
Assistant Professor at The Hong Kong University of Science and Technology (Guangzhou), working on Robotics, Embodied AI and Cyber-Physical-Systems
Joined October 2013
- Tweets 13
- Following 228
- Followers 67
- Likes 68
6 Photos and videos

Changhao Chen retweeted

Jun 10
100
1,168
7,139
2,026,068

Jun 6
We're also presenting a poster paper at #CVPR2026:
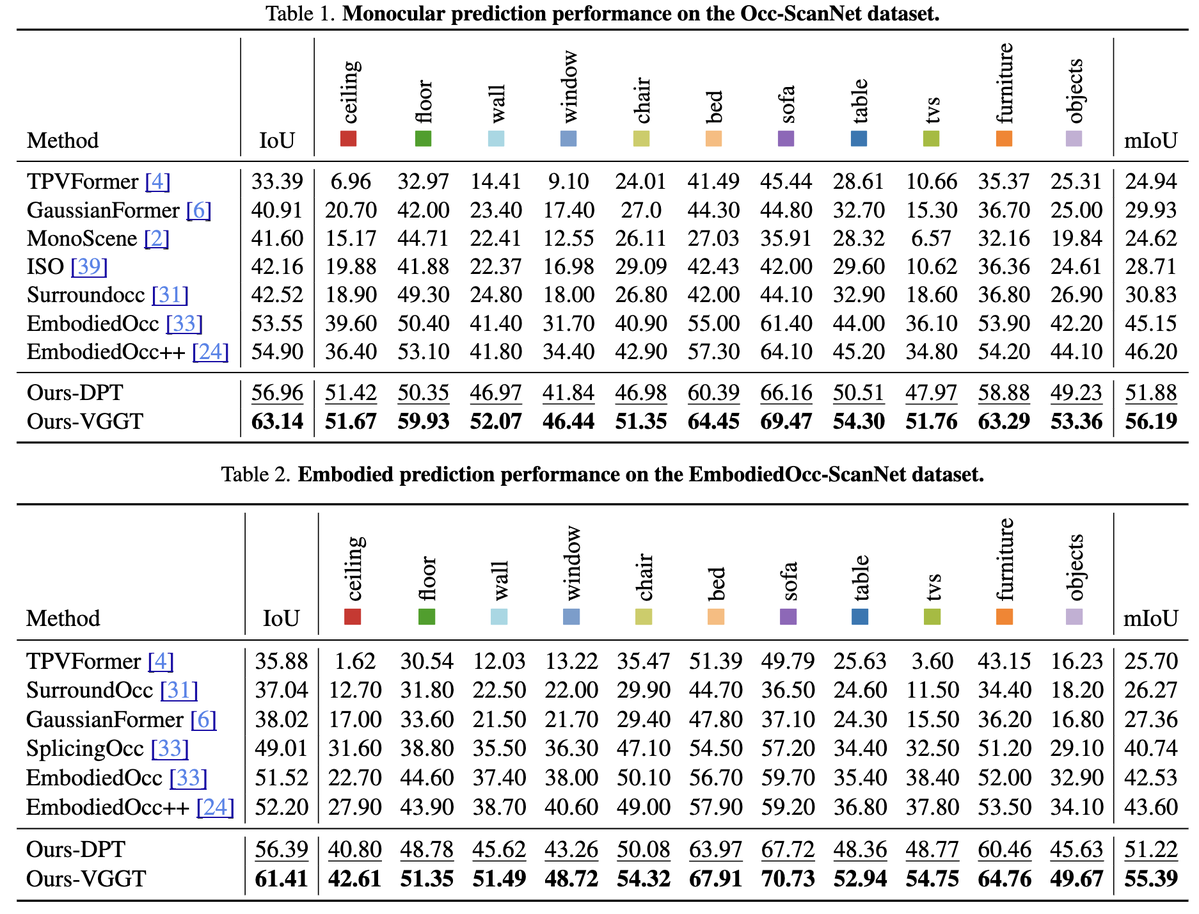
