
Jun 11
Tag and email reputable journalists and politicians.
Sure hope you have some help, get people interested in exposing what is behind the movements, money people.
Gotta save our countries from both extremes, makemit a hobby! Let me know if you need info that might help.
1
1
11




Mar 23
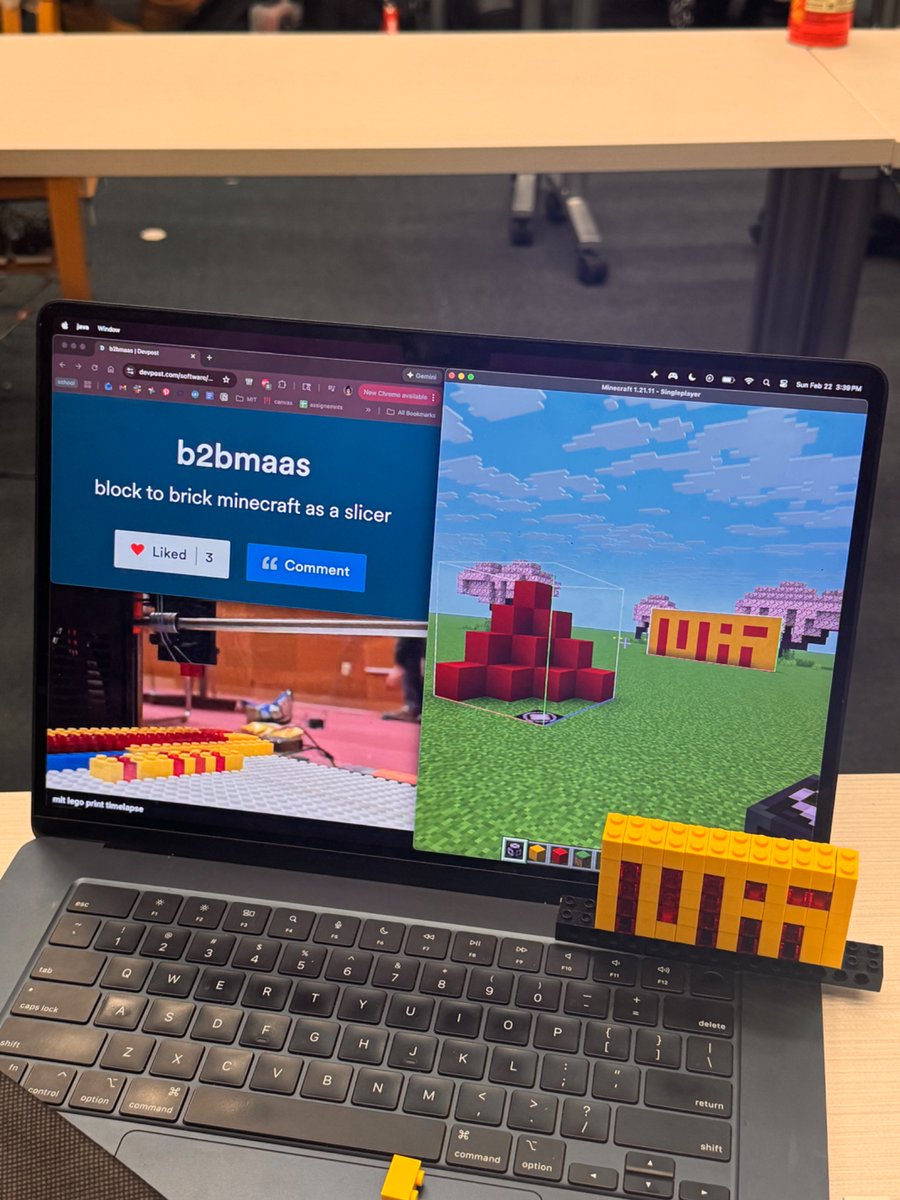
this got us 1st in our category at MakeMIT ☺️
big thanks @seeedstudio for sponsoring our category. proud of the team!
devpost.com/software/b2bmaas

