
Percept AI | Associate Professor for Robotics and Machine Learning at Arizona State University. Director of Interactive Robotics Lab.
Joined November 2016
- Tweets 235
- Following 529
- Followers 1,452
- Likes 2,794
54 Photos and videos









Pinned Tweet

19 Oct 2023
I am a Googler! 😀
Happy to say that I joined @GoogleDeepMind as a Visiting Faculty Researcher for my sabbatical. I am extremely delighted to work with some of the smartest and kindest people on the planet. If you are also in the Bay Area and want to grab coffee, let me know :)

16
6
327
32,758
Jun 10
[Update Hiring] I am excited to be working with Percept AI on next-generation Computer Vision and Spatial Intelligence for Robotics! 🤖
We're hiring a CV and 3D Perception Engineer! If you are into Gaussian Splatting, ML for Perception, VLM, etc. Apply: indeed.com/job/computer-visi…
1
31
1,802
Jan 11
5 yrs ago at NeurIPS we introduced "Language-conditioned imitation for robot manipulation" and one of the first VLAs. Back then there was some pushback. Today, VLAs are the hottest topic with multi-billion $ startups. Yet, there's still some basic research needed in my opinion!
1 Dec 2020

Want to teach your robot new tricks with NLP and Deep Learning? We are posting the full source-code to our NeurIPS 2020 paper along with an easy, hands-on tutorial on Medium - lots of explanations and videos!
Github Code: github.com/ir-lab/LanguagePo…
Medium: sstepput.medium.com/teach-yo…
10
449
27 Dec 2025
Tell Harkins to reopen the Valley Art Theater in Tempe - Sign the Petition! c.org/z4gPZJfGtB via @Change
2
268
8 Dec 2025
[Free Tutorials] Introduction to In-Context Learning for Agentic AI 🤖
Website: intro-to-icl.github.io
We provide a beginner-friendly tutorial on In-Context Learning with Colab code. Demos incl. optimization, regression, classification, RL, translation and many others! #LLM
8
110
571
49,893
26 Nov 2025
NeurIPS 2025 Paper: LLMs are Reinforcement Learners 🤯!
Surprisingly, we show that LLMs can solve RL tasks without any external component! We introduce Prompted Policy Search (ProPS), an RL method based only LLMs and in-context learning.
[Paper] props-llm.github.io
6
43
194
51,241
26 Nov 2025
Please also check out our website and tutorials below. The tutorials are all implemented in Colab and can be run online with a free Gemini account:
[Tutorial1] colab.research.google.com/dr…
[Tutorial 2] colab.research.google.com/dr…
1
3
10
1,261
26 Nov 2025
This was a fun project together with colleagues from @ASUEngineering and @ProcterGamble.
All your RL are belong to LLM 😀
5
768
1 Nov 2025
The one and only @gauravsukhatme at the Southwest Robotics Symposium at Arizona State University. We are extremely grateful for his visit!
1 Nov 2025

Enjoying the Southwest robotics symposium @ASU @ASURobotics @jd_knight @asurobot @nakulgopalan