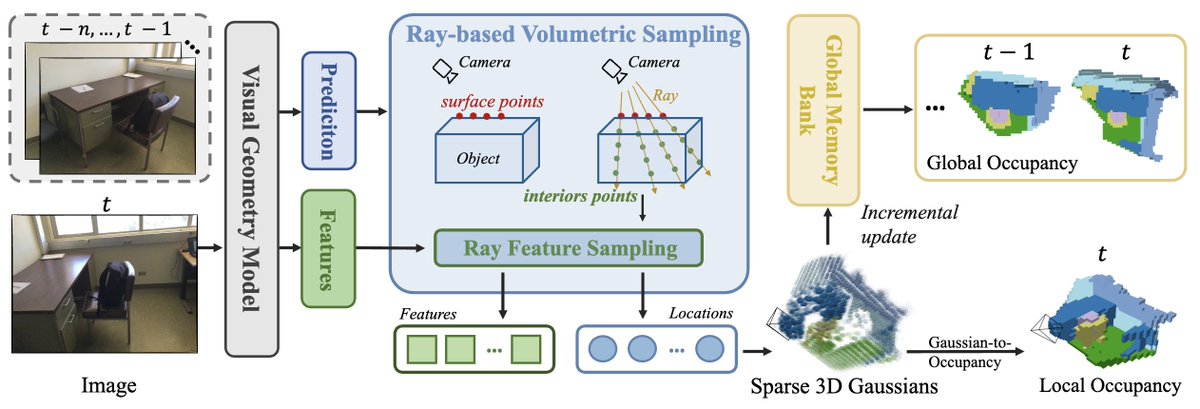
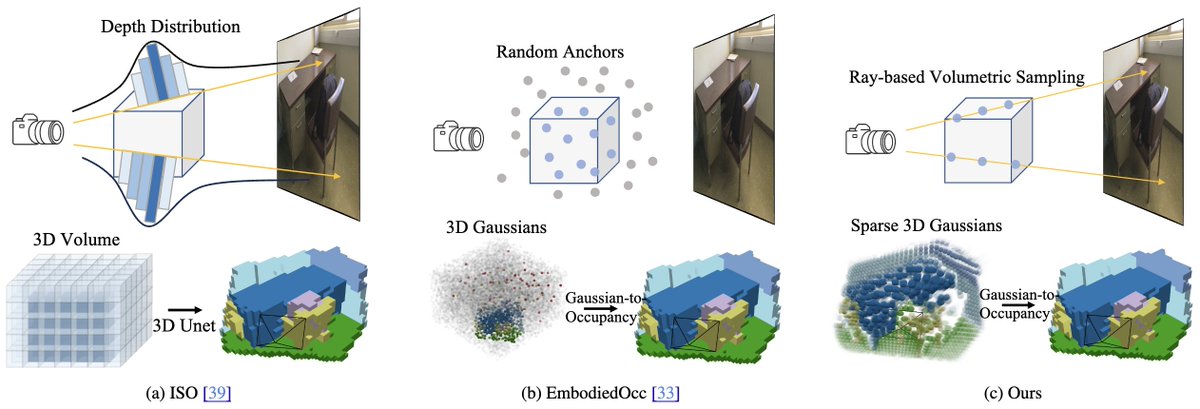
📄 Poster 666: Generalizing Visual Geometry Priors to Sparse Gaussian Occupancy Prediction
🗓️ June 6 | 16:45–18:45
📍 Poster Session 4
arxiv.org/abs/2602.21552
#ComputerVision #SpatialIntelligence
1
1
77
Jun 6
We introduce GPOcc, a novel framework that leverages generalizable Geometry Priors (GPs) for Occupancy prediction with sparse