
Dynamic Agile Production Robots That Learn and Optimize Knowledge and Operations
Joined January 2021
- Tweets 35
- Following 16
- Followers 57
- Likes 15
15 Photos and videos








10 Dec 2023
Hi! We will be moving from X to LinkedIn. Please follow us there instead: linkedin.com/in/darko-eu-pro…. This account will not be updated anymore.
1
78
2 Oct 2023
A way to make robots navigate more smoothly around people, by taking into account multimodal human predictions in a better way (MoAT3.4) @_lukasheuer
1
76
2 Oct 2023
And later today: a data-efficient and explainable method for very long term human motion prediction -- upwards of a minute (MoBT18.7)
71
DARKO project retweeted

15 Apr 2022
Just a few weeks away from #ICRA2022! During it, we will have our 4th Workshop on Long-term Human Motion Prediction! The hybrid event will feature a set of interesting talks from different communities. Looking forward to meeting you all there! More info at
motionpredictionicra2022.git…
1
3
16 May 2022
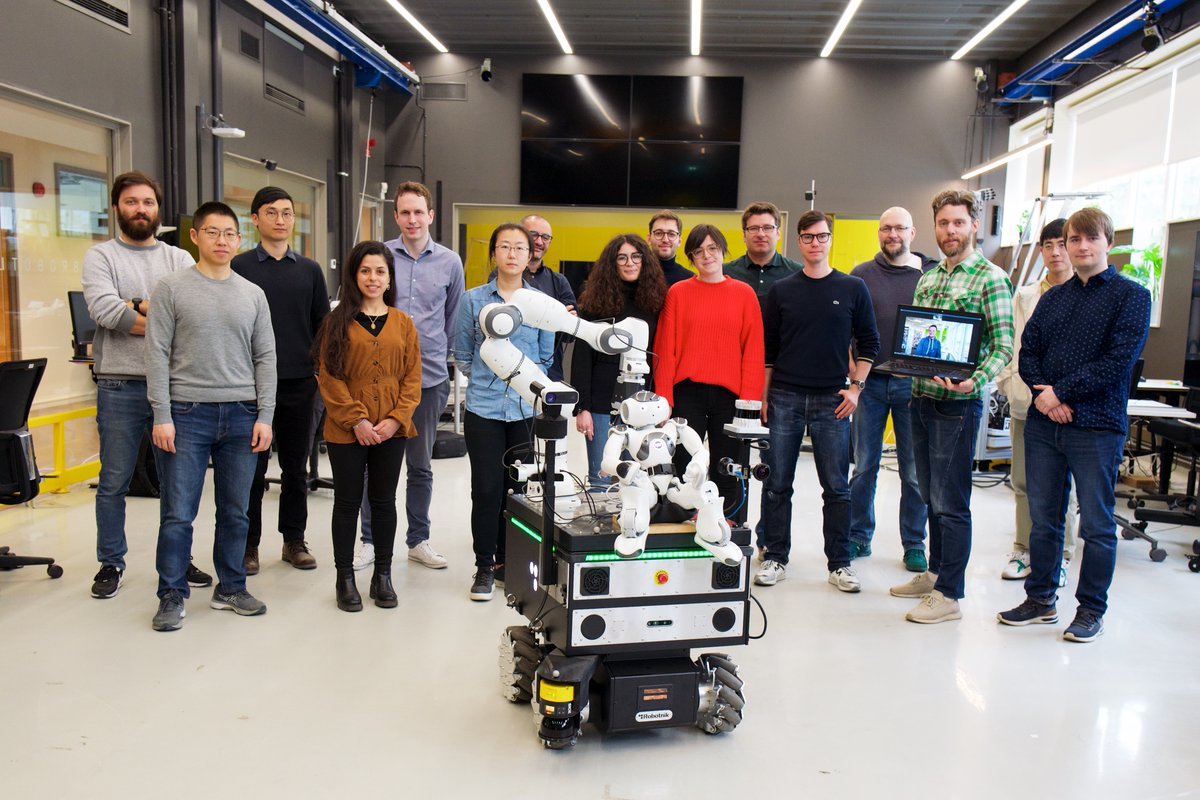
The first DARKO robot has arrived at @orebrouni, just in time for our integration sprint. It was great fun to have all the partners get together to boost the integration of all components on the robot and in simulation! darko-project.eu/gallery/


