
Joined October 2023
- Tweets 25
- Following 16
- Followers 54
- Likes 0
8 Photos and videos





ASU Robotics retweeted

1 Nov 2025
It was lots of fun catching up with some old friends and colleagues who were in town for the South West Robotics Symposium organized by my @ASURobotics colleagues (h/t @nakulgopalan). Matthias Scheutz, @DrScaz, @gauravsukhatme, @karpase (w/ Yochanites @biswas_2707, @durgesh_kalwar, @PalodVardh12428 & @sachingrover)




29 Oct 2025

ASU robotics is hosting SWRS again this year on Oct 31st and Nov 1 with a great slate of speakers at Memorial Union on ASU's campus. Our keynote speakers are Brian Scassellati (@DrScaz) and Gaurav Sukhatme (@gauravsukhatme). The full list of speakers is at swrobotics.engineering.asu.e…
4
22
3,218
ASU Robotics retweeted

1 Nov 2025
Enjoying the Southwest robotics symposium @ASU @ASURobotics @jd_knight @asurobot @nakulgopalan

1
14
1,585
ASU Robotics retweeted
1 Nov 2025
Thanks @ASURobotics colleagues for the wonderful organization and lively discussion! @rao2z @asurobot @spring_berman @huang21608 @jd_knight @LindsaySanneman @jinwanxin @kunalgarg94 @JiefengS @Ransalu



1 Nov 2025

Enjoying the Southwest robotics symposium @ASU @ASURobotics @jd_knight @asurobot @nakulgopalan
1
2
13
698

31 Oct 2025
How to stack stones with robots to make a walls or structures? Nils Napp shares some impressive robot capabilities in his talk at SWRS.
1
31
31 Oct 2025
An exciting Plenary talk on socially assistive robotics by @DrScaz at SWRS. There was a great discussion on challenges in deploying robots in homes and the use of LLMs in socially assistive settings.
1
88
29 Oct 2025
ASU robotics is hosting SWRS again this year on Oct 31st and Nov 1 with a great slate of speakers at Memorial Union on ASU's campus. Our keynote speakers are Brian Scassellati (@DrScaz) and Gaurav Sukhatme (@gauravsukhatme). The full list of speakers is at swrobotics.engineering.asu.e…
1
2
2
3,465
ASU Robotics retweeted

20 Sep 2024
Work from our lab with Weiwei Gu (weiweigu1998.github.io/), Suresh Kondepudi and Lixiao Huang covered by Techxplore. The work aims to connect human robot dialog and continual visual skill learning with real users. @SCAI_ASU @ASURobotics
19 Sep 2024

Computational approach could continually teach robots new skills via dialogue @arxiv techxplore.com/news/2024-09-…
4
8
572
29 Aug 2024
#SouthwestRoboticsSymposium2024 This year's theme is "Robotics for Social Good." Our speakers will feature leaders in the fields of Planning & Learning, Safety, Medical Robotics, Human-Robot Systems, and Soft Robotics. Check out the lineup of our speakers: swrobotics.engineering.asu.e…
1
2
141
29 Aug 2024
#SouthwestRoboticsSymposium2024 will be held on Oct. 31-Nov. 1, 2024, at Arizona State University’s Tempe campus! @ASU. For more details and to register, visit swrobotics.engineering.asu.e…!
#Robotics #Innovation #TechSummit #SWRS2024 #ASU
2
4
420
8 Nov 2023
Nakul Gopalan (@nakulgopalan ) gave a talk about "Interactive Task Learning" at the Workshop on Learning Effective Abstractions for Planning (leap-workshop.github.io/) at CoRL 2023 #CoRL2023
2
7
354
ASU Robotics retweeted

5 Nov 2023
Looking forward to presenting tomorrow at the #CoRL soft robot learning workshop, where I'll be discussing multimodal learning for soft robots!
Website: alpha-mdf.github.io
Location: Hub 2
time: 2:30-3:30 pm
Acknowledge my co-authors: Yifan @yfzhoucs , and Heni @asurobot
3
4
408
ASU Robotics retweeted