Gaussian rendering.O ur method surpasses the previous state of the art by 9.99 mIoU and 8.24 IoU in the monocular setting, while running at 2.65X FPS.
41
Jun 6
We're excited to present our #CVPR2026 ORAL paper:
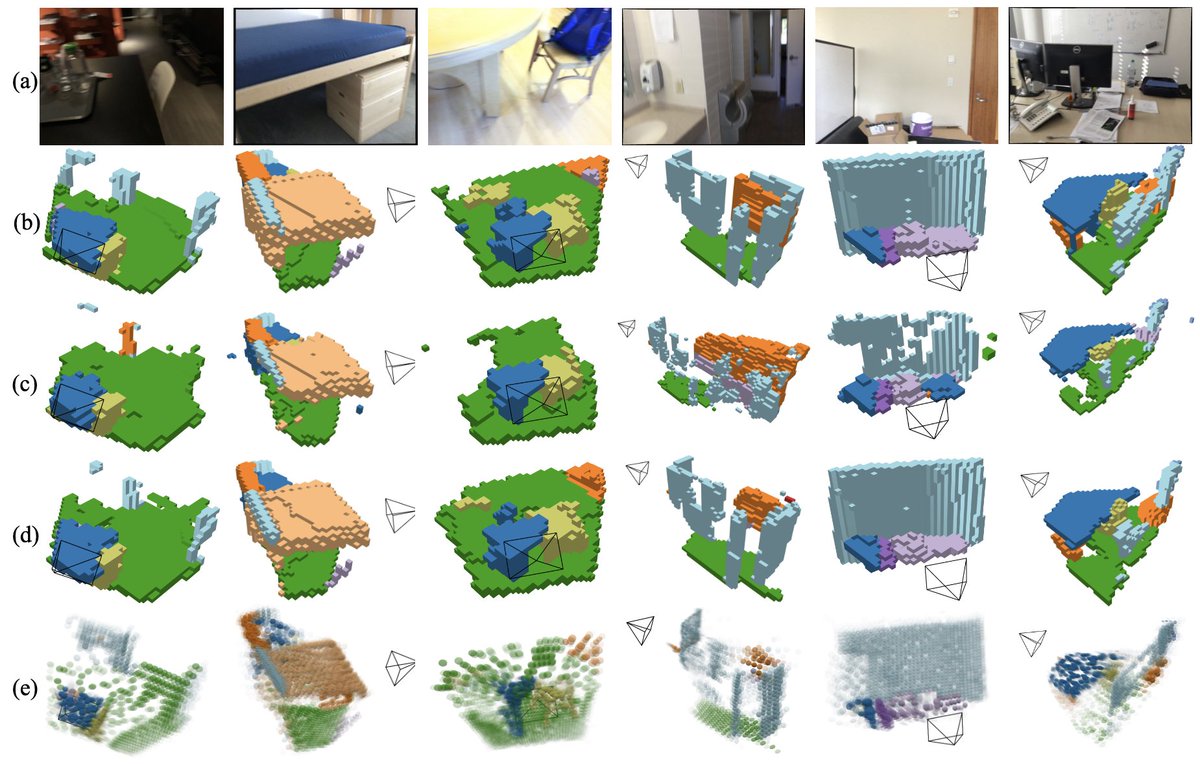
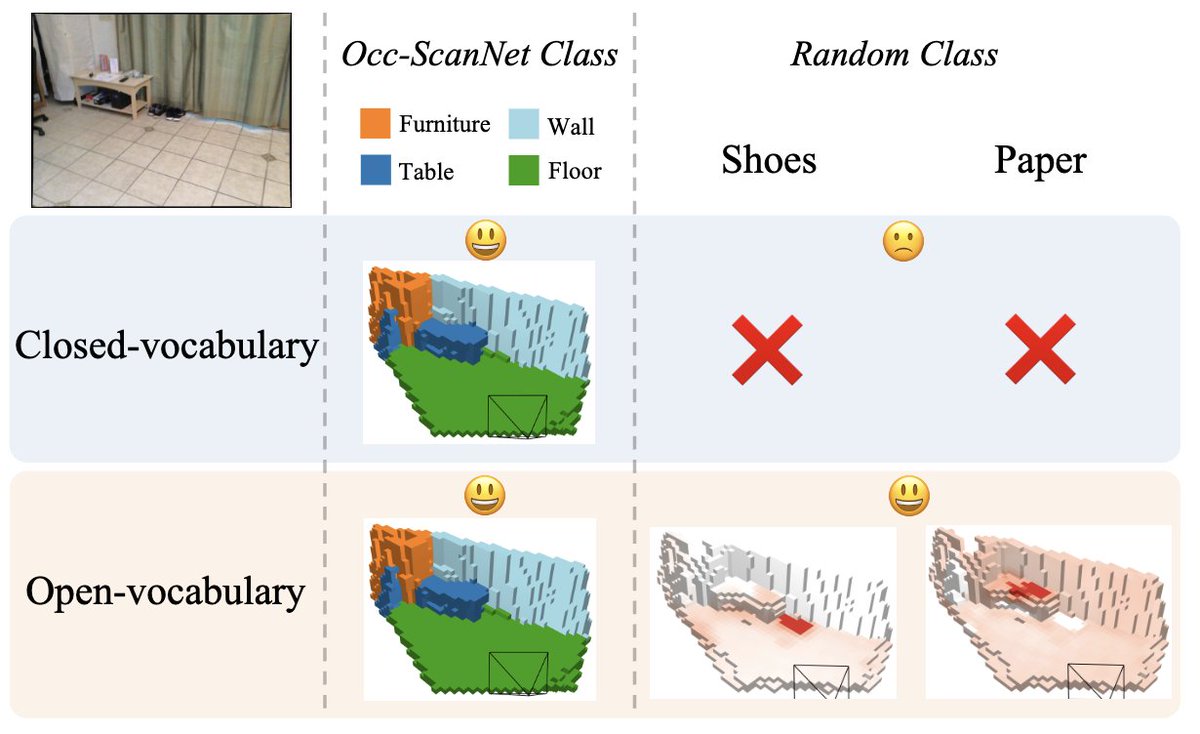
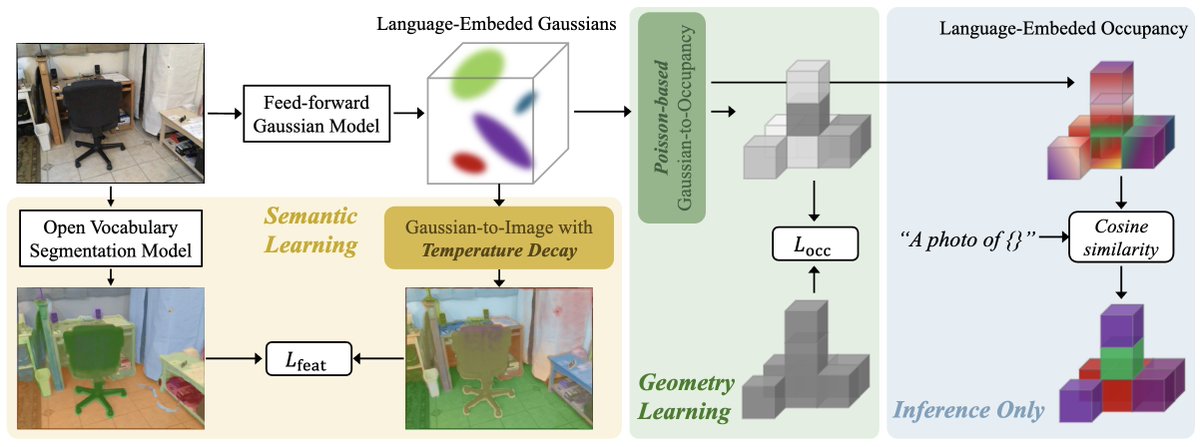
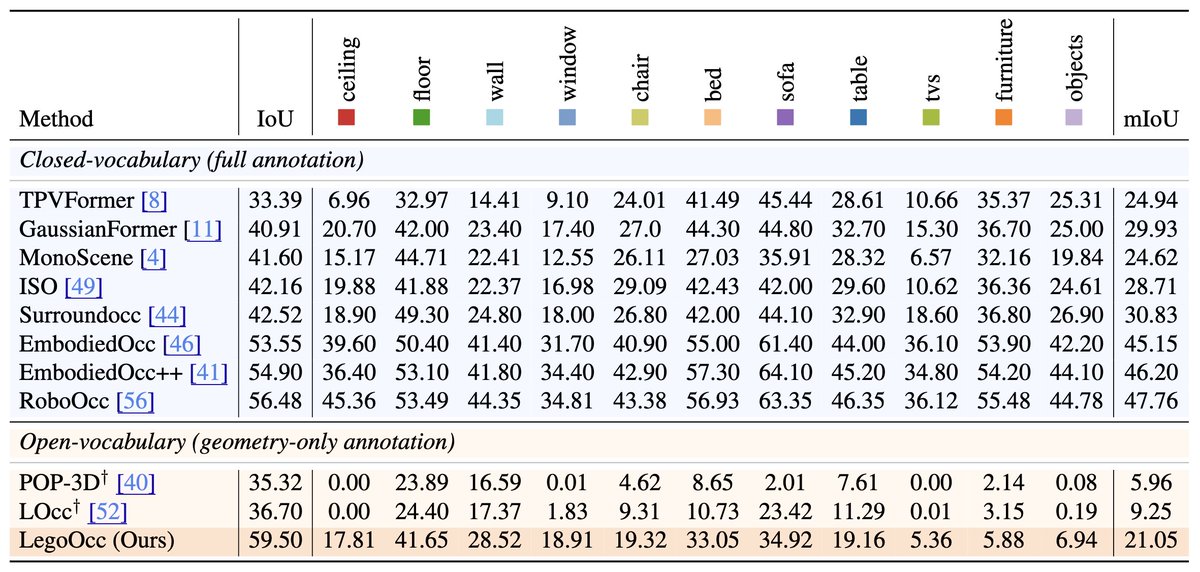
Monocular Open Vocabulary Occupancy Prediction for Indoor Scenes
🗓️ June 6 | 14:00–15:15
📍 Oral Session 4C: Spatial Reasoning
arxiv.org/abs/2602.22667
#SLAM #ComputerVision

1
1
164
Jun 6
We introduce LegoOcc, which leverages Language-embedded Gaussians as a fine-grained 3D spatial intermediate representation for monocular Open-vocabulary Occupancy prediction, enabling embodied agents to reason about arbitrary objects beyond closed taxonomies.
