
Jun 10
The algorithm begins at the start point, then repeatedly throws random samples into the environment. Each time a sample appears, the tree finds the closest branch it already has and takes a small step toward that sample, as long as the motion does not collide with an obstacle.
What makes this work is the geometry of empty space. Large unexplored regions are more likely to attract new samples, so the tree naturally stretches into open areas without needing a full grid, a full wavefront, or a complete map of every possible route.
At first, the motion looks almost chaotic because the tree is reaching in many directions at once, but over time its branches probe corridors, slide around obstacles, and eventually touch the goal region. Once that happens, the path is recovered by tracing the connected branches backward from the goal to the start.
#RRT #MotionPlanning #PathPlanning #Robotics #ShortestPath #ComputationalGeometry
1
9
723
Jun 10
In 1998, Steven LaValle introduced a beautifully strange way to search through a complicated world
Don’t fill the whole space, and don’t try every possible path. Grow a tree.
That is the idea behind Rapidly-Exploring Random Trees, or RRT.
#RRT #MotionPlanning #PathPlanning #Robotics #ShortestPath #ComputationalGeometry
2
14
77
5,811

[Series 9 | Aerospace & Precision Motion | #8]
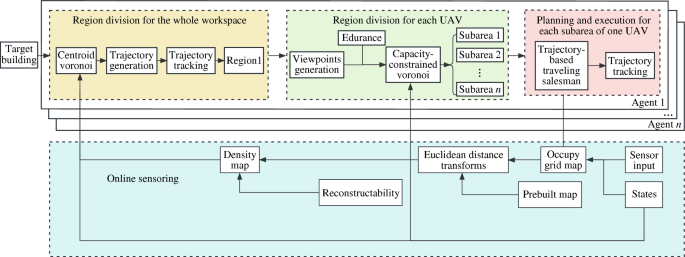
🚁🏗️ How can multiple UAVs inspect large-scale infrastructures more efficiently?
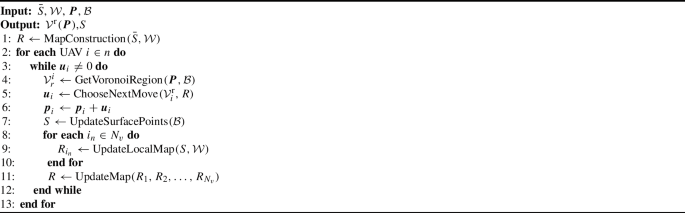
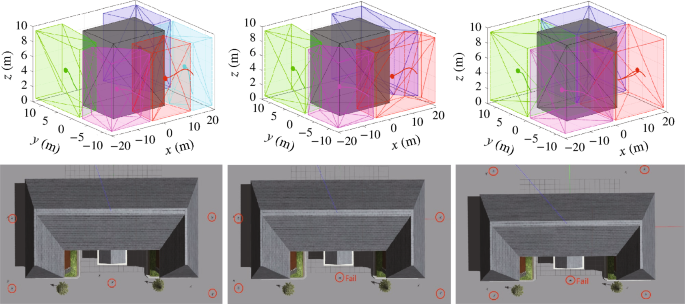
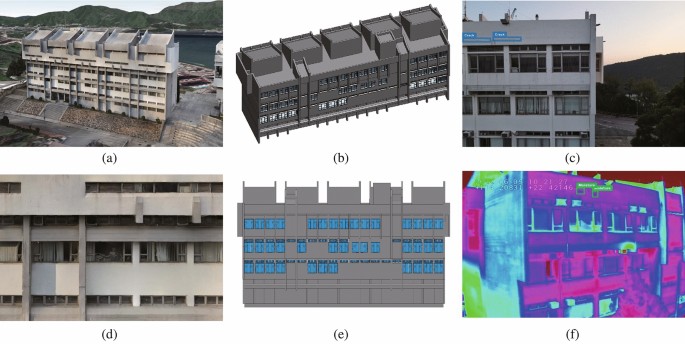
A hierarchical cooperative framework combines exploration, dynamic workload balancing, region partitioning, and energy-aware path planning to reduce mission time while maintaining high-quality infrastructure reconstruction.
💡💡💡
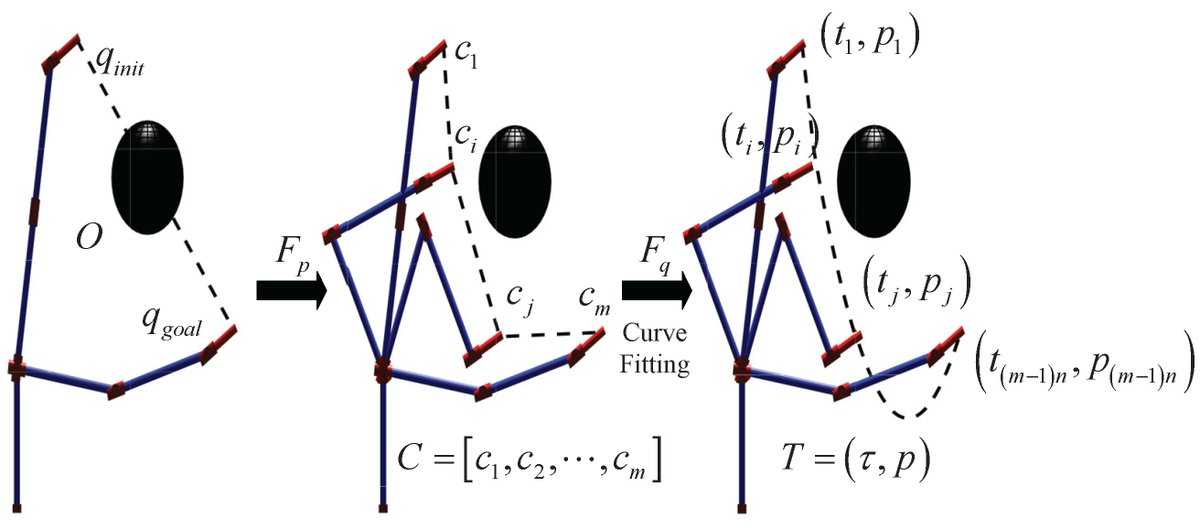
Title: A hierarchical multi-UAV cooperative framework for infrastructure inspection and reconstruction
Authors: Chuanxiang Gao, Xinyi Wang, Xi Chen, Ben M. Chen
More at: rdcu.be/dJR20
#UAV #MultiUAV #InfrastructureInspection #AutonomousSystems #PathPlanning #Robotics
1
9