2 Nov 2023
Kalman Filtering Deep Attention Models = LOVE ❤️
#CoRL '23 paper: we identify a link between Kalman filters and neural attention mechanisms. Idea: the Kalman-gain is a form of attention! No need to tweak parameters. Check website and code: alpha-mdf.github.io @ASURobotics
2
37
261
19,049
31 Oct 2023
The Interactive Robotics Laboratory at ASU was a finalist for the IROS Best RoboCup Paper Award. Fabian Weigend, Shubham Sonawani, Michael Drolet and Heni Ben Amor (@asurobot) presented robot control from the sensor data of a single smartwatch.
1
1
192
31 Oct 2023
This enable robot data collection at scale with novice users remotely! Paper, and code at
[1] arxiv.org/pdf/2306.13192v2.p…
[2] github.com/wearable-motion-c…
106
5 Oct 2023
Andrew Boateng (@lifesnr) from CRSLAB presented his work with Dr. Wenlong Zhang (@asuriselab) and Dr. Yu Zhang (@Yu_Tony_Zhang) — “Implicit Projection: Improving Team Situation Awareness for Tacit Human-Robot Interaction via Virtual Shadows” at IROS this year. #IROS2023
2
207
4 Oct 2023
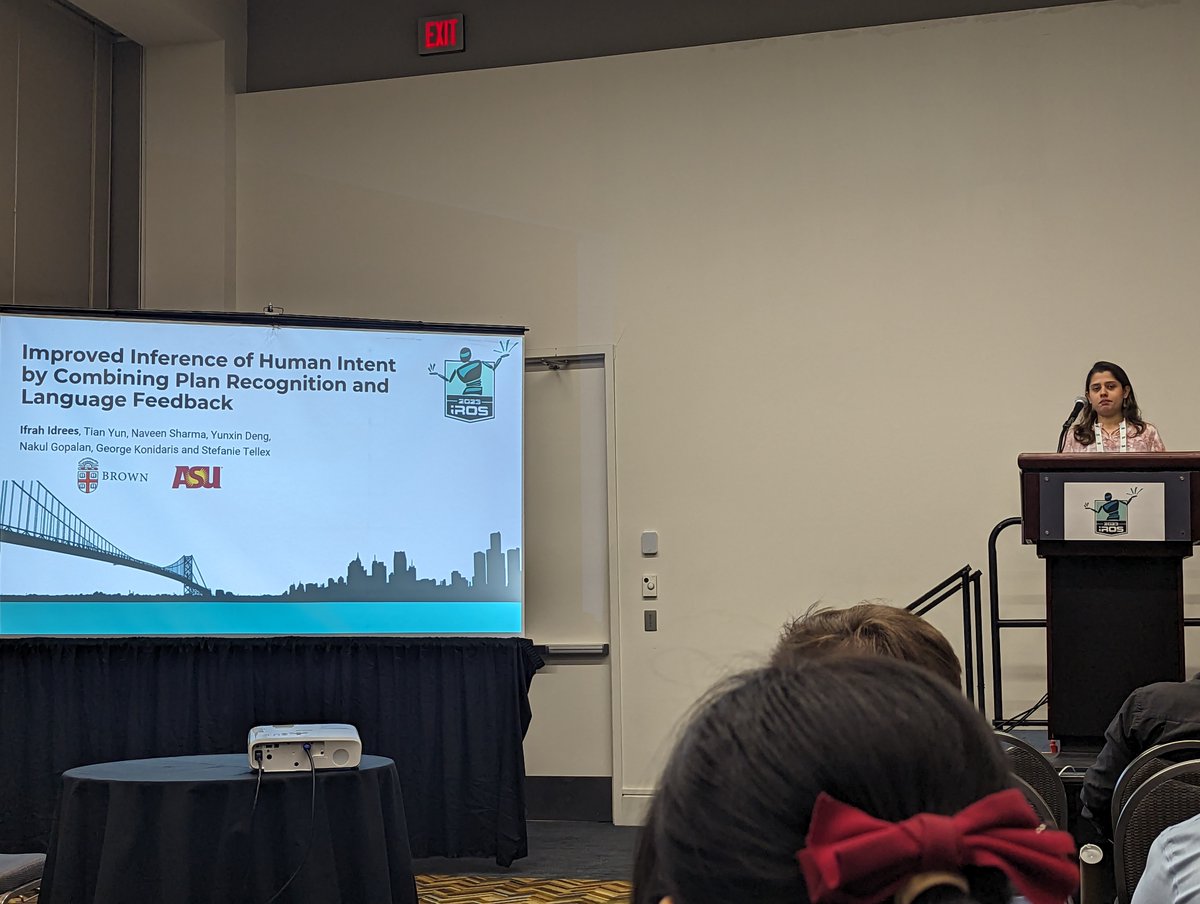
Ifrah Idrees (@IfrahIdrees) just presented work with Prof Gopalan (@nakulgopalan) -- Improved Inference of Human Intent by Combining Plan Recognition and Language Feedback at IROS 2023! Videos here - youtu.be/Om91zBiDDEY?si=82_W…
3
11
1,492
4 Oct 2023
Fuchen Chen, from the IDEAlab at ASU, presented on "Development of a Dynamic Quadruped with Tunable, Compliant Legs" on Monday at IROS2023. The robot can trot at 0.52 m/s or 4.4 body lengths per second with a 3.2 cost of transport (COT)!
4
139
2 Oct 2023
📢Check out Keyvan's @k1mjd abstract on Safety-aware Expansion for Neural Network Repair presented at the @ieeeiros workshop on formal methods techniques in robotics systems: tinyurl.com/iros-w-23
From Prof. Heni Ben Amor's lab @asurobot #IROS2023
1
7
346
1 Oct 2023
Xiao @liuxiao1468 from Prof. Heni Ben Amor’s lab (@asurobot) is presenting his work on Differentiable Ensemble Kalman Filters which leverages Deep Learning with classical Bayesian models. Check it out at IROS2023 #IROS2023
1
3
245
ASU Robotics retweeted

1 Oct 2023
We are at @ieeeiros! My student Weijia Tao will present WHOPPEr Drone, which uses its compliant body to perch and transport objects (TuAT4, 140D). I will present our work with @spring_berman's team on configuration tracking control of soft robotic arm (MoAT6, 140FG)! #IROS2023
2
1
23
1,373