41
May 29
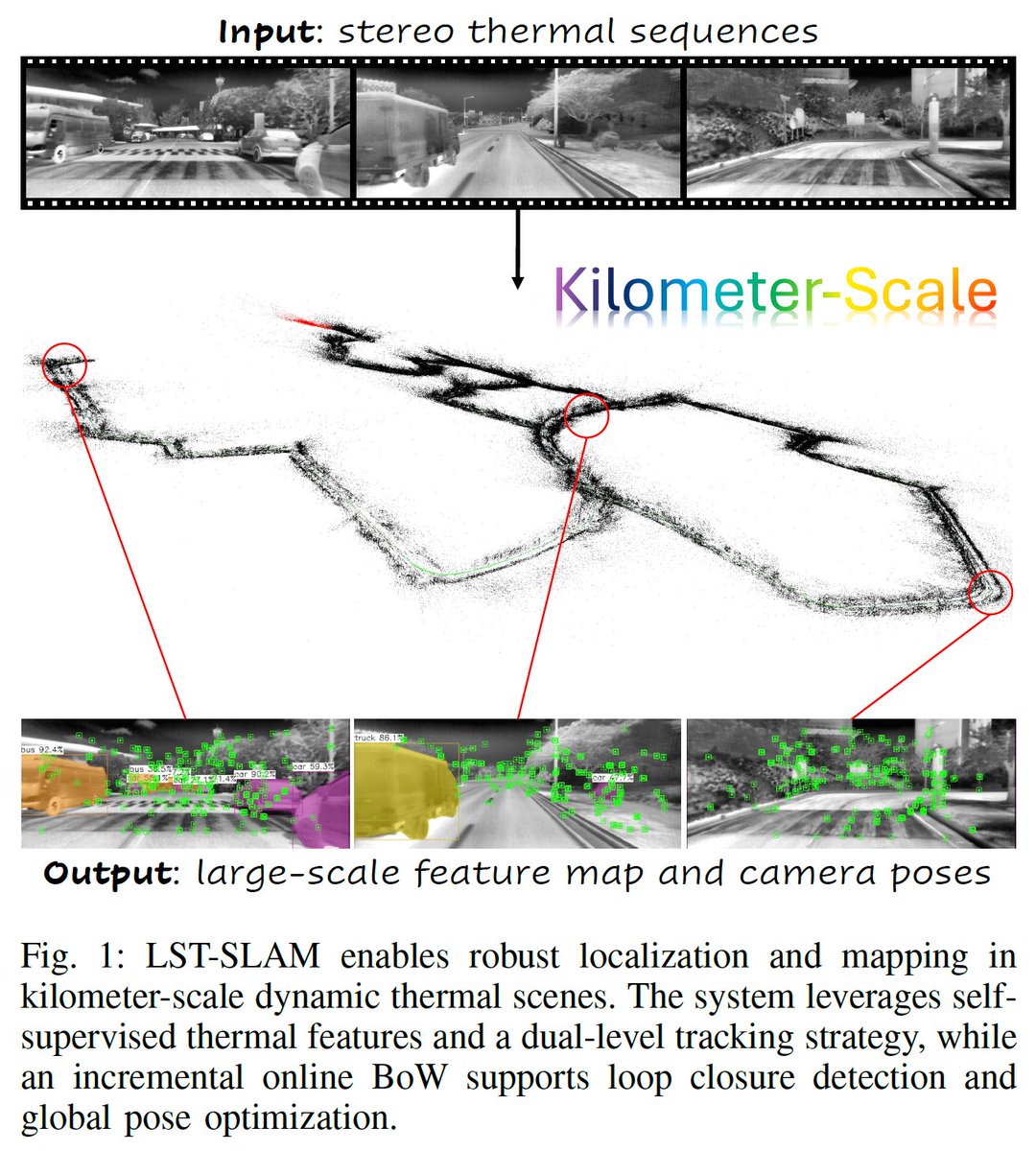
PeakLab@HKUST-GZ will present #ICRA2026 — advancing large‑scale thermal SLAM.
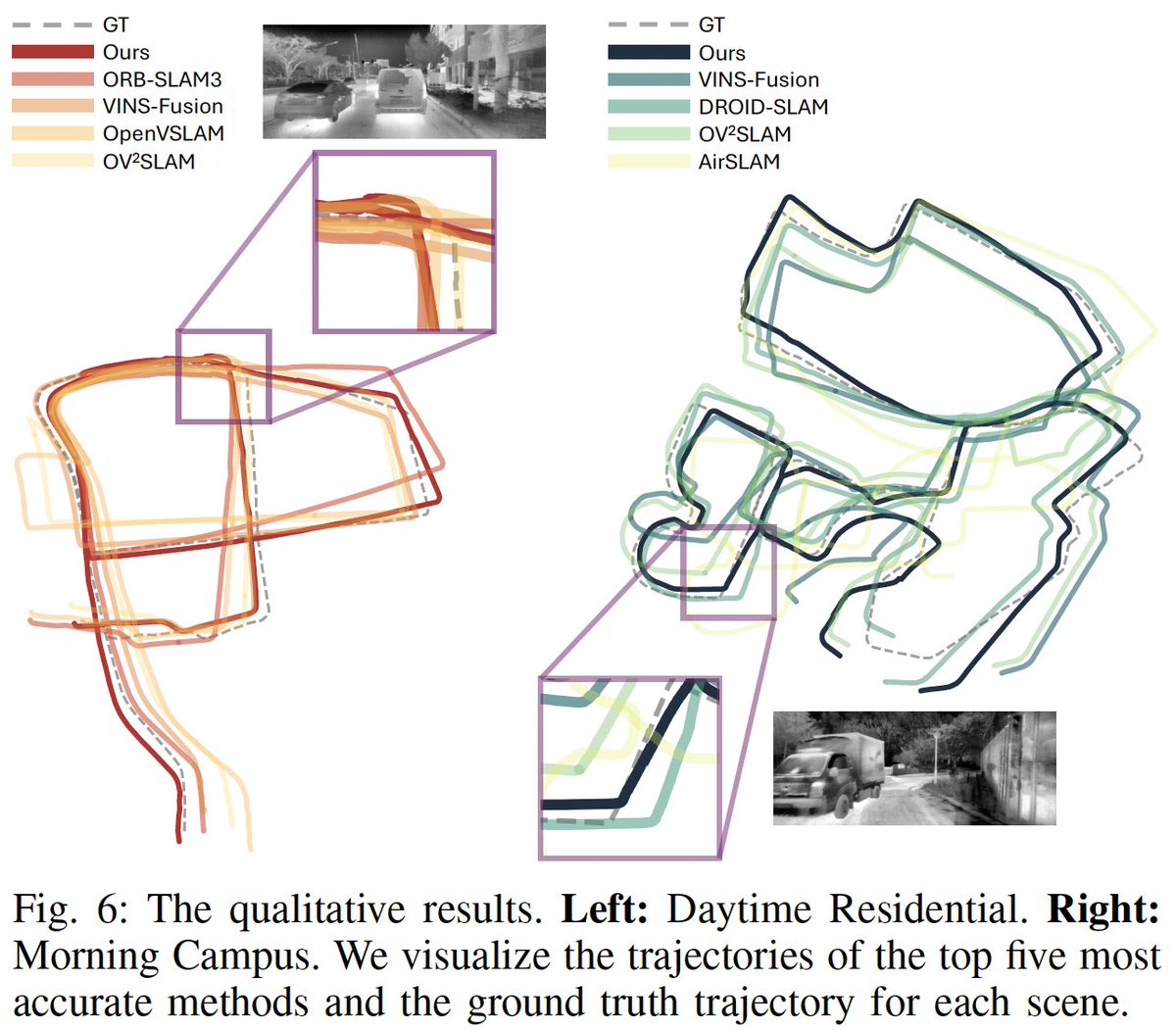
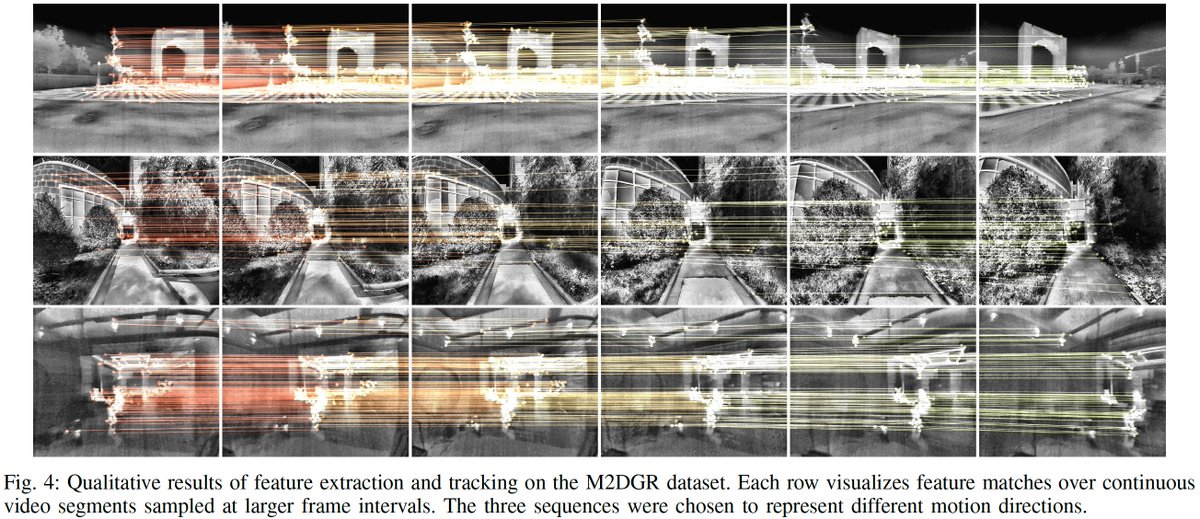
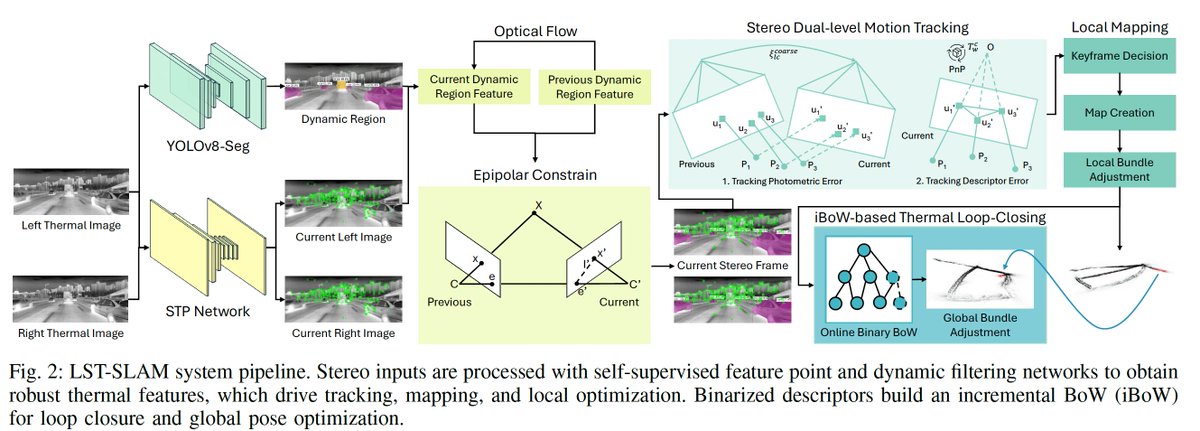
