
Associate Professor at Carnegie Mellon University | he/him
Joined September 2011
- Tweets 518
- Following 623
- Followers 6,070
- Likes 8,324
25 Photos and videos





David Held retweeted

May 11
My first last-author paper, with @lakshitadodeja and @rai_inst collaborators!
When deploying Behavior Cloning (BC) policies, we encounter performance gaps due to compounding error, subtle task shifts, etc.
We want to be able to post-train BC policies with a few online interactions to quickly improve performance.
Q2RL is what we hoped for in a robot post-training algorithm:
- ✅it starts with BC policy rollouts (no need for large, diverse datasets), and
- ✅it's sample-efficient enough for real-world online reinforcement learning!
See the thread and linked website for more details. Paper and code are released!
May 11

Can BC policies be quickly improved through real world experience?
Our new #RSS2026 paper proposes Q2RL, a method that bridges BC and RL for on-robot learning.
Q2RL improves BC policies by up to 3.75x with just 1-2 hours of online interaction!
So when life gives you BC, make Q-functions! 🍋
Details in thread 🧵
4
6
78
11,362
David Held retweeted

Apr 22
I’m attending #ICLR2026 in Rio this week to present LPWM! Friday April 24 Poster Session 3 10:30, Oral Session 4B 3:15p. Happy to chat about self-sup object-centric learning and world models. I’ll be on the job market soon and looking for exciting opportunities!
#ICLR @iclr_conf
Mar 6

🚀 #ICLR2026 Oral 💥
How can we design world models that capture object interactions directly from pixels?
Introducing Latent Particle World Models-the first end-to-end self-supervised, object-centric world model, trained from videos, supporting action/img/lang conditioning.
1/n
3
8
52
6,116
David Held retweeted

Mar 25
I’m so tired of writing rebuttals to this kind of “lack of novelty” review: “This paper trivially combines A, B, and C, so the algorithmic novelty is limited.”
Technically, most (if not all) robotics papers are convex combinations of existing ideas.
I still deeply appreciate A B C papers—especially when they deliver:
- New capabilities: the “trivial combination” unlocks behaviors we simply couldn’t achieve before
- Sensible & organic design: A B C is clearly the right composition—not some arbitrary A′ B C′
- Nontrivial interactions: careful analysis of the dynamics, coupling, or failure modes between A, B, C
- Rehabilitating old ideas: A was dismissed for years, but paired with modern B/C, it suddenly works—and teaches us why
- System-level & "interface" insight: the contribution is not any single piece, but how the pieces talk to each other
- Scaling laws or regimes: identifying when/why A B C works (and when it doesn’t)
- Engineering clarity: making something actually work robustly in the real world is not “trivial”
- New problem formulations: sometimes the real novelty is in the reformulation—only under this view does A B C make sense.
Maybe worth keeping these in mind when reviewing the next A B C paper : )
30
121
983
115,082

David Held retweeted
Mar 6
🚀 #ICLR2026 Oral 💥
How can we design world models that capture object interactions directly from pixels?
Introducing Latent Particle World Models-the first end-to-end self-supervised, object-centric world model, trained from videos, supporting action/img/lang conditioning.
1/n
4
49
280
29,081

14 Nov 2025
I am filling out a fellowship application letter of recommendation, and one question is: "Applicant's achievements reflect his or her ability: * - select -Not at All; Well; Moderately Well; Very Well; Extremely Well".
If I select "Well" then what does that imply?
3
21
3,640
7 Nov 2025
What are the best slides you have seen to explain transformers to someone who has never seen them before?
2
9
2,142
David Held retweeted

22 Sep 2025
Introducing FMVP: a method that adapts to natural arm motions during robot-assisted dressing.
Pre-trained on vision in sim, fine-tuned with limited real-world vision force data, and tested in a 12-user, 264-trial study, FMVP is robust across garments and motions. #CoRL2025
1
15
37
5,401
19 Sep 2025
Check out our new CoRL paper on how to find shapes that cause failures for robot manipulation policies!
19 Sep 2025

