
Mar 5
PERSIST is a world model that ditches pixel-based histories for a 3D world state. Instead of searching through an ever-growing sequence of past pixel observations, PERSIST retrieves spatial information from a dynamically evolving 3D representation.
This change improves the spatial memory, 3D consistency, and long-horizon stability of the model, enabling interactive experiences within coherent and evolving 3D worlds.
#MachineLearning #WorldModels #GenerativeAI #3DComputerVision #ComputerVision #Genie3 #AI
13
46
416
26,219

18 Oct 2025
Visualizing 3D point clouds and meshes is often trickier than building the models themselves—missing context, occlusions, and artifacts can hide issues in shape analysis. Careful visualization is as important as any experiment. 🎨🔬 #3DComputerVision #ItzikThoughtLoop
2
133

16 Apr 2025
At the #ELLISProgram 3D Vision & Graphics Workshop, researchers debated the rise of generative models vs. the enduring value of explicit 3D representations.
From Gaussian Splatting to feedforward 3D prediction—see the insights. bit.ly/3EpHxKr
#3DComputerVision #Graphics
4
671

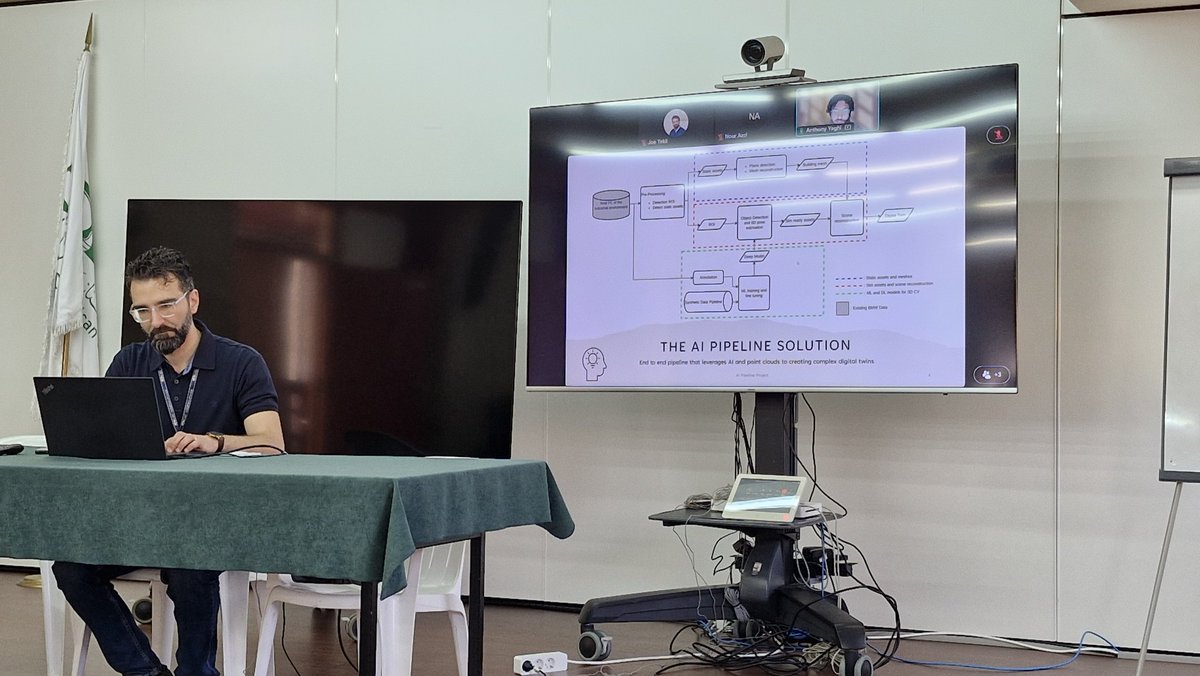
9 Apr 2025
Dr. Anthony Yaghi, student and engineer, explores how #AI and #3Dcomputervision are shaping the digital factories of the future.
1
107