Jun 8
our own controller! RTOS on a rasberry pi for the master and pathplanning etc on a jetson
1
1
38


May 22
#Article: "Guide Robot Based on Image Processing and Path Planning"
👨🏫Authors: Chen-Hsien Yang, Jih-Gau Juang
👉Paper link: mdpi.com/2075-1702/13/7/560
#GuideRobot #PathPlanning #HumanRobotInteraction
@ntou_tw
@MDPIEngineering
@MDPIOpenAccess

1
2
32

May 13
SDA-RRT*Connect: A Path Planning and Trajectory Optimization Method for Robotic Manipulators in Industrial Scenes with Frame Obstacles
✏️ Guanda Wu et al.
🔗 brnw.ch/21x2rfE
Viewed: 2121; Cited: 7
#mdpisymmetry #roboticmanipulator #pathplanning
@MDPIEngineering
2
2
31

Apr 13
📢 #highlycited paper
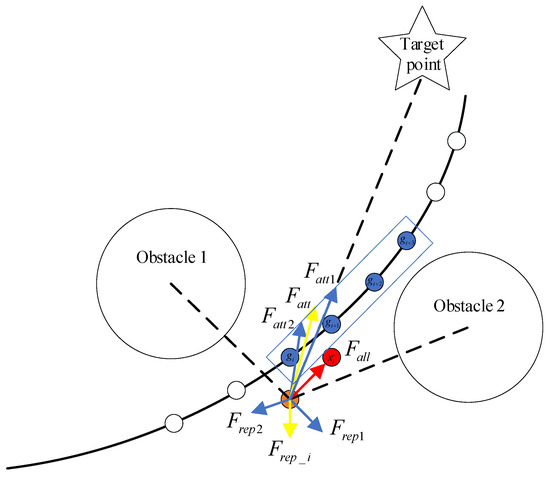
📚 Three-Dimensional #PathPlanning for #Post_DisasterRescue UAV by Integrating Improved Grey Wolf Optimizer and Artificial Potential Field Method
🔗 mdpi.com/2076-3417/14/11/446…
👨🔬 by Dan Han et al.
🏫 Civil Aviation Flight University of China/Chinese Academy of Sciences/University of Chinese Academy of Sciences
#unmannedaerialvehicle #greywolfoptimizer
1
3
47
Apr 13
📢 #highlycited paper
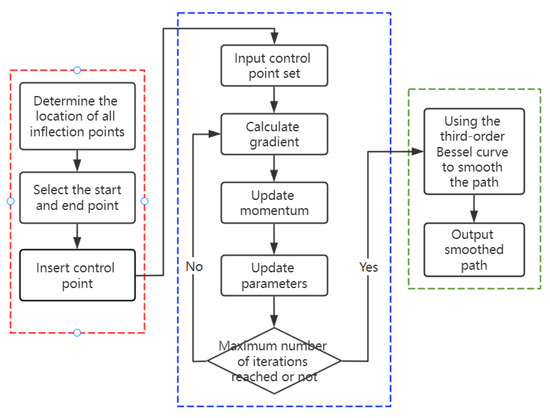
📚 #MobileRobot #PathPlanning Algorithm Based on NSGA-II
🔗 mdpi.com/2076-3417/14/10/430…
👨🔬 by Sitong Liu et al.
🏫 Beijing University of Civil Engineering and Architecture/Beijing Key Laboratory of Intelligent Processing for Building Big Data
#NSGA_IIalgorithm #Béziercurve
1
3
45

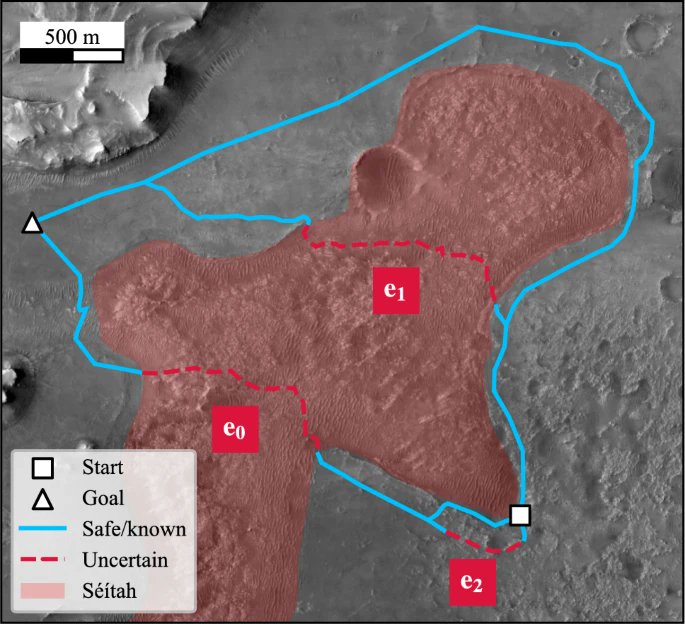
🆕 Risk-averse traversal of graphs with stochastic and correlated edge costs for safe global planetary mobility by @OLamarre & @domo_mr_roboto
🔗ap.lc/iPgef
#RiskAwareness #PathPlanning #Autonomy @Nord_Space @utiasSTARS @UTIAS @UofTRobotics
1
3
172

Built a 3D drone simulation that navigates using Artificial Potential Fields 🤖
🔗 github.com/Jitendra4Jalwaniy…
@3blue1brown
@karpathy #Robotics #PathPlanning #MachineLearning
2
1
4
76