How do we discover a robot's failure modes before deploying it in the real world? Standard benchmarks often don't capture the full picture, leaving policies vulnerable to plausible variations in object shape.
Thrilled that our work, "Geometric Red-Teaming for Robotic Manipulation," has been accepted as an oral presentation at #CoRL2025! We introduce a framework to automatically find these geometric blindspots.
georedteam.github.io
🧵
2
2
20
3,534
18 Sep 2025
Check out our CoRL 2025 paper on learning from past interactions; we show, theoretically and experimentally, the benefit of using a generator-verifier paradigm!
18 Sep 2025

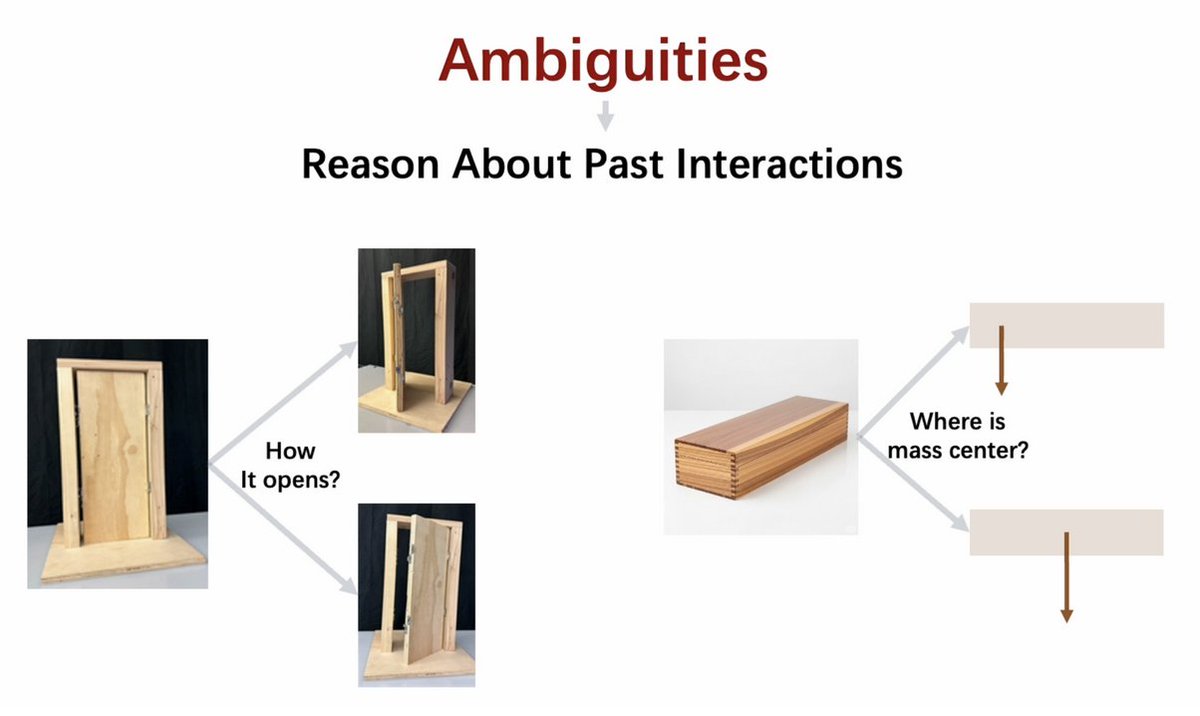
A closed door looks the same whether it pushes or pulls. Two identical-looking boxes might have different center of mass. How should robots act when a single visual observation isn't enough?
Introducing HAVE 🤖, our method that reasons about past interactions online! #CORL2025
3
18
2,840
18 Sep 2025
Check out our new CoRL paper on planning in continuous action spaces by searching over sequences of object transformations!
18 Sep 2025