4
3
46
5,304

Mar 16
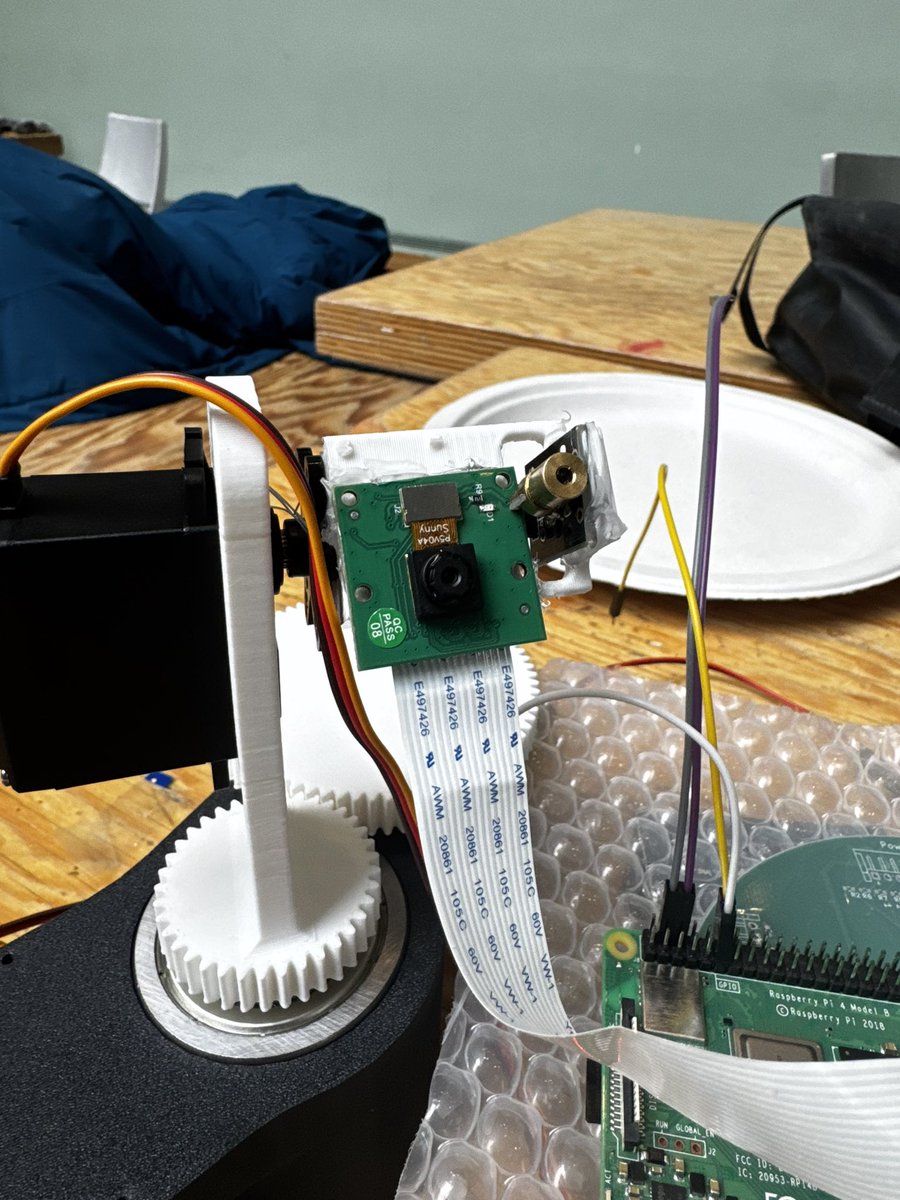
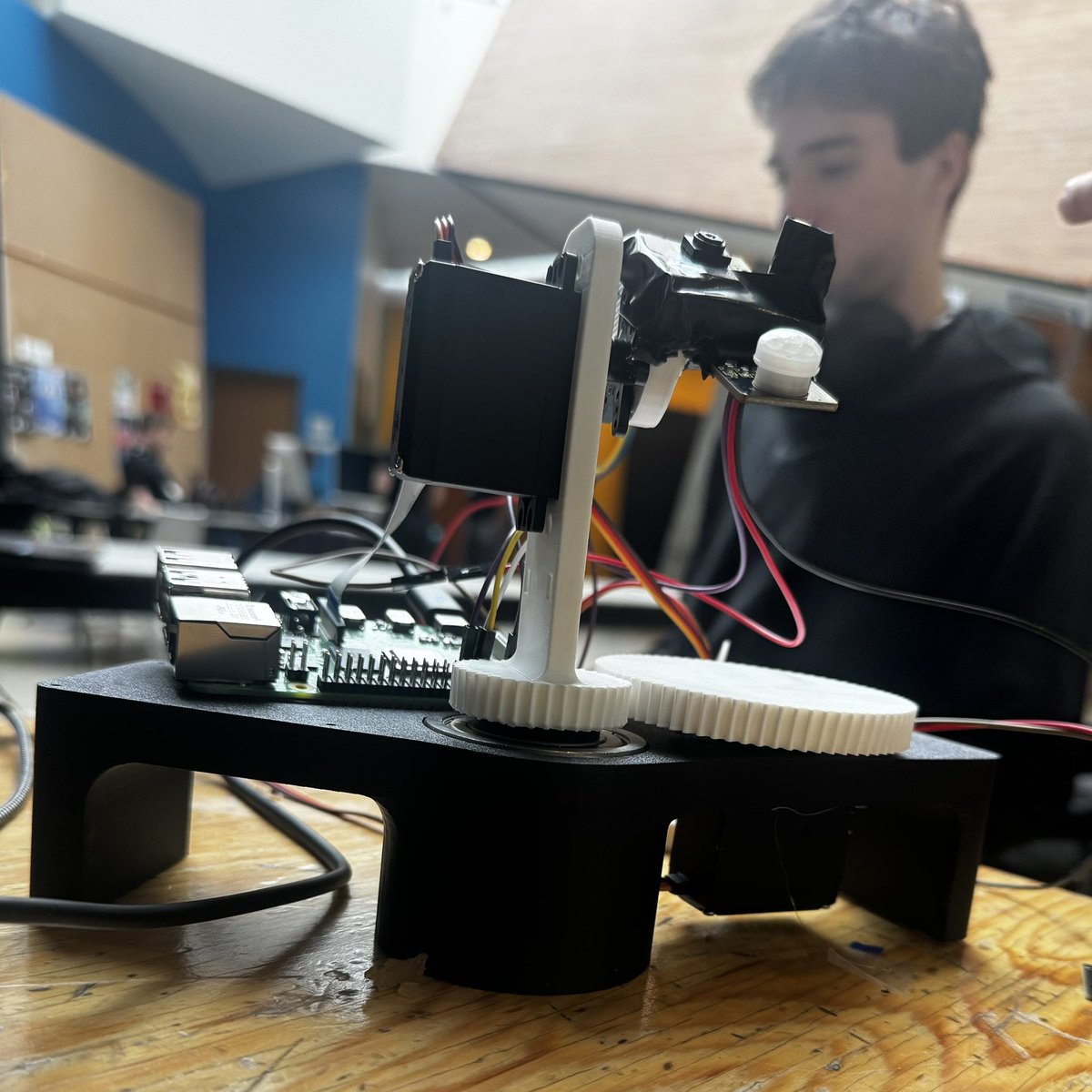
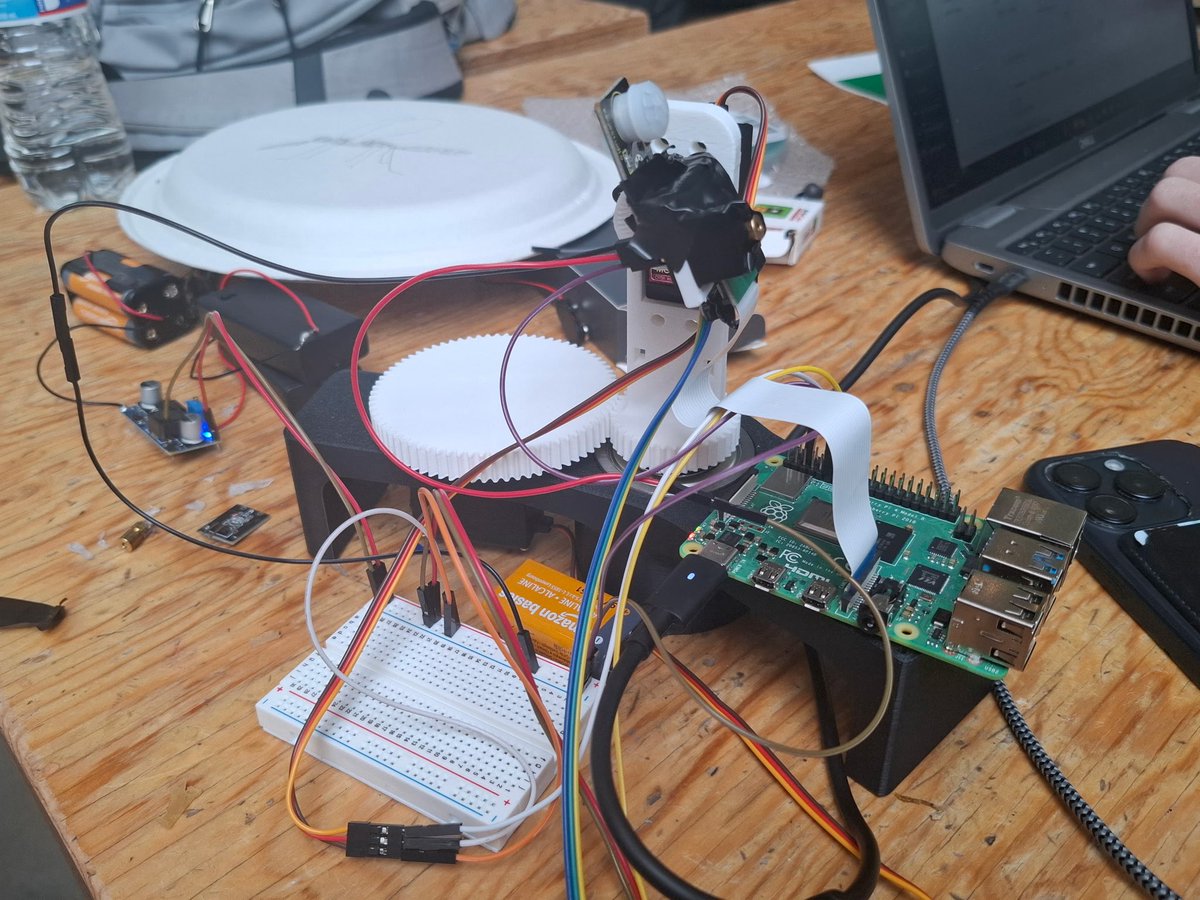
Won 3rd place (Home Defense Track) at MIT’s MakeMIT MakeAthon a few weeks back! It was the world’s biggest hardware hackathon so far (until Purdue - will be there too!) so it was really cool to see all the ideas people developed.
Was inspired by @allencontrol and came to the competition with the idea of making a similar style of turret but for a smaller target (mosquitos) using lasers. Once I got there and they revealed the different prompts we decided to switch it up to be focused on targeting paparazzi camera to ensure privacy in a home.
Not bad for a first Makeathon and a random team!