Mar 25
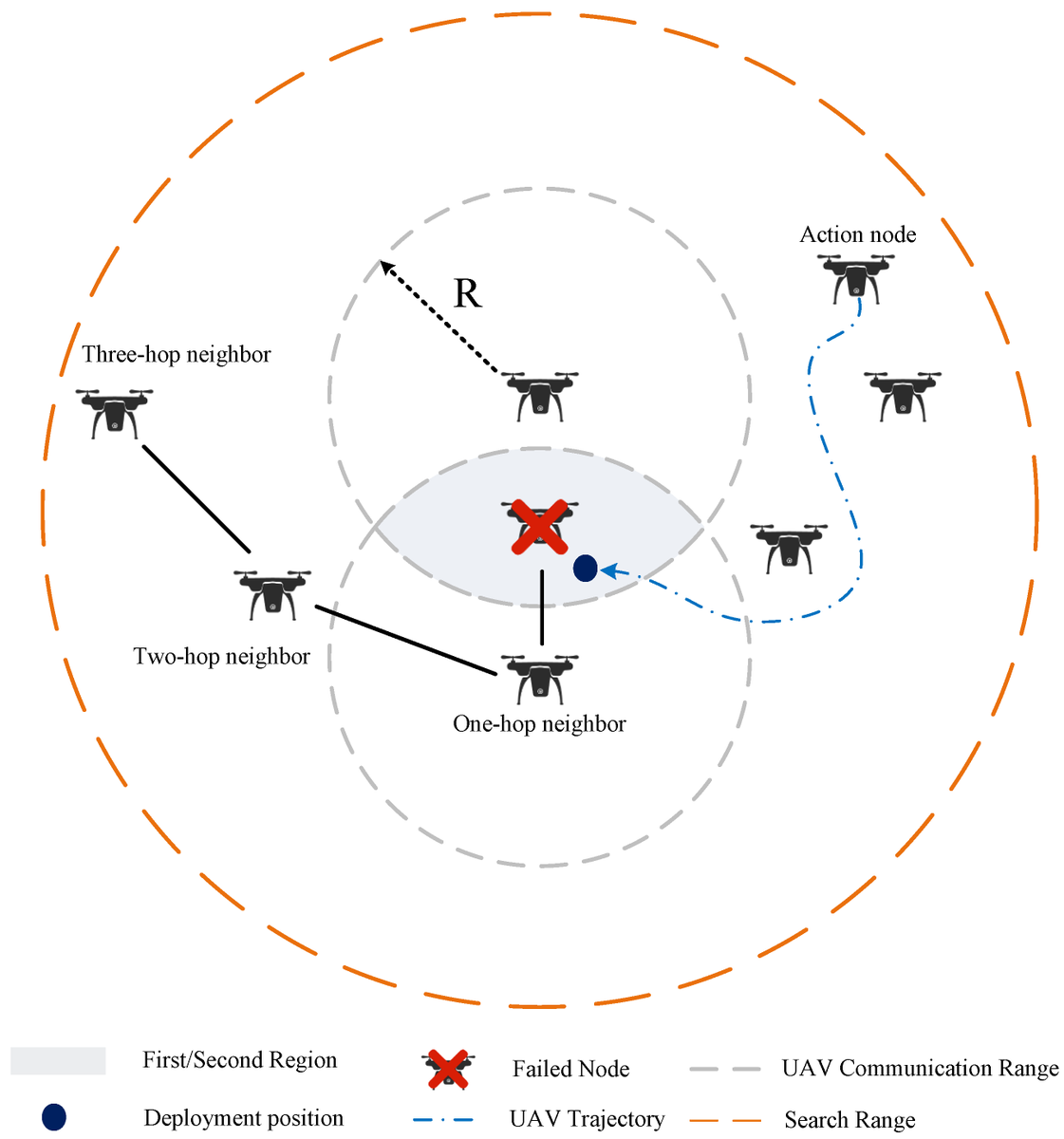
🌿New Publication🌿
#Topology Reconstruction Algorithm Design for Multi-Node Failure Scenarios in #FANET
By Jia-Wang Chen, Hua-Min Chen, Shaofu Lin, Shoufeng Wang and Hui Li
👉See the paper: mdpi.com/2504-446X/10/3/159
#UAV #pathplanning
1
2
176
Feb 25
#Article: "A Survey on Path Planning for Autonomous Ground #Vehicles in Unstructured Environments"
👨🏫 Author: Nan Wang, Xiang Li, Kanghua Zhang, Jixin Wang, and Dongxuan Xie
👉 More information: mdpi.com/2075-1702/12/1/31
🌟 Citations: 43
#PathPlanning

