
1 Dec 2025
Learn how Dyad uses Universal Differential Equations and neural networks to capture missing physics in real-world systems.
In our upcoming #webinar, we’ll walk through how Dyad Model Discovery uses Universal Differential Equations to learn the dynamics that traditional physics models miss — all while keeping structure and interpretability intact. You’ll see how neural components fit into physical models, how experimental data informs the missing terms, and how symbolic regression turns those insights into clear equations.
juliahub.com/events/leveragi…
#JuliaLang #Dyad #SciML #DataDrivenModeling #SystemSimulation #ScientificComputing #AcausalModeling #ModelBasedDesign
2
357
25 Nov 2025
Learn how Dyad uses Universal Differential Equations and neural networks to capture missing physics in real-world systems. In this #webinar, we’ll show how Dyad Model Discovery embeds neural components inside physical models, learns unmodeled dynamics from data, and extracts interpretable equations through symbolic regression.
If you work with data-driven #modeling or physics-based system #simulation, this is a session worth joining. juliahub.com/events/leveragi…
#JuliaLang #Dyad #SciML #DataDrivenModeling #SystemSimulation #ScientificComputing #AcausalModeling #ModelBasedDesign
1
4
499
21 Nov 2025
Our latest tutorial explores how #Dyad Model Discovery helps uncover missing physics in real engineering systems. Using Universal Differential Equations, you can embed a neural network inside a Dyad component, train it on experimental data, and extract interpretable equations that explain the learned dynamics.
If you’re working with partial models or unmodeled effects, this walkthrough shows how Dyad blends structure, data, and discovery. juliahub.com/blog/missing-ph…
#JuliaLang #Dyad #SciML #SystemSimulation #DataDrivenModeling #ScientificComputing #AcausalModeling #ModelBasedDesign
3
407

20 Jan 2025
A must-read for anyone working with process optimization and predictive maintenance!🔧💡
Read the full article: lnkd.in/g9K3E4p5
#IndustrialAI #DataDrivenModeling #MachineLearning #ProcessOptimization
2
37

15 Jan 2025
📚Call for Reading:
The reprint of the #specialissue "Data-Driven Intelligent Modeling and Optimization Algorithms for Industrial Processes", is now online.
🔗Welcome to read and share:
mdpi.com/books/reprint/10411…
#datadrivenmodeling #industrialprocesses
3
55

We are happy to share that our research on “Data-Driven Kinematic Modeling of Physical Origami Robots” has been published in Advanced Intelligent Systems @Advintellsyst.
youtu.be/EJIRy6ykwmQ?si=kETP…
#OrigamiRobots #DataDrivenModeling #Haptics
1
1
7
379

23 Sep 2024
Featured article from the Smart Cities Collection - Bottom-up forecasting: Applications and limitations in load forecasting using smart-meter data
Read it here > cup.org/4cIZTRW
#SmartMeterData #BottomUpModeling #DataDrivenModeling
2
144
23 Jun 2023
Bottom-up forecasting: applications and limitations in load forecasting using smart-meter data
@HarshAnand007, Roshanak Nateghi & @N_Alemazkoor
→ doi.org/10.1017/dce.2023.10
#SmartMeterData #BottomUpModeling #DataDrivenModeling #LoadForecasting #SmartMeters #ElectricityDemand
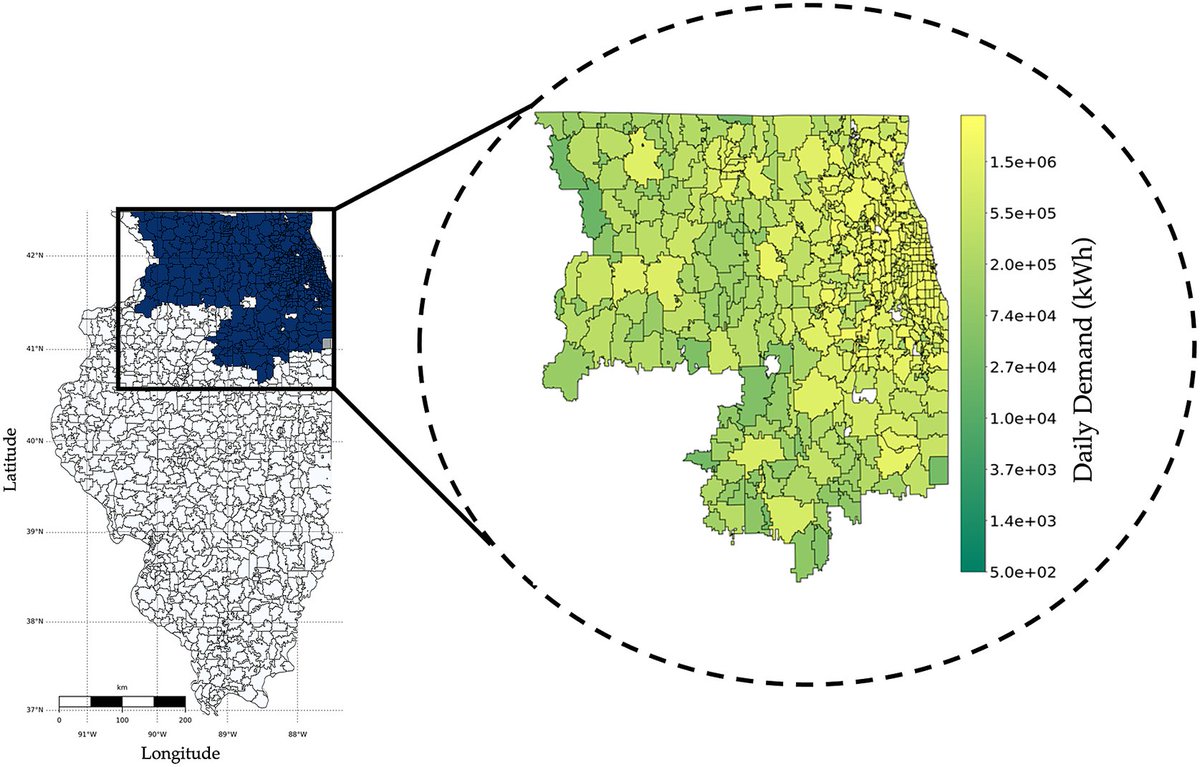
ALT Figure 3. The figure shows @ComEd’s service area in Illinois, highlighted in dark, along with the daily demand for electricity (in kWh) in the company’s operational territory.
1
2
1,859