3
3

New Job Opportunity in L-CAS: Lecturer / Senior Lecturer (tenured) in Robotics and Autonomous Systems lcas.lincoln.ac.uk/wp/new-jo…
7
5
22 Feb 2022
#knowingtheteam Stefano Angeli, from @CPiaggioUniPisa developmens and designs gripping #tools capable of throwing objects itself beyond the working area of the #robot,thus making the #logistic process more efficient, as well as in the #development of optimal control strategies
21 Feb 2022
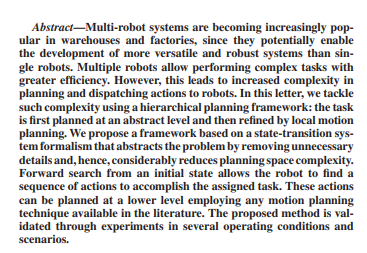
Read our latest paper "High-Level Planning for Object Manipulation With
Multi Heterogeneous Robots in Shared Environments", writte by: Alessandro Palleschi, Mathew Jose Pollayil and Lucia Pallottino: ieeexplore.ieee.org/document…
@CPiaggioUniPisa
1
2
14 Feb 2022
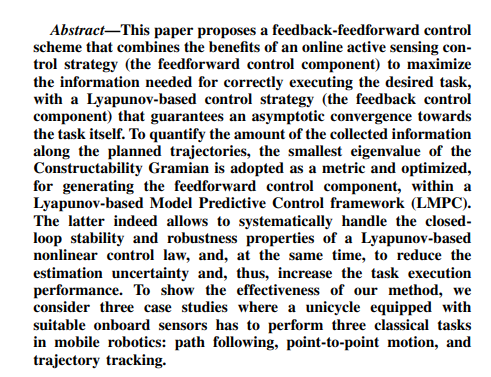
Our article,"Information-aware Lyapunov-based MPC in a
feedback-feedforward control strategy for
autonomous robots" has been accepted! Here's the link:
ieeexplore.ieee.org/document…
1
8 Feb 2022
#knowingtheresearchers
Giorgio Grioli phd is the new entry into the Darko Project! He will go into the planning and control of mobile robots in the risk space in dark stores.
Welcome on board!
3
2 Feb 2022
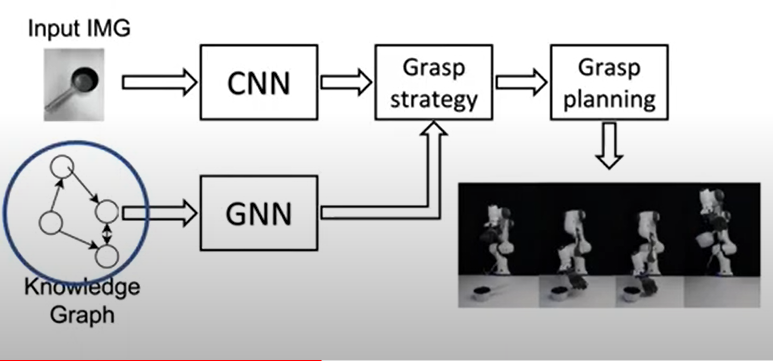
Our new article, Learning With Few Examples the Semantic Description of Novel Human-Inspired Grasp Strategies From RGB Data, has been accepted! Follow the link: ieeexplore.ieee.org/document…
And watch the video: youtube.com/watch?v=Tvl_5ni2…
@DII_Pisa
@CPiaggioUniPisa
@Unipisa
@PoliTOnews

1
2
2 Feb 2022
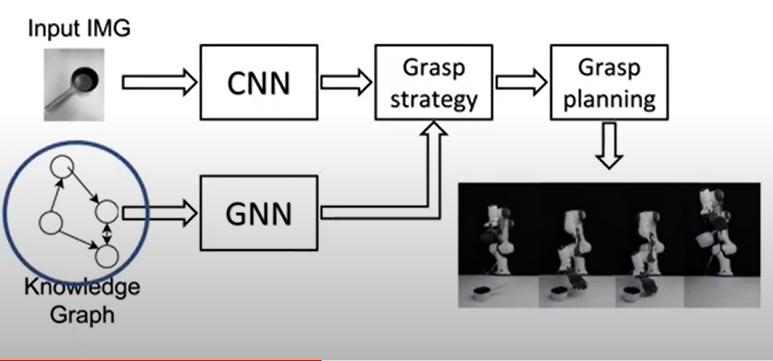
Our new article, Learning With Few Examples the Semantic Description of Novel Human-Inspired Grasp Strategies From RGB Data, has been accepted! Follow the link: ieeexplore.ieee.org/document…
And watch the video: youtube.com/watch?v=Tvl_5ni2…
@DII_Pisa @Unipisa
@PoliTOnews

1
2
19 Jan 2022
Science fiction or science fact? In DARKO we develop object-throwing robots with people skills.
bosch.com/stories/darko-obje…
4
5
23 Dec 2021
Anticipating human motion is a key skill for intelligent systems that share a space or interact with humans. To learn more, join the DARKO-supported workshop on Long-term Human Motion Prediction at ICRA 2022 conference.
2
7
8 Dec 2021
Coming up: stakeholder workshop with @eu_trinity to discuss cross-usecase challenges and requirements in agile production
1
4
3 Dec 2021
Selecting challenging items from a spare parts warehouse to develop novel perception, grasping and manipulation skills in DARKO!
3
27 Oct 2021
Reporting from today's euRobotics topic group summit. Prioritised roadmapping topics include much of DARKO's objectives, like reliable perception, manipulation, long-term operation, safety & certification, facilitating deployment.
1