5
369
6 Oct 2025
Southwest Robotics Symposium (Oct. 31 - Nov. 1) at ASU. SWRS is a premier symposium on all forms of robotics and attendance is absolutely free! Please visit us in Phoenix :) swrobotics.engineering.asu.e… #ASU #Robotics #ML #HRI
1
3
16
1,852
14 Aug 2025
Honored and grateful to have received the ASU Fulton Schools of Engineering "2024 Best Teacher Award". Teaching undergraduate and graduate level classes has been an extremely rich and rewarding experience. A big thank you to Dean Dr. @KyleSquires and all the @SCAI_ASU colleagues!
6
3
46
2,294
10 Aug 2025
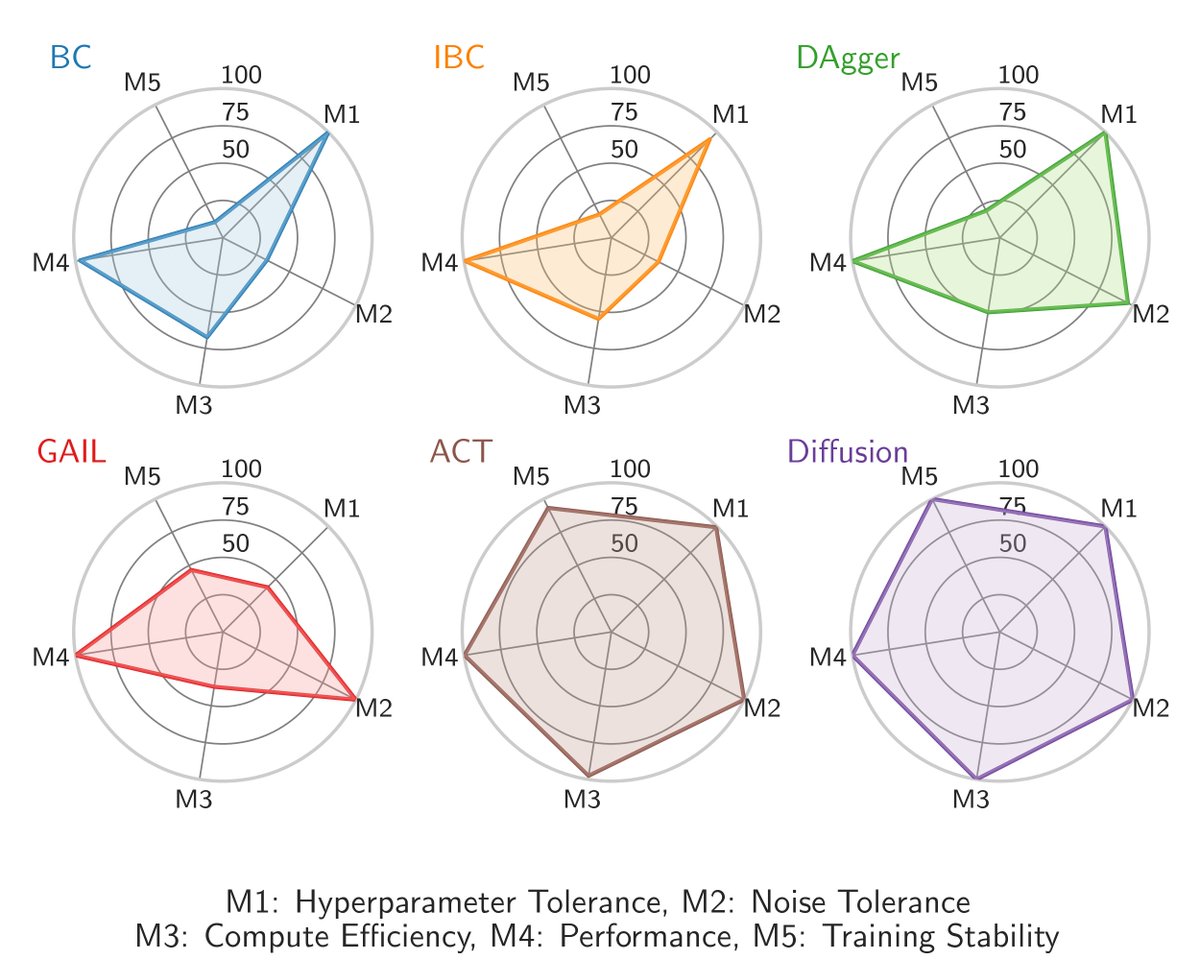
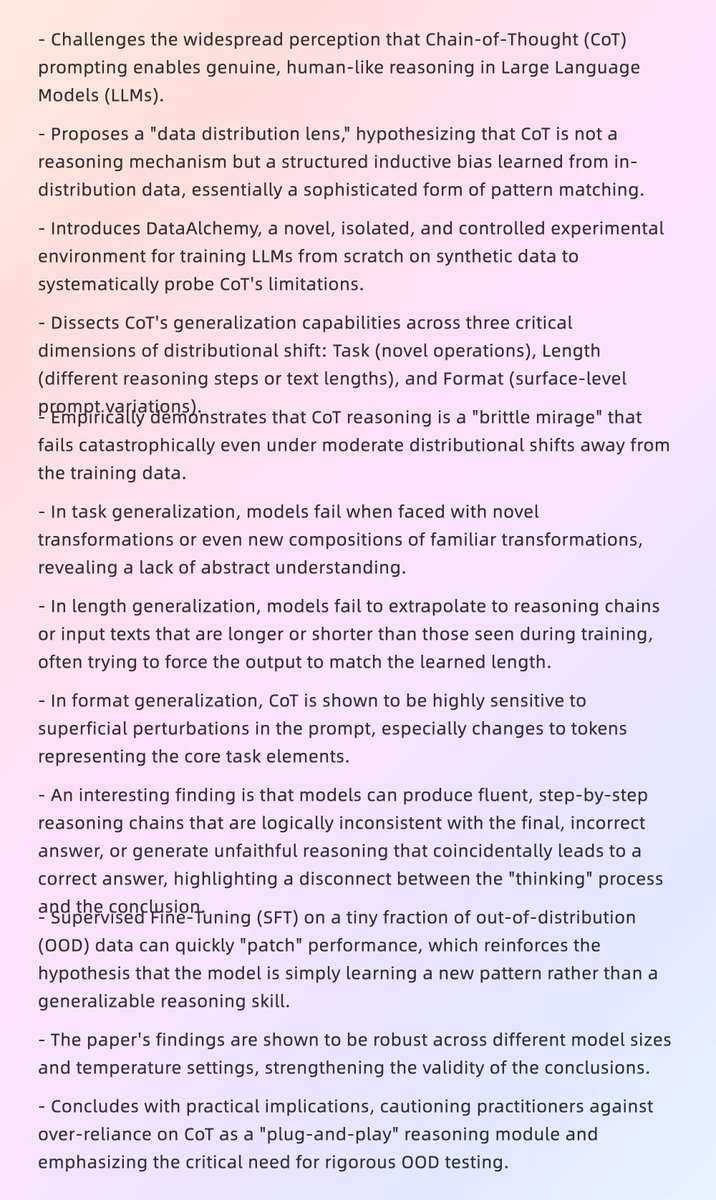
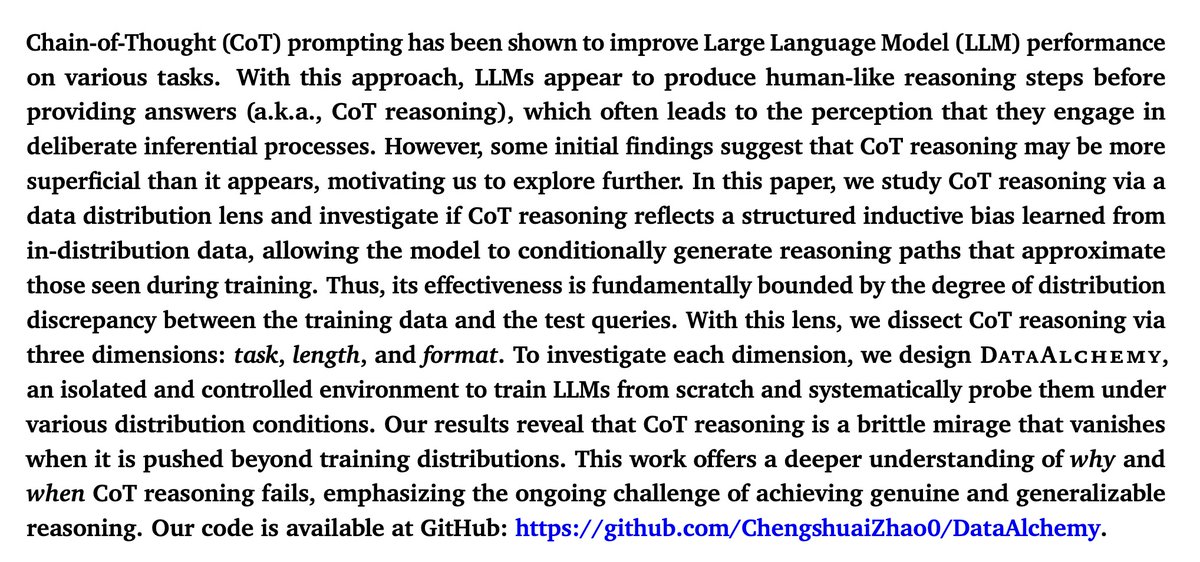
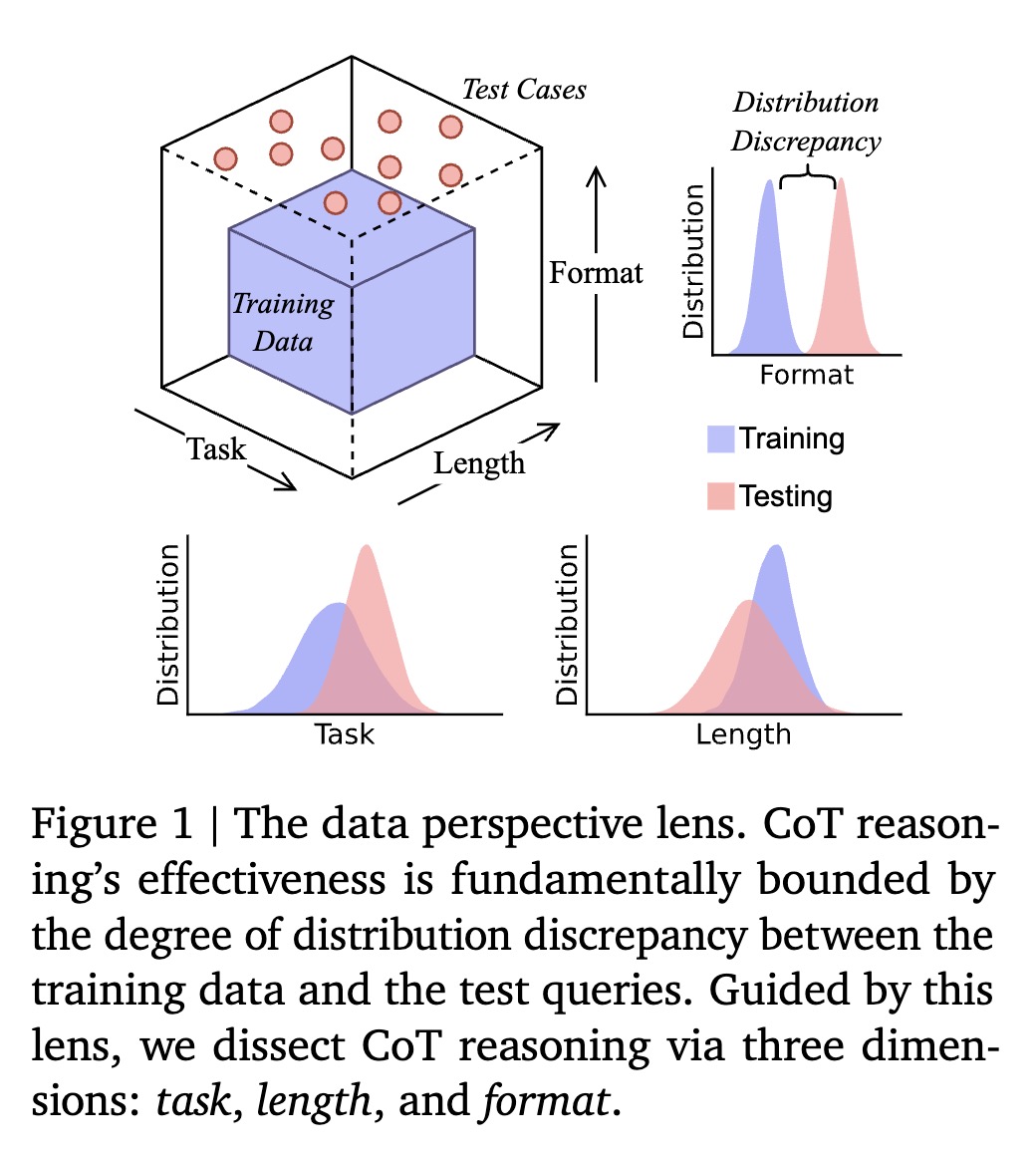
Must read for anyone doing Chain-of-Thought: recent paper on LLMs and CoT out of ASU.