27 Apr 2023
A recent T-RO paper from researchers @kaistpr and @YeungnamUniv illustrates how to estimate the gait of individuals with spinal cord injuries: ieeexplore.ieee.org/document…
#robots #LeggedLocomotion #exoskeletons #RobotSensingSystems #DataDrivenModeling #WearableRobotics
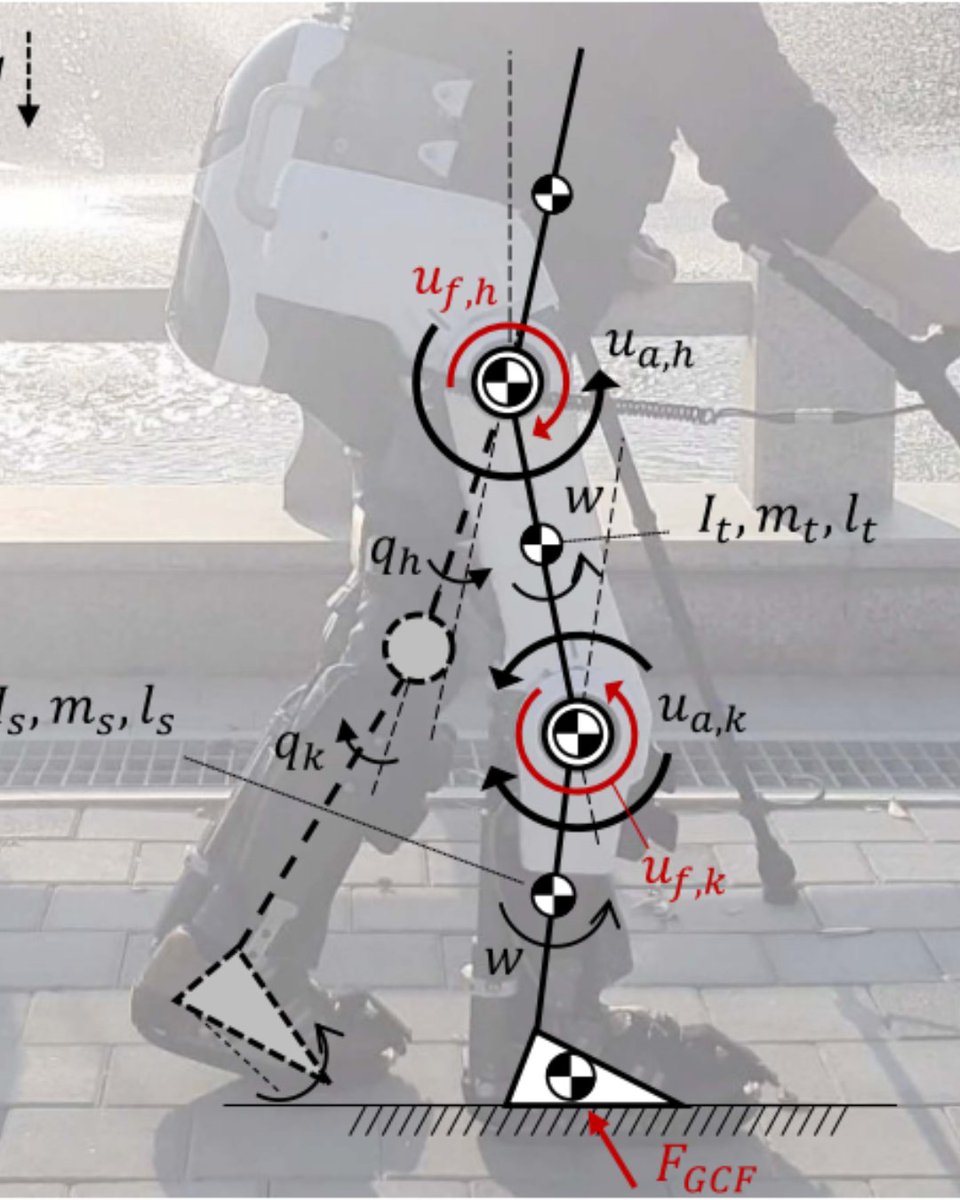
ALT Simplified diagram ofWalkON Suit. The subscriptsh, k, s, and t denote the hip, knee, shank, and thigh, respectively. The terms I, m, and l represent the inertia, mass, and length of each body segment, respectively. The variables q, ua, uf , FGCF , and w, respectively, denote the joint position, actuator torque, friction, ground contact force, and uncertainty term.
1
5
362

