
AI Ph.D. at Oregon State | Automated driving at Ford
Joined June 2019
- Tweets 27
- Following 307
- Followers 24
- Likes 204
5 Photos and videos
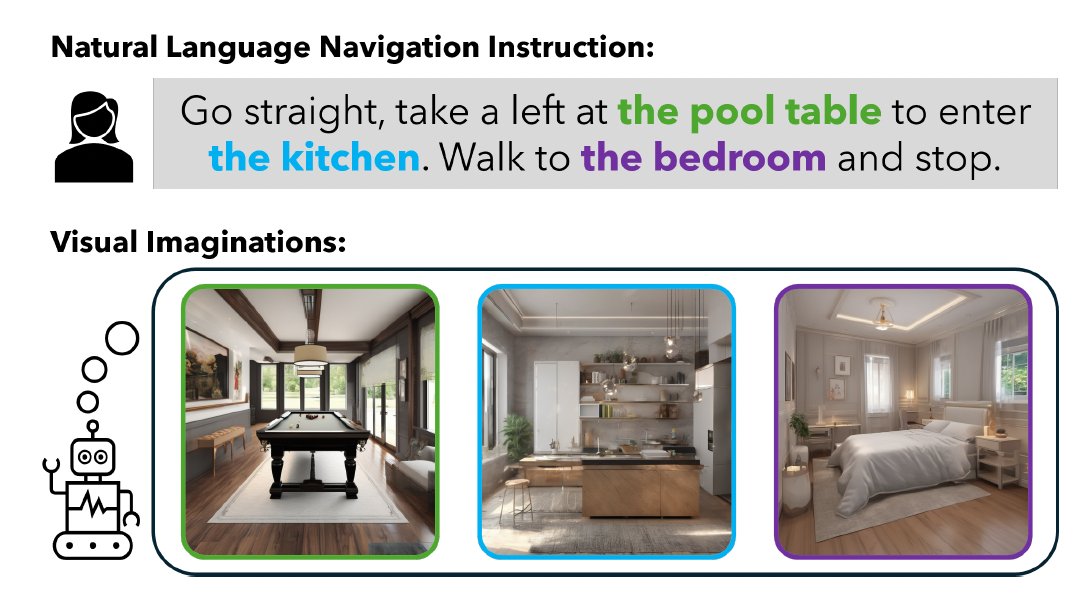

Excited to share our work to appear at #CVPR2025! This work in collaboration with @jacob__krantz and @stefmlee investigates if visual representations (imaginations) of natural language instructions can improve performance of vision-and-language navigation (VLN) agents.
TL;DR-yes
1
1
3
371

We are grateful to all of the 17,491 reviewers who helped make #CVPR2026 possible. We are especially pleased to recognize the following Outstanding Reviewers, whose high-quality reviews (as judged by their Area Chairs) placed them among the top 5% of reviewers.
5
43
224
96,373
Akhil retweeted

