
Jun 11
I think it would be way funnier if they added telops/captions indicating who has soccer experience and who doesn’t.
This video is Ichiro trying a basketball challenge. He famously said, 'I can’t do anything but baseball.
youtube.com/watch?v=oyTy7hTe…
1
519

Feb 6
gm gm,
I've gone through a few robot training sessions via TelOps, and I've noticed a common point, which most people will likely agree with. If not, please leave your feedback below 🤓
🧠 TeleOps Training 101: Common Pitfalls When Teaching Robots in the Real World
Tele-operation (TeleOps) is one of the most powerful ways to train robots today. It lets humans demonstrate real-world tasks directly, turning everyday actions into valuable training data.
But TeleOps comes with its own challenges.
1. Latency: When the Robot Feels “Out of Sync”
What happens: My actions feel delayed. The robot responds a beat too late.
===========
2. Jerky Movements = Confused Robots
What happens: The robot’s arms shake, overshoot, or move unnaturally.
Why it matters: Robots learn how you move, not just what you do.
===========
3. Camera Perspective Problems
What happens: The robot keeps bumping into objects or misjudging distance.
Why it matters: If you can’t see clearly, neither can the model later.
===========
4. Operator Fatigue Is Real
What happens: The long waiting time to use the training leads to a loss of inspiration.
Those are some of the thoughts I've had, but I still believe that robot training and model development are the future trends, and @PrismaXai is pioneering them ✨.
8
98

i love when the editors use the telops to communicate with the ppl on the show


2
124

Jan 9
credits himself for genga only but looking at the credits you'd never know that.
This would apply to a lot more than just SAC, most of the anime in this era would suffer from the way telops were designed.
Likewise for animation directors, probably a lot of stuff where people
1
9
512

6 Oct 2025
Tesscorn at the Telops Sales Meeting 2025 Exciting 3 days of innovation & collaboration in beautiful Québec City. Looking forward to building stronger partnerships.




3
6
190

10 Jun 2025
How do you know there are telops?
I’m willing to bet there aren’t. It’s not a safe approach.
2
2
76

24 May 2025
japanese subtitle telops make me want to rip my hair out enough as it is looking at this makes my skin crawl
1
256
19 Apr 2025
that's correct. It's not that uncommon for older anime to have incomplete telops since they were limited in physical space on the screen.
3
163

26 Dec 2024
Tems would lay like a elephant & Tyla jump around d bed like a telops
1
3
1,541

1 Oct 2024
@VivekLingan Sr. App Engr at @telops Sales Meeting last week in Bordeaux, France. Telops hyperspectral imaging & IR cameras are used for research applications by defence and academic institutions. Useful for ballistic studies, material analysis, exp mechanics, combustion flow etc


2
3
59

21 Sep 2024
#アニマルフォレスト
#久高ダンテアニマルフォレスト
#久高ゆいアニマルフォレスト
その鳴き声は、子猫じゃなくてラベンダーの鳴き声じゃないかな。
ラベンダーが様子を見に来て、子猫が子猫なりにラベンダーに威嚇してるかな。
キャットタワーに隠れてる写真と、ラベンダーと子猫、カリカリ食ってる写真。
コレ、全部同じ部屋で7畳しか無いんですよ。
広く思うでしょう。
一般家庭は家具や電化製品があるから狭く見えても、押し入れや天袋があったりして
猫特有の上下運動が出来る。
#アニマルフォレスト は広く見えて、
たかが1室7畳に、10〜12匹が押し込めてるだけ。
無駄な装飾品や映え撮影、テロップでごまかすなよ。
A photo of the cats hiding in the cat tower, a picture of the cat lavender and a kitten, and a picture of the cats eating crispy.
There are 10 to 12 cats in the same room of only 7 tatami mats.
Don't cheat with useless ornaments, photo shoots, or telops.
Fuckin’ A multi-headed cat hoarder bastards.
#保護猫活動
#ねこすたぐらむ
#猫好きさんと繋がりたい
#Vegan
#StopCatTorture
#CatAbusers
#CatLovers
#ASPCA
#AlleyCatAllies
#HumaneSocietyInternational
#SeventhdayAdventistChurch
#UniversityOfBerkeleAlumni
#CatHoarder_Exploiter
#injured_cat_Munchausensyndrome_by_proxy
#AnimalForestJp
#アニマルフォレスト
4
8
241
Telops Fast M3k