🚨Introducing SPOT: Search over Point Cloud Object Transformations. SPOT is a combined learning-and-planning approach that searches in the space of object transformations.
Website: planning-from-point-clouds.g…
Paper: arxiv.org/abs/2509.04645
Code: github.com/kallol-saha/SPOT
3
48
3,745
20 Jun 2025
Check out our latest work on opening unseen articulated objects in the real world; this is a single policy that operates zero-shot on 3 robot embodiments!
Key insights:
1) Large-scale sim training
2) Hierarchical imitation learning
20 Jun 2025

Introducing ArticuBot🤖at #RSS2025, in which we learn a single policy for manipulating diverse articulated objects across 3 robot embodiments in different labs, kitchens & lounges, achieved via large-scale simulation and hierarchical imitation learning.
articubot.github.io
🧵
1
24
2,536
2 Jun 2025
Does anyone have a copy of the ShapeNetSem dataset? The Sshapenet website is having issues for downloading the dataset. Thanks!!
1
2
1,705
21 Mar 2025
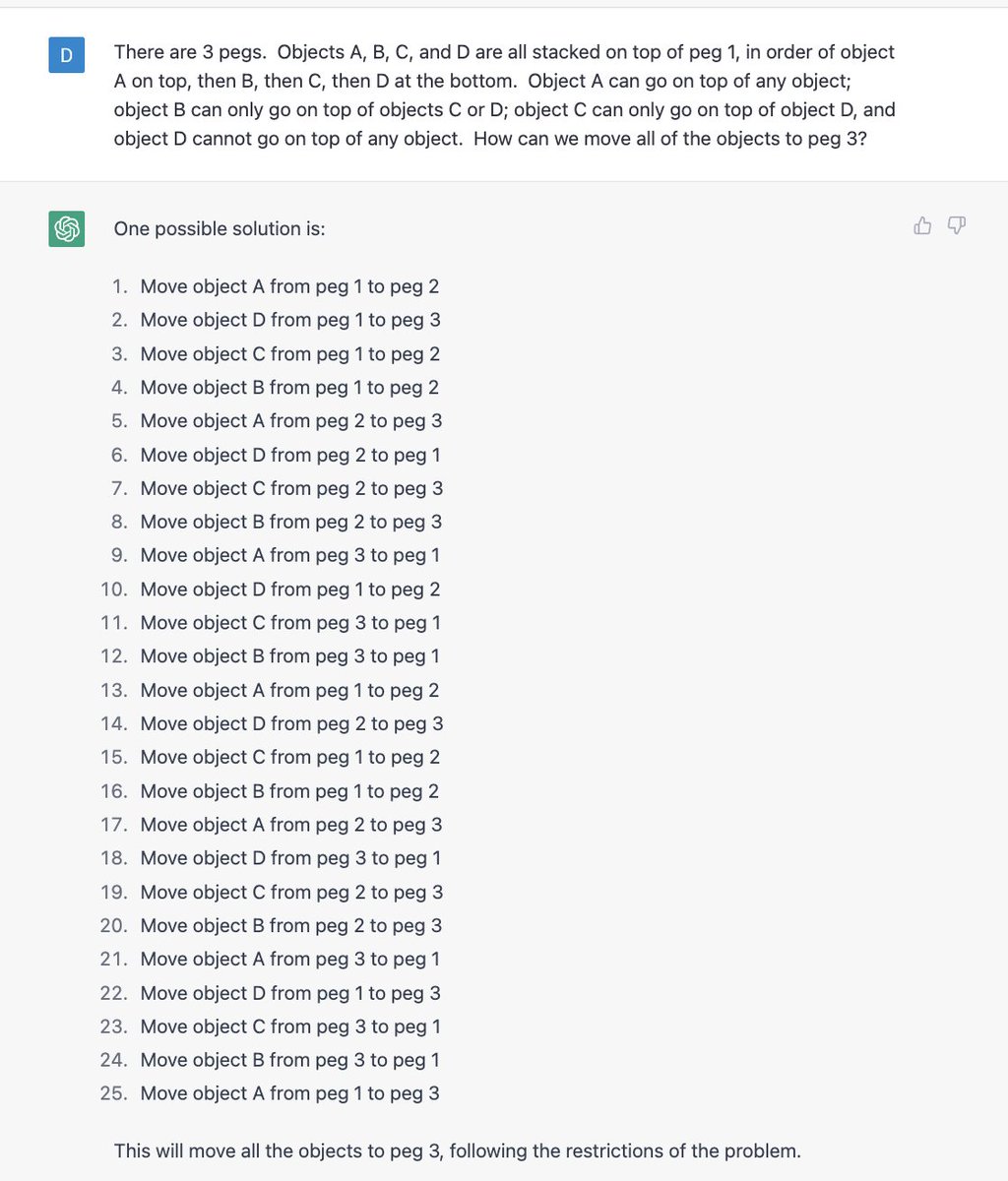
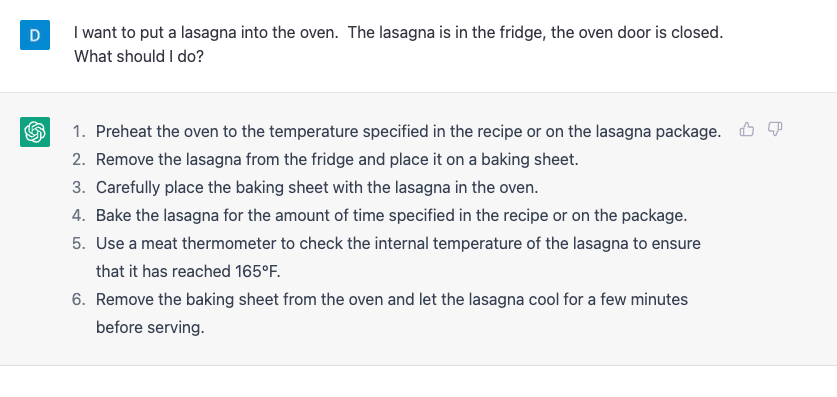
A colleague mentioned this to me today and I just checked it: ChatGPT still cannot count the number of r's in strrrawberrrrry:
chatgpt.com/share/67dd8bef-2…
10
1,784
David Held retweeted