1
2
44

Feb 19
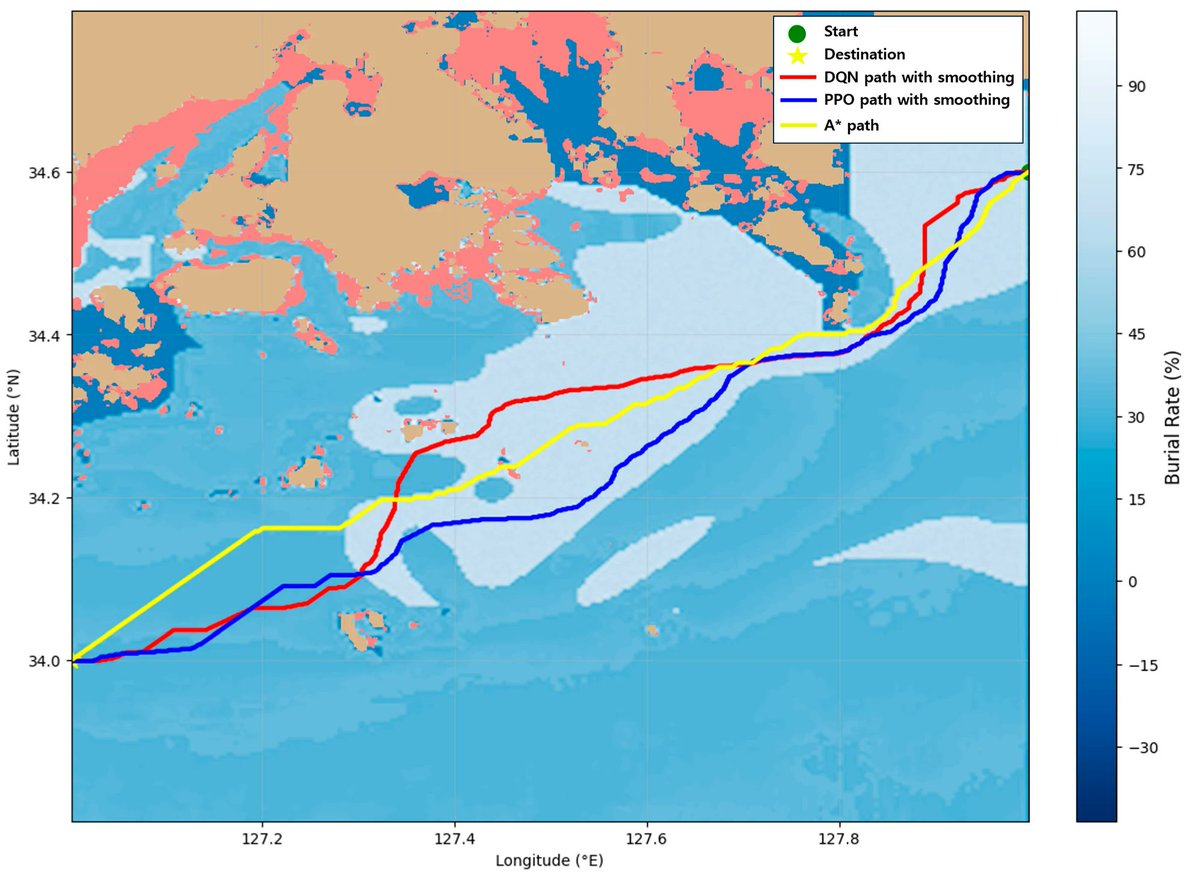
🚀 Fresh research in #JMSE!
"Development of an Initial Burial Rate Estimation Simulator for Bottom-Contact Mines and a Reinforcement Learning-Based Mine-Laying Route Optimization Method"
📖 Access: brnw.ch/21x05gu
#naval #mine #pathplanning #route #reinforcementlearning
1
2
38
Feb 19
#Callforpaper 👇👇👇
#ship #autonomous #GNC #pathplanning
#dynamic #maritime #digitaltwin #navigation
🌊Special Issue "Autonomous Ships: Control Systems and Intelligent Navigation"
👨🎓Guest Editors:
Dr. Lúcia Moreira
Dr. Lianwu Guan
💻More at: brnw.ch/21x05ba
2
2
46



Jan 5
I wrote an article on "Dijkstra vs. A*": explained with math, intuition, and Python implementation:
tinyurl.com/yzdp6hbd
I also explain how i built an interactive path-planning demo, and I compare the two algorithms based on their efficiency:
#Robotics #PathPlanning