4 Oct 2025
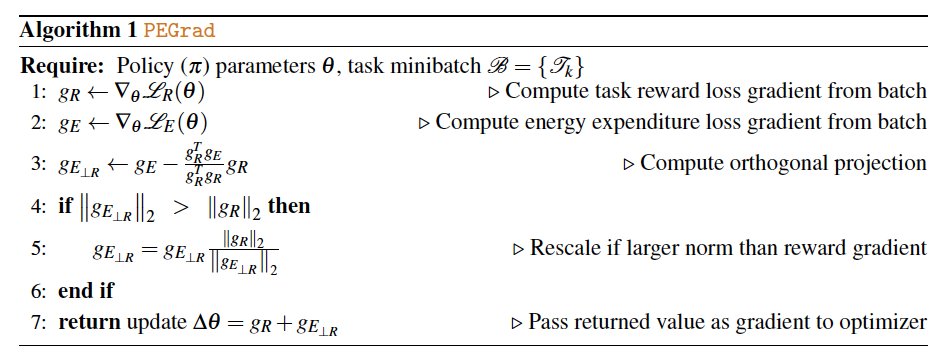
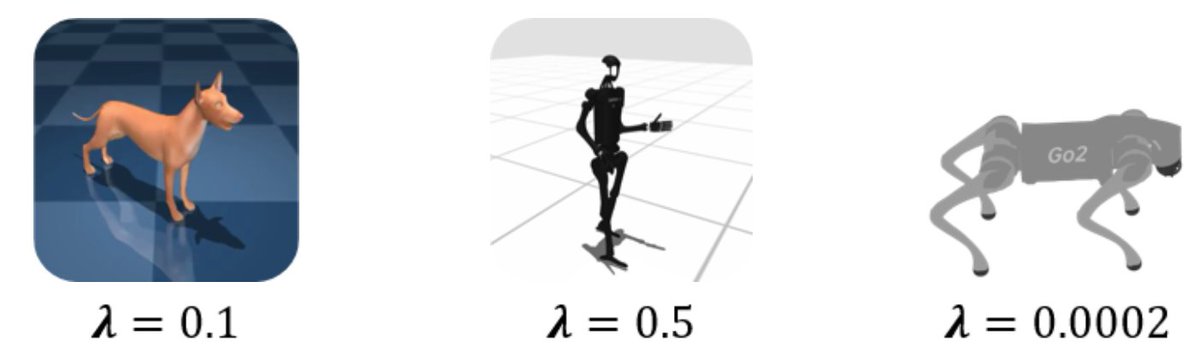
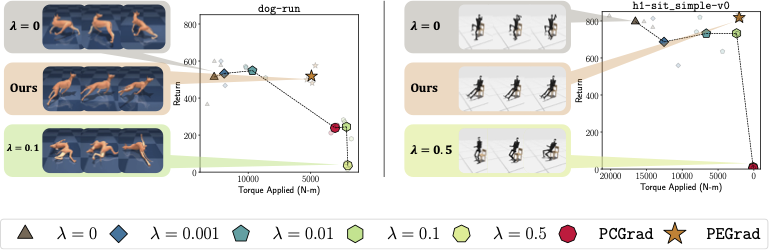
Introducing PEGrad, a hyperparameter-free method for energy-efficient robot control. By projecting energy gradients orthogonal to task rewards, it cuts energy use by up to 64% without hurting performance. Demonstrated on DM-Control, HumanoidBench, and real Unitree GO2 robots,
1
1
12
154
Website: pvskand.github.io/projects/P…
Paper: Non-conflicting Energy Minimization in Reinforcement Learning based Robot Control - arxiv.org/abs/2509.01765
31
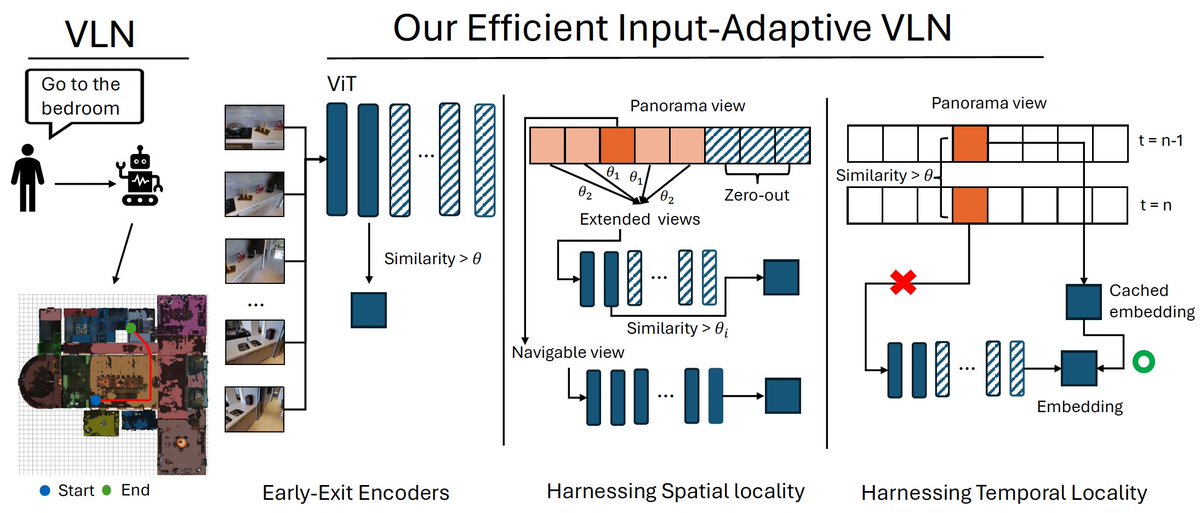
Happy to share that our collaborative work, “Harnessing Input-Adaptive Inference for Efficient VLN” has been accepted to #ICCV2025 ! 🤖
Paper: arxiv.org/pdf/2508.09262
(contd.)
1
56

Excited to share our work to appear at #CVPR2025! This work in collaboration with @jacob__krantz and @stefmlee investigates if visual representations (imaginations) of natural language instructions can improve performance of vision-and-language navigation (VLN) agents.
TL;DR-yes
1
1
3
371
Finally, they are encoded along with other modalities in a cross-modal encoder to sample agent actions. We observe performance improvements across agents and natural language instruction granularities. For more details, our work is available at akhilperincherry.com/VLN-Ima….
49