
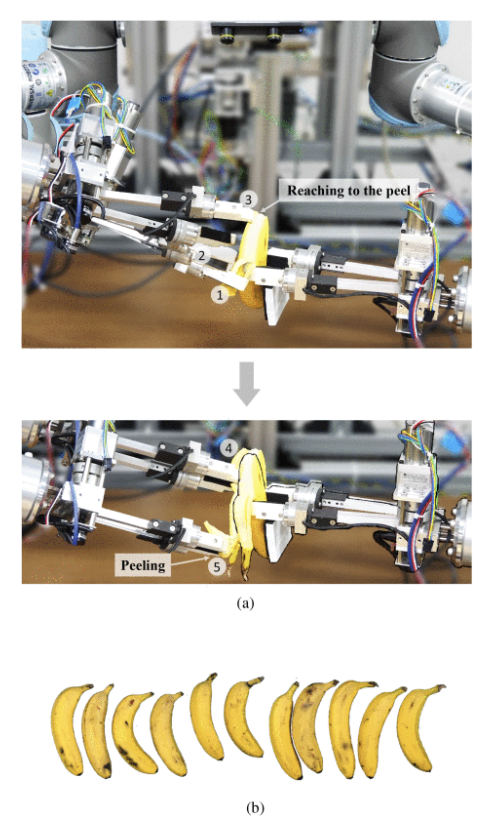
ALT Proposed GC-DA imitation learning (a) can peel real bananas of various shapes (b) using a general-purpose dual-arm robot. (a) Part of the automated banana peeling sequence in which the robot extends its end-effector to the banana (1–2) and peels it (3–4). (b) Example bananas used in the evaluation.
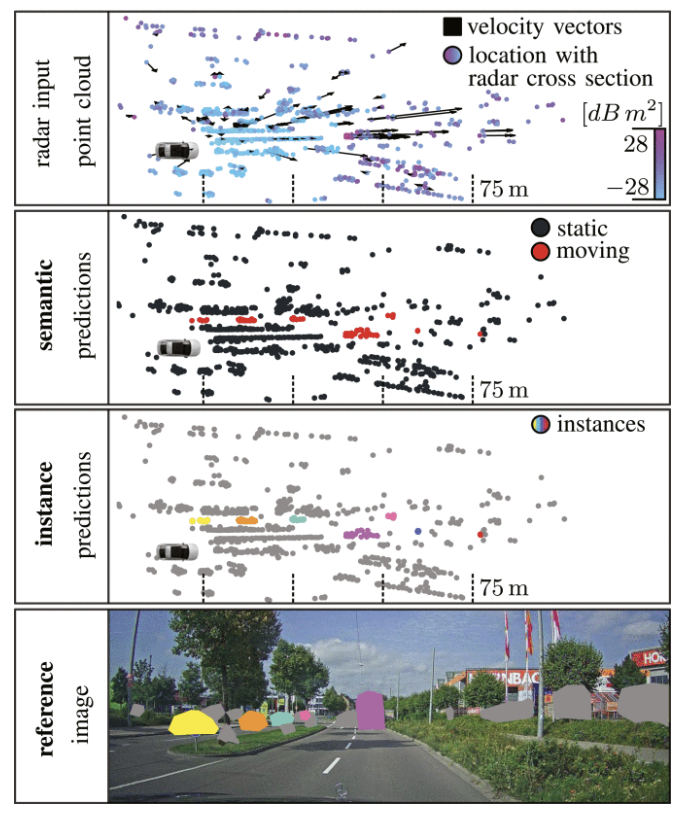
ALT Our method combines moving object segmentation (b) and instance segmentation (c) to solve the panoptic task of moving instance segmentation from sparse radar point clouds (a). The reference image in (d) illustrates the scene and includes privacy-preserving colored masks. In the image of the point cloud (c), each color represents a different instance of moving objects (static is gray). The colors in (c) and (d) correspond if the object is visible.
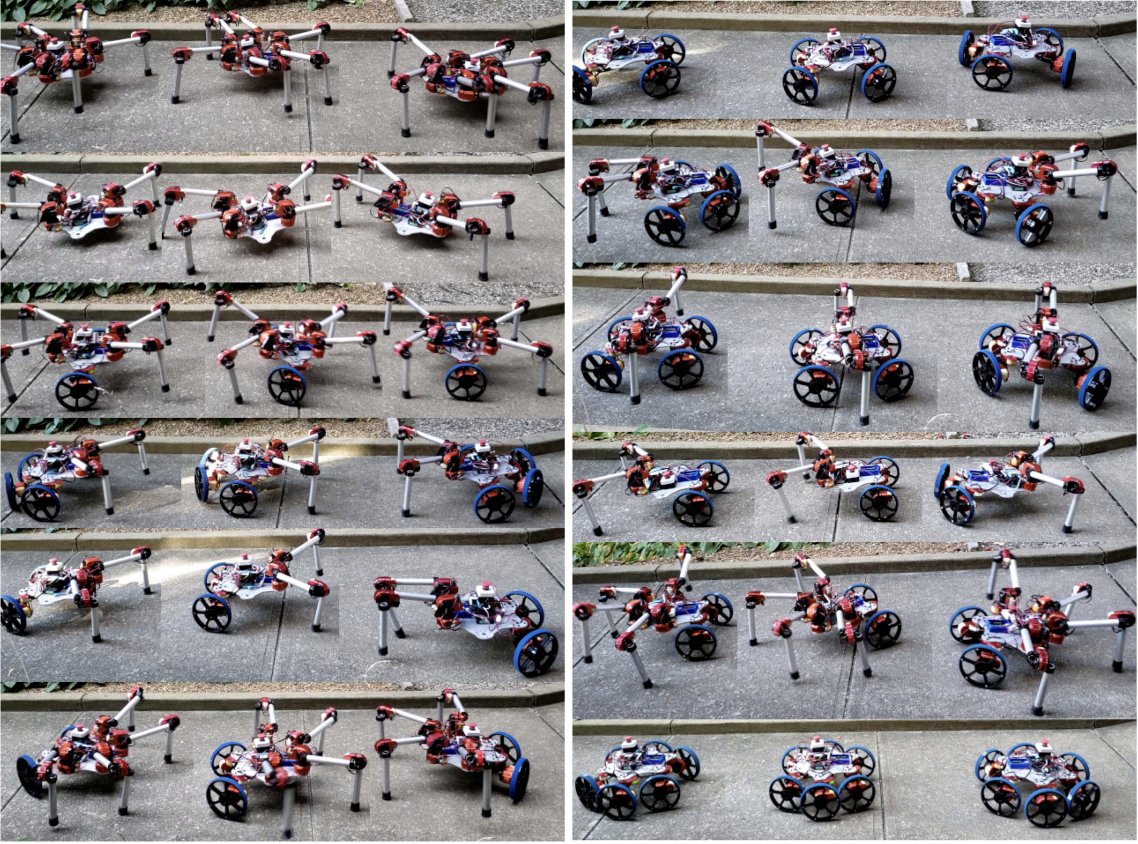
ALT Timelapses of the 12 modular designs controlled with the learned policy. The robots were teleoperated with a joystick demonstrating forward and turn-in-place locomotion on a sidewalk.