[LG] Is Chain-of-Thought Reasoning of LLMs a Mirage? A Data Distribution Lens
C Zhao, Z Tan, P Ma, D Li... [Arizona State University,] (2025)
arxiv.org/abs/2508.01191

1
11
776
2 Aug 2025
My colleagues at DeepMind are looking for new hires. These are some of the best positions in the industry. Please apply!
2 Aug 2025

It takes a village to build an awesome 🦾 🧠 . We are #hiring! Come transform robotics at Google DeepMind. I've received a lot of request for applied and engineering roles. Indeed we are hiring for those too!
Robotics engineering:
lnkd.in/gDt6CeAq
Applied ML SWEs:
lnkd.in/gCmY69XQ
Research Scientist:
lnkd.in/g47zS2Xz
1
8
1,264
23 Jul 2025
I really like this video from our recent article on robot self-improvement @GoogleDeepMind . We (with @pannag_) describe how self-play, LLM-based training and self-improvement can be used to scale-up robot learning. Check it out: spectrum.ieee.org/deepmind-t… #Deepmind #ASU
7
27
1,134
23 Jul 2025
Self-improvement for robotics @GoogleDeepMind:
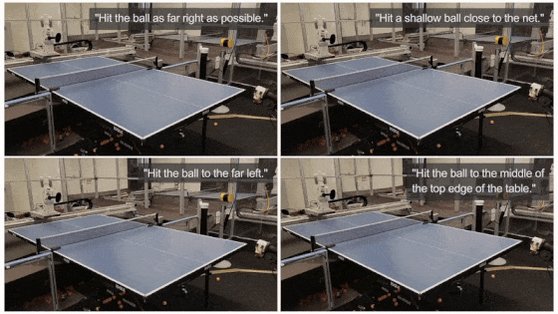
In this article, I describe together with @pannag_ recent research on robot self-improvement, LLM-based training, and self-play. We had fun trying this on a table tennis robot. Article: spectrum.ieee.org/deepmind-t… #Deepmind #ASU
1
1
9
742
20 May 2025
We are presenting our paper on LLMs for robot self-improvement for robot table-tennis tomorrow at ICRA 2025! Looking forward to see you all. #Deepmind #ASU
20 May 2025

4/11
3️⃣ SAS-Prompt: Large Language Models As Numerical Optimizers for Robot Self-Improvement Session: Representation Learning 4 When: Wed May 21 | 16:45 - 16:50 Where: Room 311 | WeET8.3 (collab w/ @asurobot and group)
1
16
914
30 Apr 2025
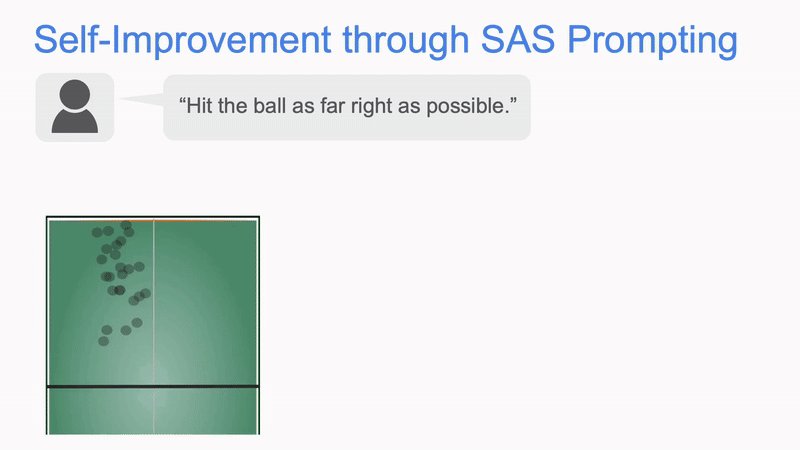
Gemini now coaches table tennis robots 🤖🏓:
In our latest paper, we introduce SAS Prompt – a technique for robot self-improvement with LLMs. Here is how it works 🧵
2
8
38
49,713
30 Apr 2025
We believe this is a significant step towards more intuitive and self-improving robotic systems based on the prowess of LLMs like Gemini!
Checkout our video: youtube.com/watch?v=BHv1rjJJ…
and website: sites.google.com/asu.edu/sas…
1
1
6
422
30 Apr 2025
A BIG thanks to all collaborators: @lgraesser3 @Evo_Daveo @pannag_ @atiliscen @SCAI_ASU @KamaleshKali777 @yfzhoucs
1
2
11
515