2
122

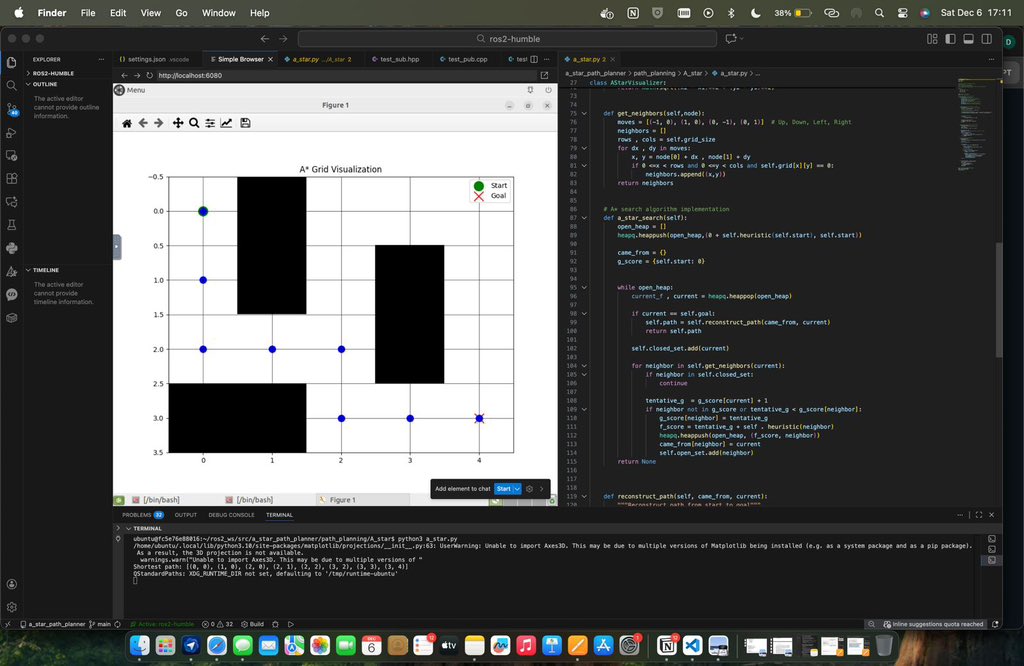
11 Dec 2025
Day 27/32: Robot Navigation
Path Planning (The Strategy)
Knowing where the kitchen is (SLAM) is one thing. Walking there without hitting the dog is another.
This is called Path Planning.
When you ask the @openmind_agi OM1 to "go to the kitchen," it doesn't just start walking. In a split second, it runs a simulation:
It identifies the start point (Sofa) and end point (Fridge).
It calculates a "trajectory" - which means the specific line to follow.
It checks for obstacles (Shoes on the floor? A chair pulled out?).
If the path is blocked, it recalculates instantly. It’s like having Google Maps running inside your head for walking across your living room.
#OpenMind #PathPlanning #AI #Navigation #Tech

10 Dec 2025

Day 26/32: How Robots "See" (SLAM)
SLAM (Mapping the World)
When you walk into a new room, you instantly understand the layout: "There's a wall, there's a chair, here is the door."
For a robot, a room is just a blank void until it maps it.
The @openmind_agi OM1 uses a technique called SLAM (Simultaneous Localization And Mapping).
It's a massive mathematical challenge. The robot has to do two things at the exact same time:
Mapping: Draw a map of the unknown room.
Localization: Figure out exactly where it is standing on that map.
Without SLAM, a robot is blind. With it, the OM1 can navigate a messy living room without bumping into the coffee table.
#OpenMind #Robotics #SLAM #ComputerVision #AI

4
3
232

7 Dec 2025
The main difference between A and Dijkstra’s algorithm is that Dijkstra’s doesn’t use a heuristic. I’m so comfortable implementing Dijkstra and A* that I could write it even if someone woke me up from sleep. #robotics #pathplanning
6 Dec 2025

Start with a priority queue to explore nodes by f = g h. Track g (cost from start) and h (heuristic to goal). Expand lowest f first, update paths if cheaper routes appear.
#robotics #pathplanning
2
201
6 Dec 2025
Start with a priority queue to explore nodes by f = g h. Track g (cost from start) and h (heuristic to goal). Expand lowest f first, update paths if cheaper routes appear.
#robotics #pathplanning
6 Dec 2025
As a roboticist, I see life in paths, shortest, precise, optimal. 🤖 A* algorithm mirrors this, using heuristics to smartly find the goal, unlike Dijkstra which checks every node. Choose the right heuristic, Manhattan or Euclidean, and navigate efficiently.
#Robotics

2
442