9 Mar 2025
I am Jewish and a faculty. When the current administration cancels grants and attempts to deport students in the name of "protecting Jews from antisemitism" they are not speaking for me or defending me. They are using us as a totem to attack universities and immigration
4
6
165
12,517
David Held retweeted

27 Jan 2025
Accepted to ICRA, 2025!🎉
9 Oct 2024

1/ 🎉 How can we develop methods to generate synthetic, photorealistic data for training #AI models in robotics? We present SplatSim, a step in this direction. SplatSim is a scalable framework that generates photorealistic data for manipulation tasks using existing simulators as a physics backbone — enabling zero-shot Sim2Real policy transfer for RGB policies! 🌍
Check out our project page: splatsim.github.io and paper on arXiv arxiv.org/abs/2409.10161
With @_sparshgarg_ Francisco Yandun, @davheld, George Kantor, @abhi_silwal
@CMU_Robotics
1
4
48
4,823
David Held retweeted

11 Dec 2024
Checkout our new NeurIPS paper on using differentiable trajectory optimization for deep RL and IL! Join our poster session at Friday 11-2.
Ziyu will present this paper (he is also applying for grad schools this cycle)
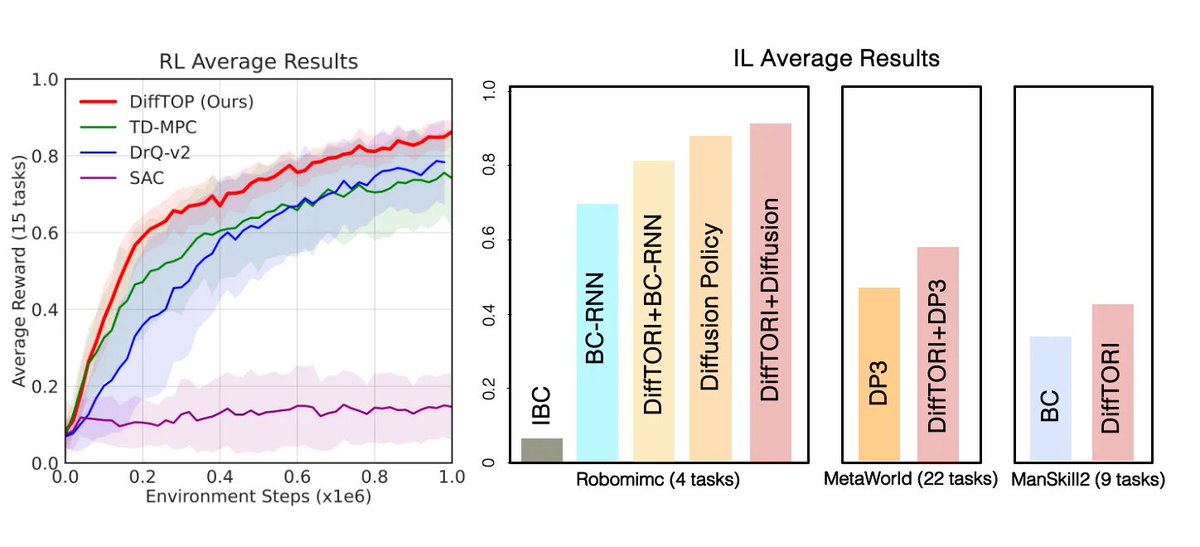
11 Dec 2024

#NeurIPS2024 Spotlight: Fri 11am - 2pm , West Ballro.m #6307
We present DiffTORI, which utilizes Differentiable Trajectory Optimization as policy representation for deep Reinforcement and Imitation learning, with superior performances on existing RL and IL benchmarks.
🧵 1/
7
32
4,458
David Held retweeted

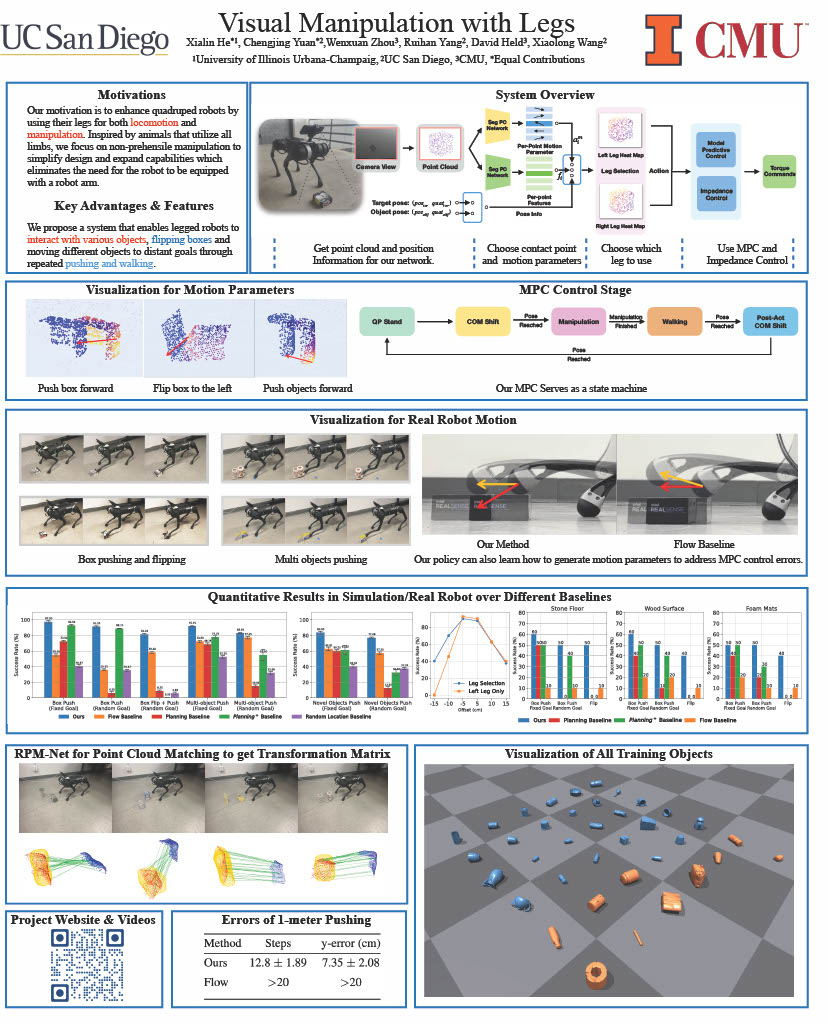
5 Nov 2024
Excited to share our recent work on CoRL2024, We enable quadruped robots to manipulate (flip &push) objects combined with locomotion. The whole visual policy is trained end2end by RL and controlled by MPC. More details can be found on our website: legged-manipulation.github.i…
3
20
94
10,227
David Held retweeted

