
Joined January 2026
- Tweets 17
- Following 13
- Followers 4
- Likes 44
13 Photos and videos











The Hamiltonian system from optimal control can be used to noise-denoise control systems. Gives deterministic alternative to injecting noise through controls for feedback control. Comparison with an elementary model based policy gradient method included.
hackmd.io/@clopenloop/H1yt3T…
1
42
Topological obstructions to smooth global stabilization can be avoided by adding noise.
Also, one can globally converge to minimizer of strongly convex function in domain with non-convex constraints.
Preprint: tinyurl.com/mth23ux4
#controltheory #optimization
4
240
Start with a reference ergodic process, and compose it with a transport map. You get a new process ergodic with respect to the terminal transported measure. An easy way to stabilize systems to a target ergodic objective.
Another alternative: R o T o inv(R)
2
60
Karthik Elamvazhuthi retweeted

May 15
🥇 Congrats to Arthur J. Krener — winner of the IFAC Giorgio Quazza Medal 2023–2026!
For fundamental contributions to nonlinear systems analysis, estimation, control & optimization. 50 years shaping the field.
To be honored at #IFAC2026 in Busan. 📄 buff.ly/E6AmEAn

2
5
506
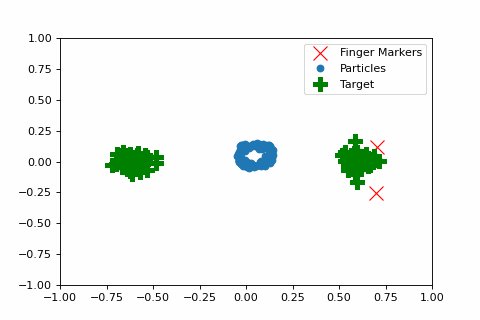
Repulsive leaders have poorer controllability: duh (Limitations of the study: repulsive leaders are four of my fingers.)
Splitting by two charismatic charmers on the other hand.
#SwarmBending #HumanSwarmInteraction
1
50
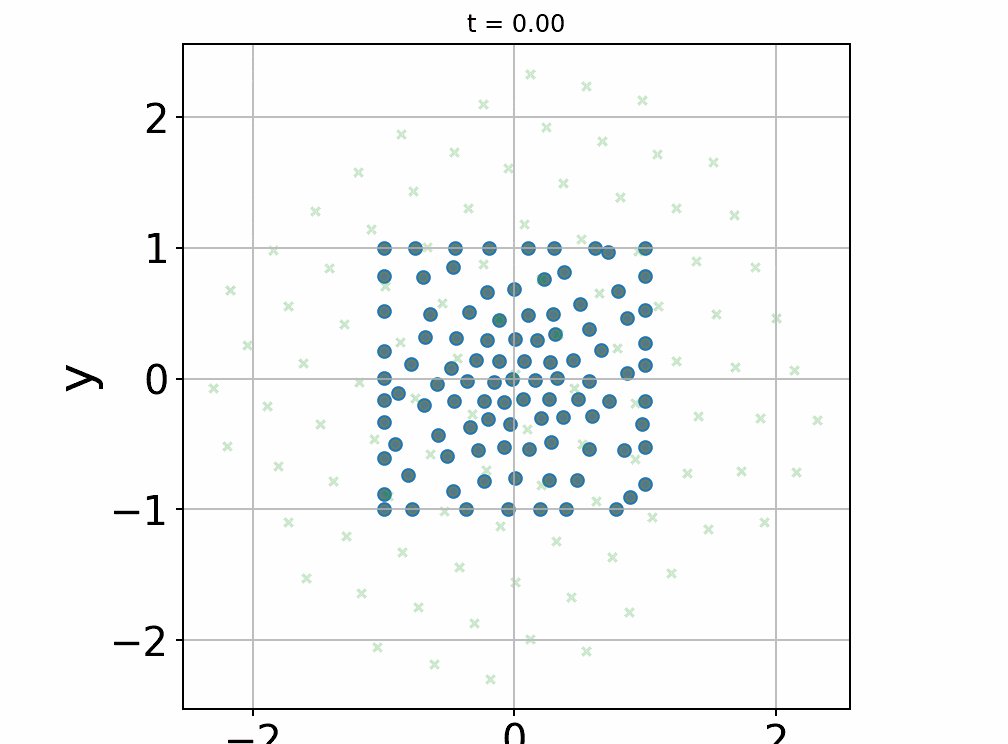
This week, the bees have elevated in their collective decision making dynamics, from Euclidean gradient flows to Wasserstein gradient flows. As higher beings they have to now confront a more complex equilibria landscape.
hackmd.io/@clopenloop/rkftIi…
1
59
Before I get into the heart of the presentation, I would like to thank my two amazingly talented students who lead all of this work, ChatGPT browser tab 2 and Claude browser tab 3.
#fundingcuts #academia
1
65
Round 2 of collective decision making as a feedback control problem. This time we visit the Seeley model. How do bees avoid deadlock and obstructions to stabilization? Do control engineers need to practice headbutting?
hackmd.io/yTBuClZ0Sh65PzJNGB…
#controltheory
71
Latest blog post of clopenloop is coincidentally on how the generative modeling method of flow matching can be used to go from open loop trajectories to closed loop based feedback synthesis.
Link: hackmd.io/@clopenloop/HkVqN0…
#controltheory #flowmatching #machinelearning
58
New lecture in a series on Generative Modeling for Control problems. We see how denoising diffusion based feedback control specializes to control affine systems with drift.
Link: hackmd.io/kjV3PiI4ROOPb_55YY…
#diffusionmodels #controltheory
1
110
New lecture in a series on Generative Modeling for Control problems. We see how denoising diffusion based feedback control specializes to Linear Time Invariant Systems (LTIs).
Link: tinyurl.com/bde872ez
For other lectures: sites.google.com/view/karthi…
#controltheory #diffusion
1
147
Link to my zoom talk at the GERAD Research Center, "A Transport Theoretic Perspective for Nonlinear Control":
youtube.com/watch?v=cXy1mjJz…
Thanks to the organizers, Aditya Mahajan, Peter Caines, and Shuang Gao for the nice interactive session.
#Controltheory
104
New lecture in a series on Generative Modeling for Control problems. I introduce a control version of gradient descent: The nonholonomic gradient descent.
hackmd.io/pTtk6ohHSBSfqLVsNU…
For other lectures: sites.google.com/view/karthi…
#Controltheory #generativemodeling
2
117
Encoding geometry in neural network architectures has wide applications, from robots' configuration spaces to safety. With @RishiSonthalia, we present and compare differential geometric and variational ways to enforce constraints by design.
Preprint: tinyurl.com/38zkkars
1
84
New paper on sampling from the reachable set.
Traditional random sampling approaches perform very poorly in reachable set estimation even in low dimensions. Our method addresses this using OT: ieeexplore.ieee.org/document…
#Controltheory #OptimalTransport
33