

9 Sep 2025
LOST SOMETHING😰?
FEAR NOT🫶
Since its launch in SEP 2021—HKPF’s ONE-STOP LOSS REPORTING SERVICE’s handled 2️⃣0️⃣0️⃣K reports of #LostProperty!
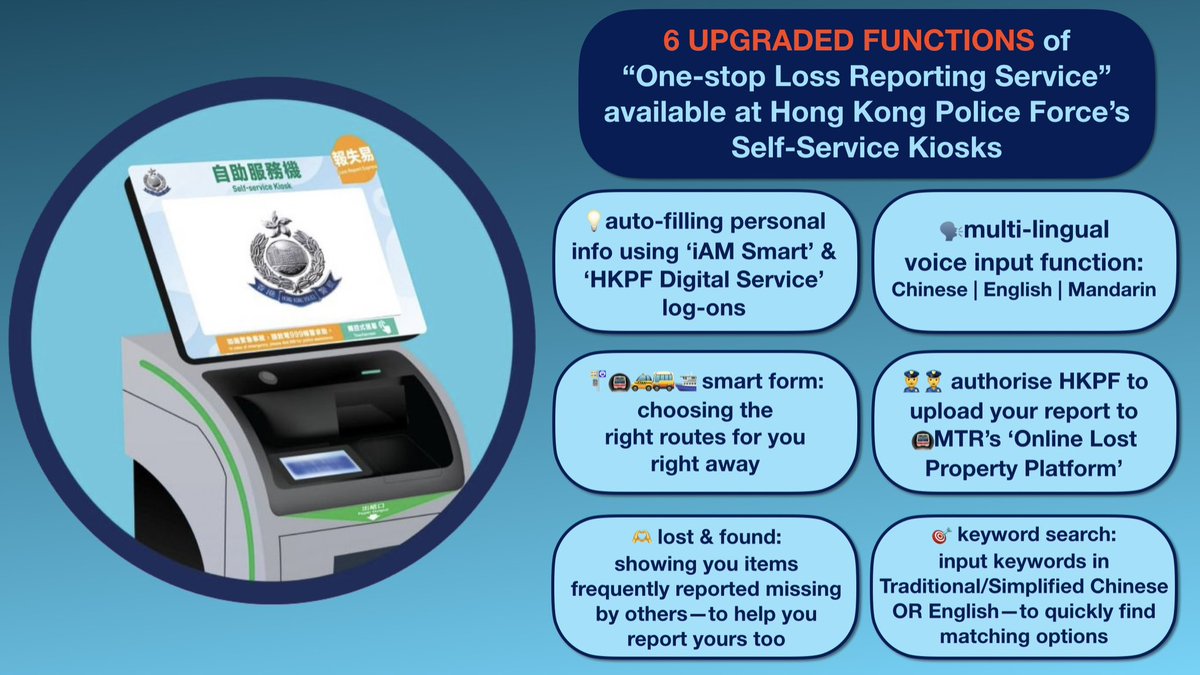
Available at our 28 #SelfServiceKiosks across the city—the service has been UPGRADED to help🇭🇰citizens➕🗺️tourists find their belongings even easier & faster (with a higher success rate too).
The 6 upgraded functions👇
1️⃣ you can access the service using your ‘iAM Smart’ & ‘HKPF Digital Service’ log-ons
—and the system will #AutoFill your personal info, further safeguarding your privacy & saving your time💡
2️⃣ you can use the multi-lingual #VoiceInput function
—to enter info in Cantonese / English / Mandarin 🗣️
3️⃣ you can input your transportation tools of choice
—and the ‘smart form’ will #AutoIdentify the suitable routes & stops/stations for you 🚇🚕🚌⛴️
4️⃣ you can authorise the #police👮♂️👮♀️to upload your report to the 🚇MTR (Mass Transit Railway)’s ‘Online #LostProperty Platform’
—to speed up & increase the chance of retrieving your lost items ✅
5️⃣ you can use the ‘#FrequentlySearched items’ & ‘quick add’ functions:
—and the system will show you the items often reported missing by people from #AllWalksOfLife🫶
6️⃣ you can use the ‘#KeywordSearch’ function
—to input keywords either in Traditional Chinese/ Simplified Chinese/ English & quickly see options matching your lost items🎯
➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖
Currently—there are a total of 2️⃣8️⃣ self-service kiosks as such across:
📍HK Island
📍Kowloon East
📍Kowloon West
📍New Territories North
📍New Territories South
—offering 🇭🇰citizens & 🗺️tourists a user-friendly alternative to seek help from the 🇭🇰Hong Kong Police Force👮♂️👮♀️ for non-emergencies.
See the full list of the 🇭🇰HKPF’s📍self-service kiosks here👇
police.gov.hk/ppp_en/contact…
➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖ ➖
Dedicated to providing citizens👴👵👨👩👦👧 & tourists🧳 with timely & helpful assistance—we will keep serving everyone in this #SmartCity with #InnoTech💡!
💙 #CommunityPolicing
💡 #NextGenPolicing
🦾 #DigitalPolicing
✨ #SmartPolicing
🇭🇰 #HKPF



1
5
2,917

20 Feb 2025
Visual mate connectors. An interactive UI to set up virtual vision-based high-precision "fiducials" on parts/objects, and have the robot autoidentify and mate those fiducials in a predictable and robust way.
Macro, micro, wide, and tele cameras for detailed and precision work on end effectors as well as the general robot
Robust tool changer library of end effectors stored on the robot itself, autonomous tool changing and calibration, open platform for third party end effectors.
Robot self-charging; ability to place a charging station close to work stations, and the robot autonomously plugs and unplugs itself while stationed.
Robust VSLAM marker-free navigation. See-and-avoid collision prevention. Body language i.e. "slow down when see humans" to ease integration with human operators and other robots. (PUDU's BellaBots are very aggressive drivers in restaurants...)
First class support for third party secondary development i.e. developer API, Open platform (the code does not need to be open source, but there must not be forced app store, forced subscription, secure boot, allow user root access, etc)
2
58


9 Dec 2017
It's very good of people to autoidentify as mutable. Makes things a lot easier.

1
3

14 Mar 2017
Liss case study: try to autoidentify sites with metallurgical waste (e.g. slag mounds), map locations w/multispectral imagery #CAAAtlanta
1
1
@felipem755 En mi caso es directo:
1.-Convertir a CBZ los CBR
2.-Auto-Tag
3.-Los que no encuentre, ajustar los campos un poco y autoidentify