🚨 LST-SLAM: A Stereo Thermal SLAM System for Kilometer‑Scale Dynamic Environments
📅 Wednesday, June 3rd | 15:00–16:30 | WeI2I.81
Stop by and chat with us! 🤖
arxiv.org/abs/2602.20925
#Robotics #SLAM
1
186
May 29
PeakLab@HKUST-GZ will present at #ICRA2026 — advancing safe navigation
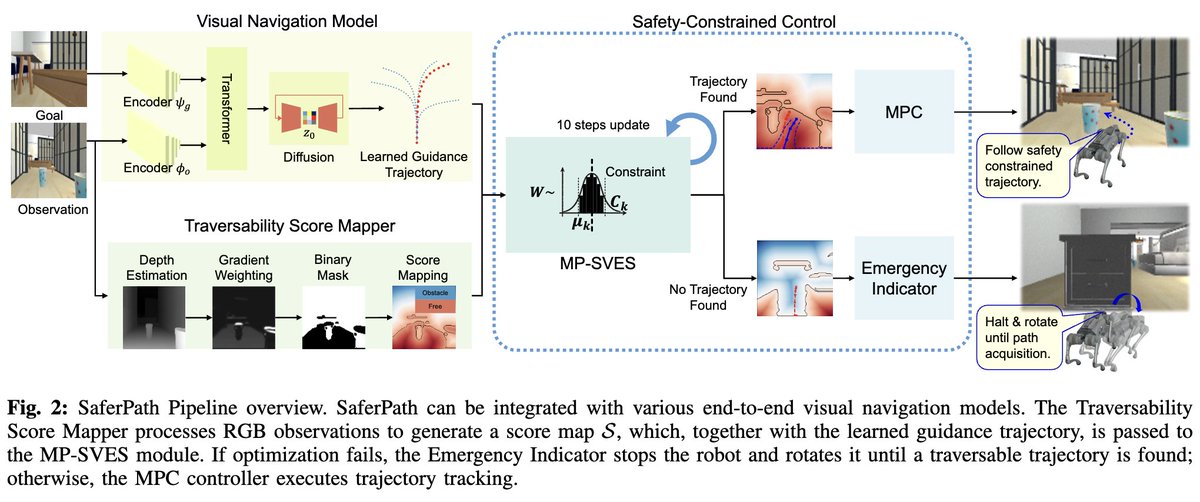
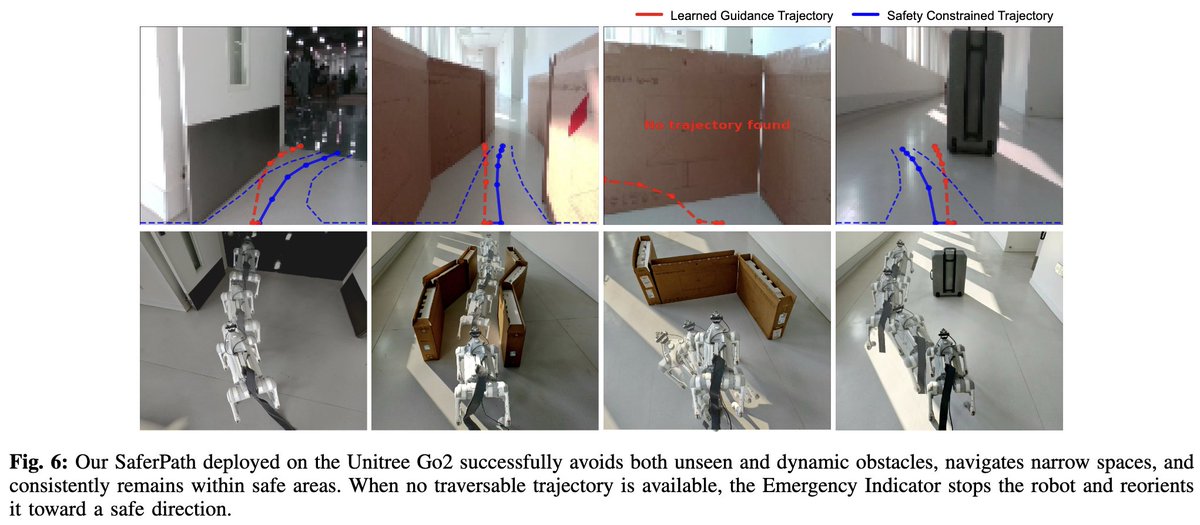
🚀 SaferPath: Hierarchical Visual Navigation with Learned Guidance & Safety‑Constrained Control
📅 Thu June 4, 9:00–10:30 ThI1I.272
Come chat with us if you’re around!