2
75

Mar 10
Way to be a dumbass and makemit political!! What a selfish dirtbag!!
2
10

Feb 24
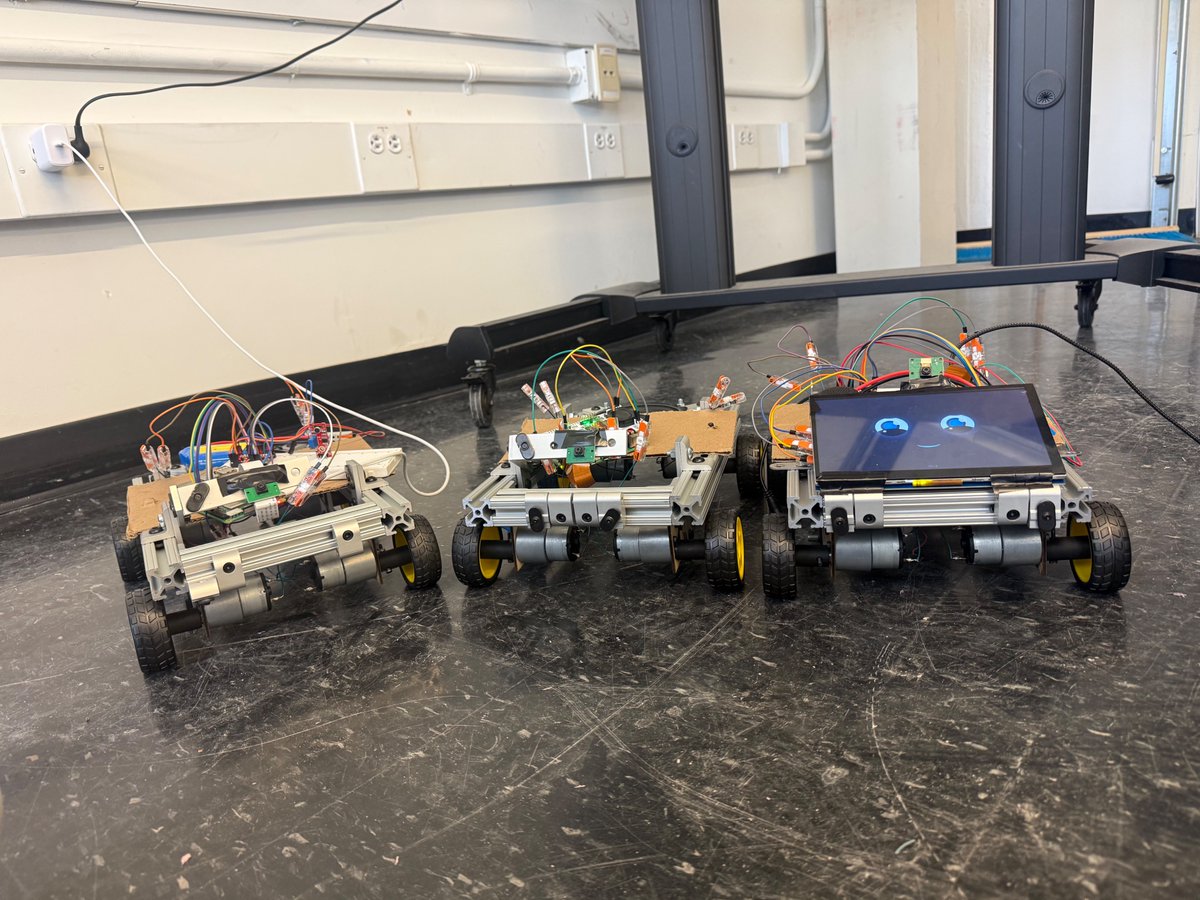
Won 3rd place at the MakeMIT x Harvard hackathon this weekend after ~24 hours of building hardware at MIT.
Built a small robotic swarm called Triad.
The idea was: give AI agents physical bodies (and describe capabilities as tools), make a few of them and see what happens when they coordinate.
Each robot ran an OpenClaw agent on a Raspberry Pi 5.