3 Feb 2025
📢 AirSLAM: An Efficient and Illumination-Robust Point-Line Visual SLAM System 📽️
AirSLAM introduces a hybrid visual SLAM approach that integrates deep learning for feature detection with traditional backend optimization.Key highlights:
✅ Unified Feature Extraction: Employs a convolutional neural network (CNN) to simultaneously extract keypoints and structural lines, enhancing feature richness.
✅ Coupled Feature Optimization: Associates, matches, triangulates, and optimizes point and line features in a unified framework, improving pose estimation accuracy.
✅ Lightweight Relocalization Pipeline: Introduces an efficient relocalization method that reuses the built map, utilizing keypoints, lines, and a structure graph to match query frames, ensuring robustness against long-term illumination changes.
✅ Real-Time Performance: Achieves processing rates of 73Hz on PCs and 40Hz on embedded platforms by deploying and accelerating feature detection and matching networks using C and NVIDIA TensorRT.
✅ Superior Performance: Demonstrates outperformance over state-of-the-art visual SLAM systems in illumination-challenging environments through extensive experiments.
---
Paper: arxiv.org/abs/2408.03520
Project Page: xukuanhit.github.io/airslam/
Github: github.com/sair-lab/AirSLAM-…
----
Related articles from LearnOpenCV:
Visual SLAM for Robotics Perception - learnopencv.com/monocular-sl…
LiDAR SLAM - learnopencv.com/lidar-slam-w…
#AirSLAM #RoboticsPerception #Robotics #3DComputerVision #SLAM
9
87
4,151
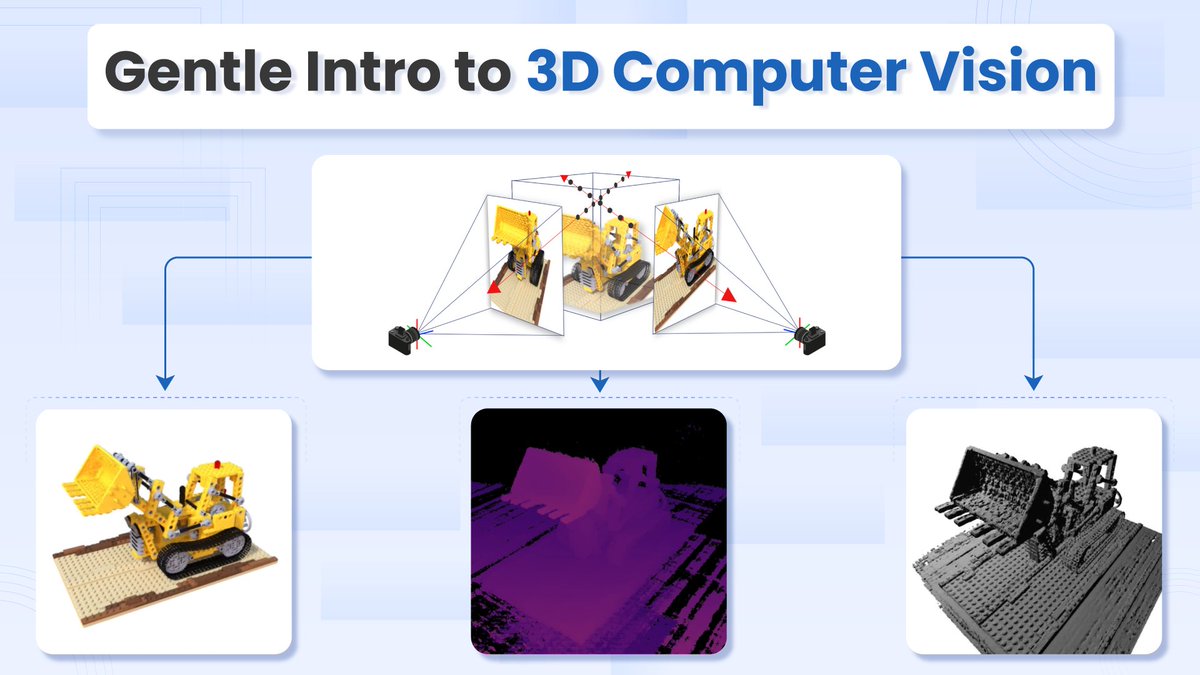
9 Jan 2025
Dive into the world of 3D Computer Vision! 🌐✨ Unlike traditional 2D systems that see flat images, 3D vision lets machines perceive depth and spatial relationships, just like humans. This technology is revolutionizing tasks that require precise spatial awareness.
Imagine robots in a warehouse navigating obstacles and handling items with incredible accuracy - 3D Computer Vision makes it all possible!
Explore how this advanced tech is shaping the future of AI.
Click the link below to read the article: opencv.org/blog/introduction…
Explore our following Free Courses to dive into the world of Computer Vision
🔸Free OpenCV Bootcamp: opencv.org/university/free-o…
🔸Free TensorFlow Bootcamp: opencv.org/university/free-t…
#3DComputerVision #Innovation #TechTrends #FutureofAI
2
9
234

26 Nov 2024
The Annotated NeRF: Training on Custom Dataset from Scratch in Pytorch
NeRF, a groundbreaking technique in the field of computer vision and graphics, represents a paradigm shift in the field of 3D from multi-view. NeRF models are not just capable of synthesizing novel views but also adeptly handle View-Dependent scenes and represent the depth map of a scene with complex occlusions.
In this article, we’ll explore the core principles of NeRF, walk through a PyTorch implementation from scratch, and show you how to train NeRF on a custom dataset. We'll guide you through the process and provide code and a Colab notebook to kickstart your own NeRF journey.
learnopencv.com/annotated-ne…
#NeRF #deeplearning #3dcomputervision #computergraphics #robotics #pytorch
1
30
118
18,982

23 Aug 2024
Tired of subpar product inspections? @AIDEASproject is turning up the quality control game with 3D vision and AI! 👀🤖 Want to know how? Read our latest article 👉 bit.ly/4cpRPoK #FundingChampions #AIManufacturing #3Dcomputervision
2
4
62