7 May 2024

What high speed ir camera is this ? Spec?
3
1
15
3,469



19 Apr 2024
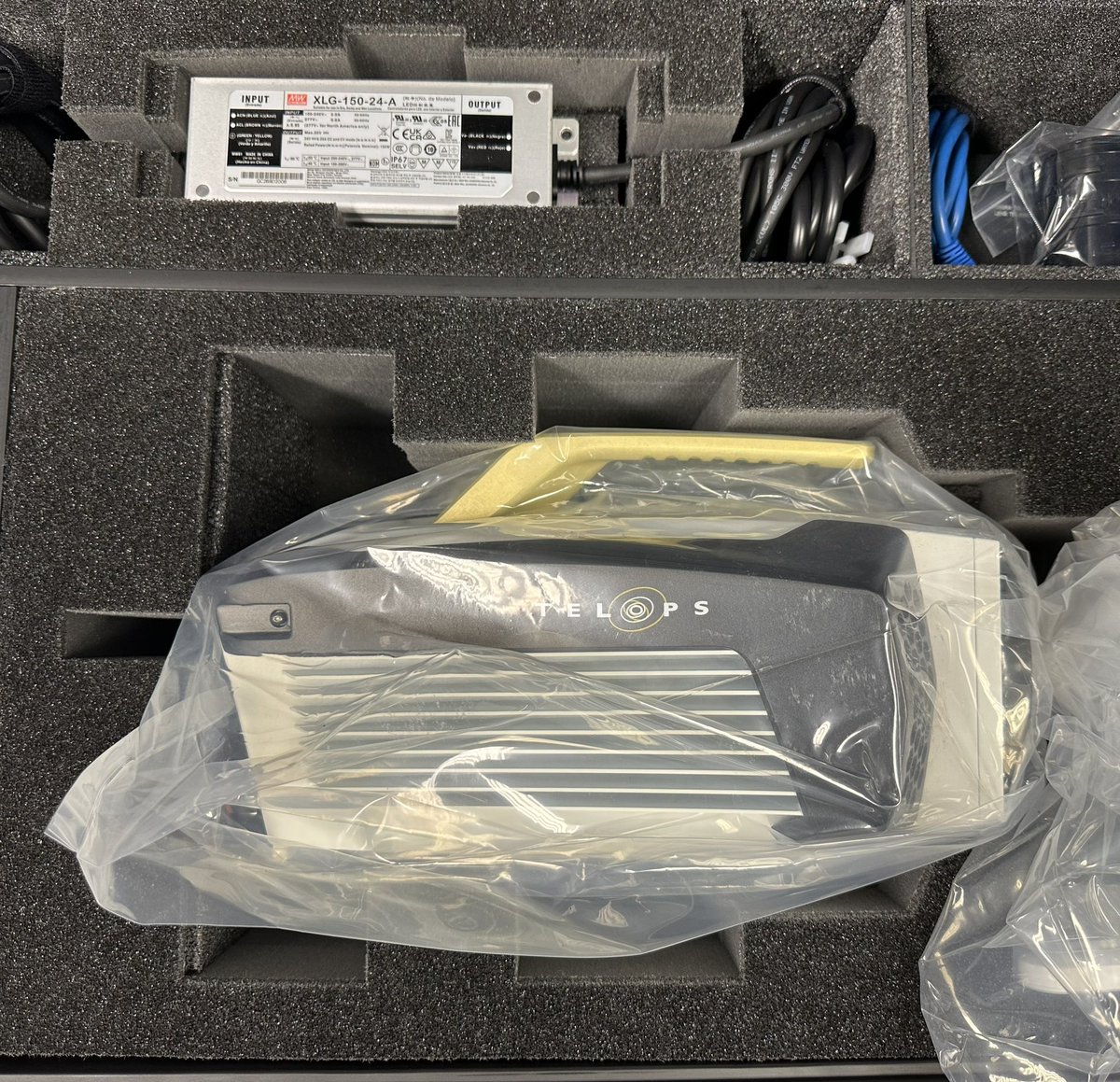
Exciting Friday delivery from @telops for the hypersonic lab
Nbd just the fastest thermal imaging camera on the market

9
65
6,642




20 Mar 2024
#TGI
@telops new HDR M700 thermal imaging system with dramatic increase in dynamic range and saturation management capability configured for highly contrasted scenes commonly found in military signature and ranging measurements, additive manufacturing research & combustion. 1/2

3
5
12
602

15 Mar 2024
【#Soliloquy about Japanese #diet LIVE.&#life】
👋"(^=>O<=^)"m"
:
#国会中継 をnで見ていたが全くつまらないというより、くだらない😑ので、netで他の #LIVE配信 へ移動‥
「#ニコ動」。
😱‥まぁ華やかなtelopsが画面を覆い尽くしており、稀にしか全画面見れない。賑やか❗️
但、寝ている議員の指摘やその名前やら、その周辺情報やら、わけの解らない意味深な言葉やらが機関銃の #Tracer の如く飛び交うので読むの大変!💧
この辺りまだまだ自由な国、日本。ナワリヌイ氏の奥様が死を賭してaccount配信していらっしゃるpostをfollowしているが、比較にならない。
しかし‥この書き込みしてる子ら、って投票🗳️してるんだろうか¿
どうもそこら辺聴いてみたい。🤔
じゃないと「単なる若者のガス抜き手段」
として機能しかねない。
結局この醜悪な現体制を、より強固に支え続ける手段として、優れて有効に機能することになる‥⁉︎よね。
【end】
ねぇ‥まるさん❣️♥️✨^^
※今は声を消して‥テロップの波と🌊と画面のみ眺めている‥
いたが、やはり「精神衛生上良くない👎」
ので消してうとうとnow。。。
"Time is money❣️"
でっせ❣️
基本的には、政権闘争は命懸け。
野党の追及は甘々。党内議論映す必要無し。
#蓮舫•#山本太郎•#泉房穂•#福島瑞穂 氏位の切迫感ないと‥舐められてんで。あんたら
1
1
2
226

8 Feb 2024
Join @Telops & @photonetc for a virtual event From Earth to Sky: Advancing #Mining through #Hyperspectral Excellence.
Learn how #hyperspectralimaging can help for mineral identification. Register here: tinyurl.com/yc2jpxnd
2
130

30 Jan 2024
Photonics West Booth 3273
Visit us Photonics West - Booth 3273 to experience the unparalleled sensitivity and resolution of Photonis’ Single Photon detection and imaging devices.
#Photonis #Telops #Xenics #innovation #SPIE #Exosens
28 Jan 2024

Photonics West - Booth 3273
This weekend we attended the SPIE BiOS exhibition in San Francisco, and we're delighted to share it with you! We look forward to seeing you on Tuesday January 30 from 10 a.m. at our Photonics West booth.
#Photonis #Telops #Xenics #innovation #SPIE

2
3
62