Movement, vision, and speech were exposed as tools the agent could call. They could see, follow people, talk, and decide when to act.
Feels like there’s a real gap around agent-to-agent communication and how physical capabilities are represented.
That’s the part I want to keep digging into.


1
7
130

Feb 23
What a weekend at MakeMIT!!!
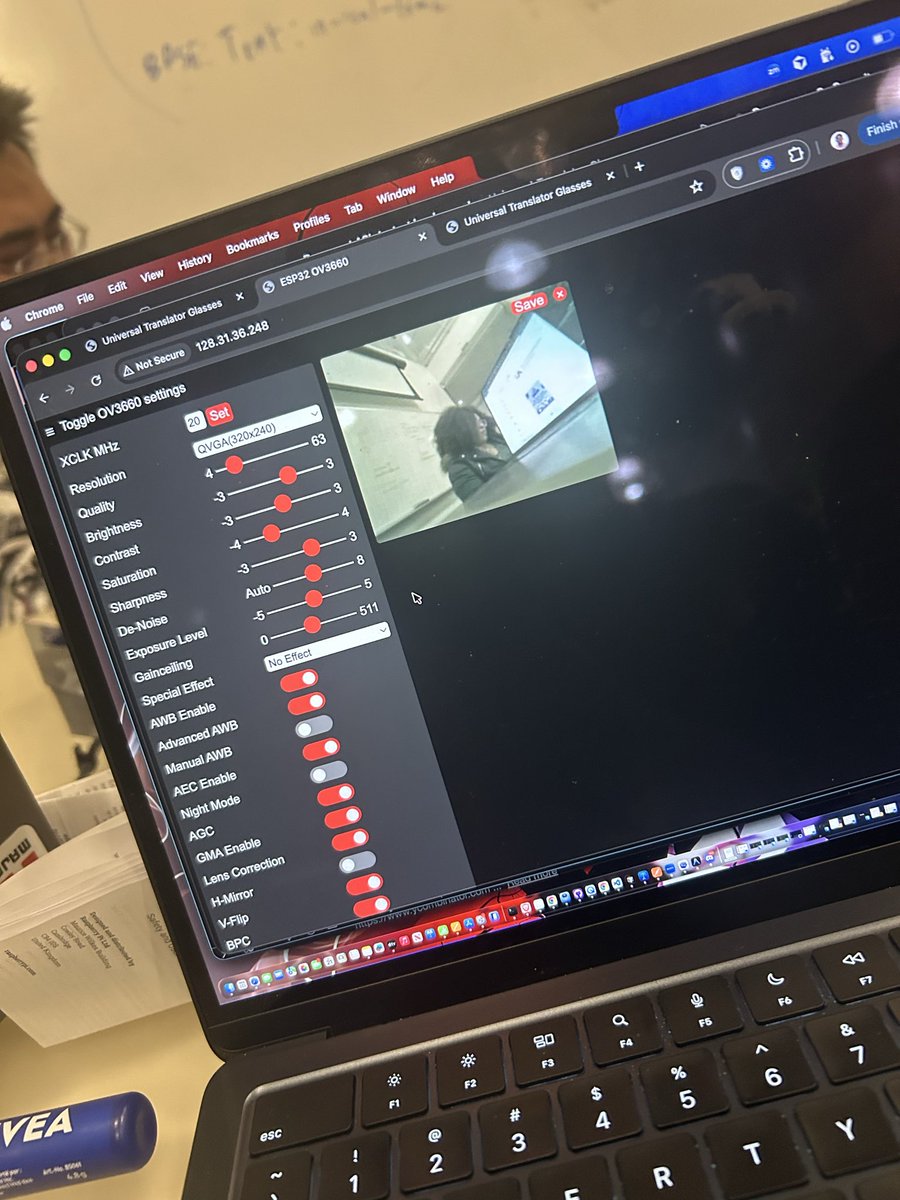
my team built UT-Glasses, a glasses that allows users to watch people speaking in ASL and get the text in their screen.
first hardware hackathon and i sure learnt a lot.
looking forward to the next 🤞