arxiv.org/abs/2603.01898
#Robotics #SLAM

2
185
9 Jul 2020
Excited to be accepted into RSS Pioneer 2020. I will introduce our work on "Learning Methods for Robust Localization" this Saturday (virtually).
This 3-minutes video summarizes my research during my Ph.D. study: youtu.be/RVyifQ5TUpE
#RSS2020 #Robotics
1
3
29 Jun 2020
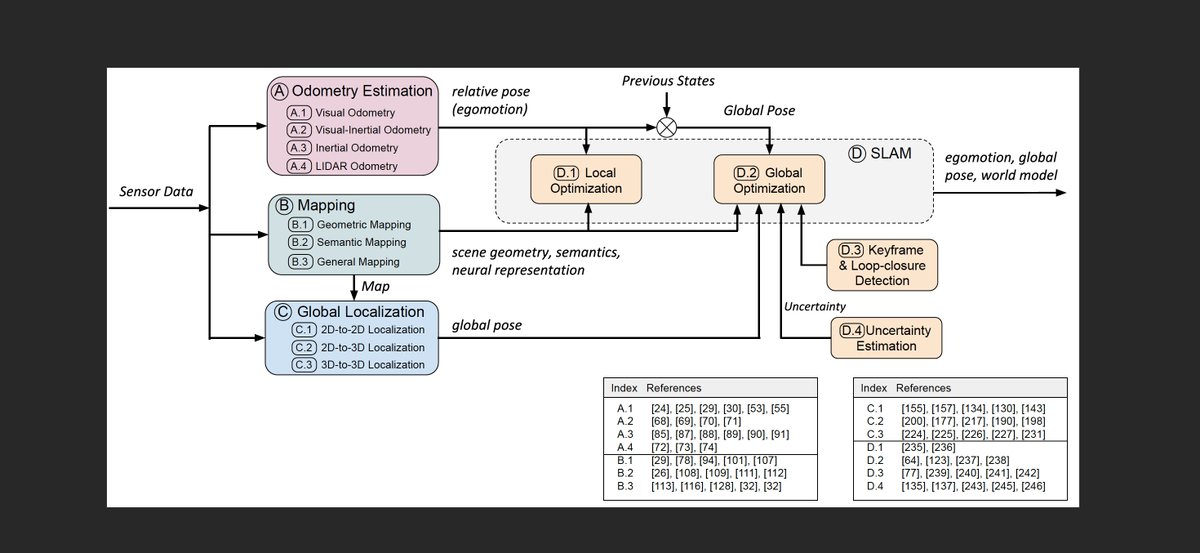
Check our survey paper on "Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence": arxiv.org/abs/2006.12567.
We extensively cover the topics from odometry estimation, mapping, to global localization and SLAM. #Robotics #ComputerVision
3
3
12
29 Jun 2020
We hope our survey can connect emerging works from robotics, computer vision and machine learning communities, and serve as a guide for future researchers to apply deep learning to tackle localization and mapping problems.
Project Website: github.com/changhao-chen/dee…
5
Changhao Chen retweeted

2 Jan 2020
SelectFusion: A Generic Framework to Selectively Learn Multisensory Fusion
deepai.org/publication/selec…
by Changhao Chen et al.
#Estimator #Statistics
7
12
12 Dec 2019
Check our AtLoc, a new AAAI 2020 paper. We provide state-of-the-art results on camera relocalization using only single images.
11 Dec 2019

Paper on Attention Guided Camera Localisation accepted as an Oral at #AAAI2020! Check out the video, youtu.be/_8NQXBadklU, source code, github.com/BingCS/AtLoc, and paper here: arxiv.org/abs/1909.03557. #Robotics #ComputerVision
2
19 Jun 2019
We show how learned sensor fusion strategies can improve accuracy & robustness in deep VIO when dealing with noisy/corrupted data, while adding interpretability.
Selective Sensor Fusion for Visual-Inertial Odometry arxiv.org/abs/1903.01534
Poster 208 Thu 20, 10:00 am #CVPR2019
6
13