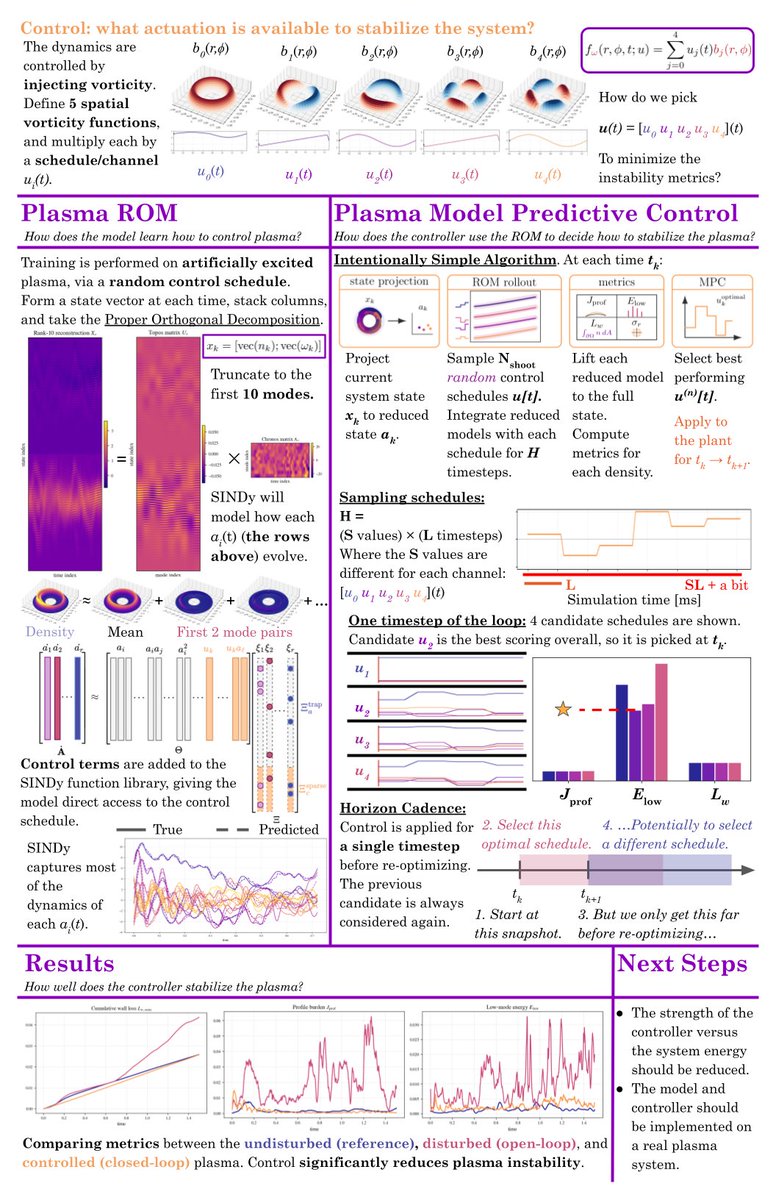
1
1
2
44
Then they showed they can stabilize a simple plasma simulation with it.
Their work builds on the research of Alan Kaptanoglu and Steven Brunton (@eigensteve).
1
39