6 Dec 2021
What are Reduced Order Models (ROMs) by @eigensteve - really nice explanation!
👉 youtube.com/watch?v=lgc9MHLk…
#fluidmechanics #cfd #engineering #datadrivenmodeling #navierstokes
2
7

23 Mar 2021
@sadeem_wss is honored to announce the signing of a memorandum of understanding with @Kruger_Veolia to create opportunities & long-term business relationship fostering innovation & solutions in:
#SmartCities
#IoT
#GIS
#FloodMonitoring
#UrbanWaterSystem
#DataDrivenModeling

1
6

22 Dec 2019
Integrating Feedback Control and Run-to-Run Control in Multi-Wafer Thermal Atomic Layer Deposition of Thin Films sci.fo/680 #BatchProcesses #DataDrivenModeling #Control #QualityControl @Processes_MDPI
1
2
25 Sep 2019
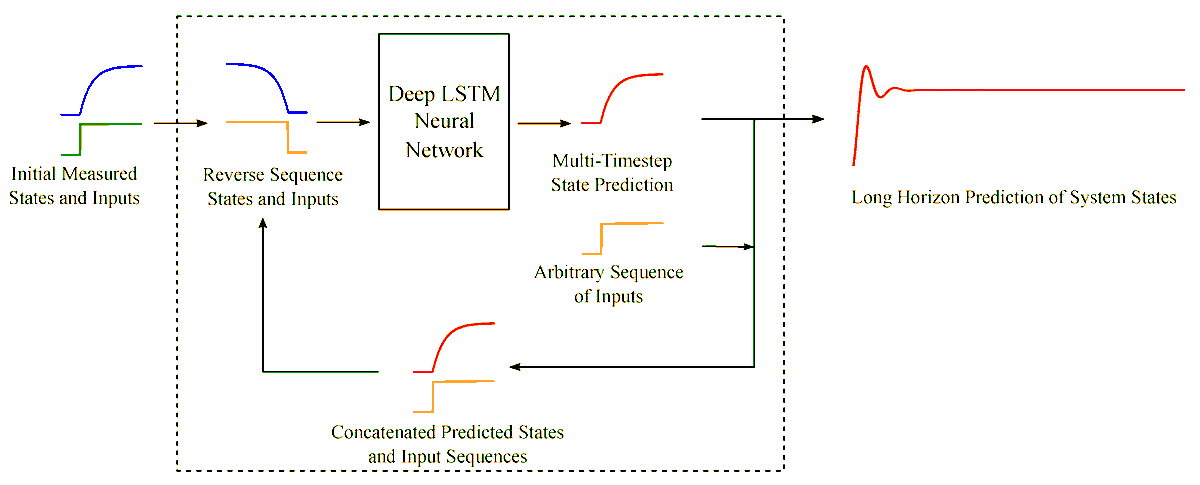
Data-Driven Predictive Modeling of Neuronal Dynamics Using Long Short-Term Memory
mdpi.com/1999-4893/12/10/203
#longshorttermmemory
#braindynamics
#datadrivenmodeling
#complexsystems
#algorithms
#journal
#openaccess
5

30 Mar 2019
IBPSA Webinar Series 2019 Session-4: A new approach to performance-based building design exploration using linear inverse modeling, Thursday, April 11, 2019 14h00 UTC @IBPSA #datadrivenmodeling #performancebaseddesign #decisionsupport
register.gotowebinar.com/reg…

2