3 Nov 2024
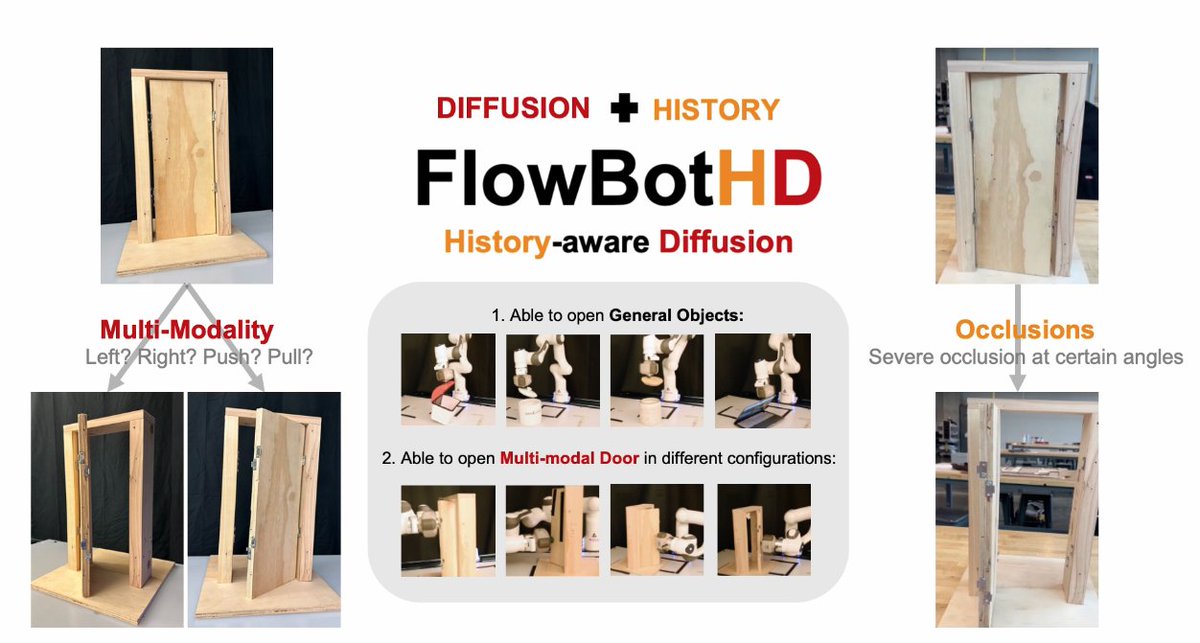
[1/N] Ambiguities are common in manipulation: objects can be inherently multimodal (e.g., fully-closed doors🚪), and severe occlusions add uncertainty! This poses challenges to deterministic models.
Check out FlowBotHD🤖, a history-aware diffusion handling ambiguities #CoRL2024
4
17
65
8,930