15 Jun 2024
Looking forward to get in touch! (Personally I'm actively seeking for a PhD position in Fall, 2025. If there's any interest, please contact me!) #3DComputerVision #EmbodiedAI
1
63

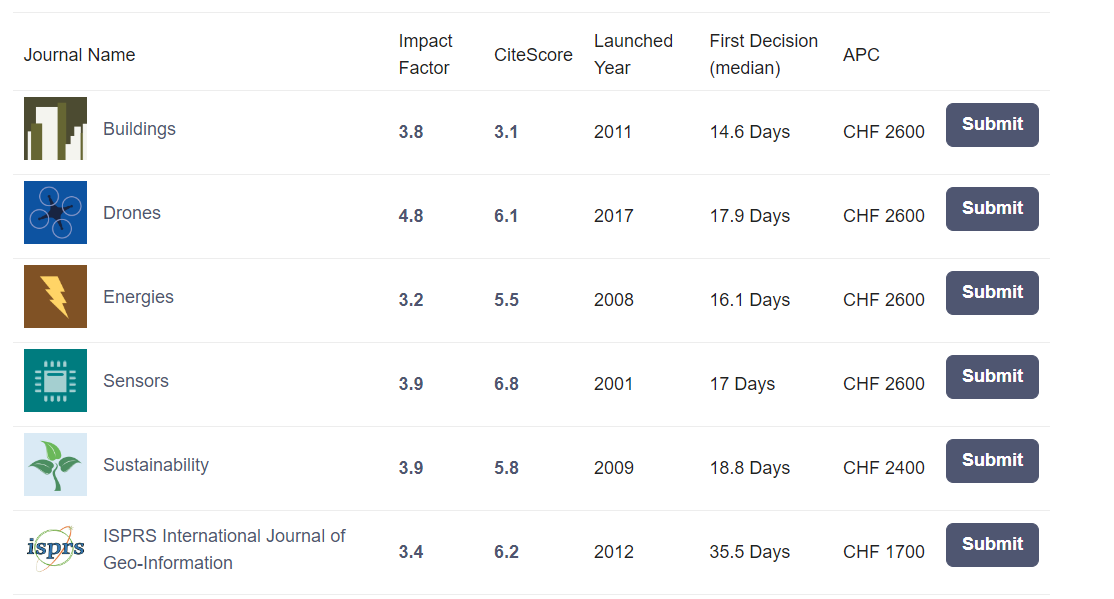
27 Mar 2024
🎊#ISPRSijgi are excited to announce one more call for papers for a Topic Collection!
📷Research Topic: #3DComputerVision and #SmartBuilding and City, 2nd Volume
📷Submit Link: mdpi.com/topics/0J25AOPO4H
📅Submission deadline: 31 December 2024
Welcome to join us🥳 #callforpaper
1
1
234

2 Jan 2024
Tonight I will be traveling to @wacv_official !
Excited to delve into the latest in #3DComputerVision.
Available for networking and discussing potential work opportunities.
Let's connect and chat about tech, innovation, and collaboration!
2
12
1,072

24 Aug 2023
🎓 Thesis Defence @UniOulu! Join Phong Nguyen tomorrow as he defends his dissertation on "Neural scene representations for view synthesis".
📅 25.08.2023 | ⏰ 12:00 | 📍 L10
Event details:
bit.ly/47BJH3D
Thesis:
bit.ly/3QIqgA2
#3DComputerVision #DeepLearning
2
12
404

Building on our series on #3D #ComputerVision, our latest blog post delves deeper into 3D optical acquisition methods. In this blogpost @ml6team provides a comparative analysis of several 3D acquisition techniques💡hubs.la/Q01WJNph0 #3Dcomputervision
1
1
115
14 Jan 2023
Don't let the fear of failure stop you from pursuing your research goals in 3D computer vision. Embrace it as a learning opportunity. #failforward #3Dcomputervision #motivation
1
245
13 Jan 2023
Research in 3D computer vision is not just about discovering new knowledge, it's about creating new possibilities. #3Dcomputervision #innovation #motivation
7
398
12 Jan 2023
Reading academic papers may be daunting, but it's an essential part of staying up-to-date in the field of 3D computer vision. #academic #3Dcomputervision #motivation
1
6
1,084

28 Apr 2022
@anis_kacem from the team talking about the very interesting topic of Implicit Function Deep Neural Networks during our bi-weekly seminar.
For more information on our research activities visit: cvi2.uni.lu #3DComputerVision #DeepLearning

1
4

8 Jan 2021
Seoul Robotics: A 3D Vision Of The Future by @marcoannunziata via @forbes forbes.com/sites/marcoannunz…
#AI #Robots #AutonomouDriving #3DComputerVision #LiDAR #SmartCities #SmartFactories #Industry40 #EmergingTech
cc @Nicochan33 @nigewillson @tlloydjones @ChuckDBrooks @cccalum
3
12
22 Jul 2020
Just finished recording my #ECCV2020 oral presentation of our DeepFit paper.
I like this new way of making research accessible. Hopefully, it will take less time to set up in the future😫#BehindTheScenes #YouTube4Research #ACRV #ANUCECS #3DComputerVision

5