1
8
100
Feb 17
pulling up to MakeMIT this weekend.
overstimulated for my first hardware hackathon. genuinely can’t wait.
@MIT what do you have for me 🫴
1
4
95

Yes. ‘Avoid your tiggers.’ Um, I have to breathe. We had a brish fire nearby this week, I’m sucking my inhaler to be barely able to makemit room to room. I haven’t left fhe house. I can’t control air, I don’t live in a hyperbaric chamber.
2
51

Jan 30
Follow the money to Amy's account before the election season can makemit disappear. She'll be worse for MN than Tampon Tim
1
24
100
913

Hello pals! we bin digging da cats out but J sez it is too cold fer owah pawsies. J takin' down XMas and wunderin' of T gonna makemit to thw airport tomorrow to got to TexArse!
3
6
104

11 Dec 2025
We need a battle/tournament to see which patron is the fav!
Makemit with polls
3
285

5 Nov 2025
Profits??? I think he means “Benefits”. Oh man, how did this guy makemit abroad.
7
438

7 Oct 2025
Start creating regional jobs makemit easier for young people and younger families to buy regionally make regional Australia great!
1
34

31 Jul 2025
I CANT EVER MAKEMIT TO B I CANT MAKE IT TO THE FINALS IM SOBNING THESE HORSEGIRLS NEED TO WIN AND I CANR DO OT LOOk AT MY WEAK ASS
2
88

30 Jun 2025
MAKEU T SOTP MAKE TI STOL MAKE TI STOL MAKE IT STO LMAME YIS TOP MAKE TI STOP MAKE TI STOP .AME IT STO P MAME JT STOP MAKE IT STOP MAKA IT STOP MAKE TIMSOTP MAKE IT SOTPNVSKNENTIS YOP MAKENTI STOP MSAN .R.IT STKL .MSKE IT KSOBP MAKEMIT SOGO MKAE PITBSPOT SMME IT OP MAKENITMSTIOP
1
3
192


@fumoneyprinter
Is there a way to makemit so it doesn’t look like only a dev wallet is profiting thousands while the holders maybe have a few hundred in profit at most
1
24

22 Jan 2025
Depends on how it is made. some folks makemit sweet, some spicy. If it is sweet I need Zinfandel to eat it. If it is spicy, I need Beaujolais to drink it. Either way I cannot eat it without wine.
1
142

11 Nov 2024
Unfortunately its seems hard for coaches to stick to it, they promote it and makemit part of their team culuture on paper…. but prefer the W’s over respecting the plan and having to sit a “top” player. Then chaos gets in the room and the W’s are far more apart. 😕
2
178