
github.com/britcruise9/GrowB…
I have been asked a lot lately about entry-level robots, and normally point people to TurtleBot or Husarion.
This might be worth watching. It's early, but it's interesting.
2
50

Jun 11
i tried to implement it on my depth images to detect other objects (turtlebot here) and use the produced masks to correct the drift/calculate arp etc. Lets see where it takes me

22
Robot Operating System (ROS) retweeted

Just received 2 new Turtlebot 4 for the @RoboticaSw_URJC 🤓

3
3
37
2,178

7/ TurtleBot got iRobot Create (or Kobuki base) for the mobile base, Kinect for depth camera, and a netbook (or NUC) for compute.
Here's the full BOM if you're interested in building one at home:

1/ What's after AI?
Robots.
Let's build your own Personal AI Robot.
Open source. Hackable. For a few hundred dollars. 🧵
1
4
88
6/ TurtleBot, 2010
Created by @meloneewise and the Willow Garage team.
They were also the team behind ROS 🫶
This robot and ROS taught a generation of grad students and helped creating so many robotics companies.

1
4
79

May 17
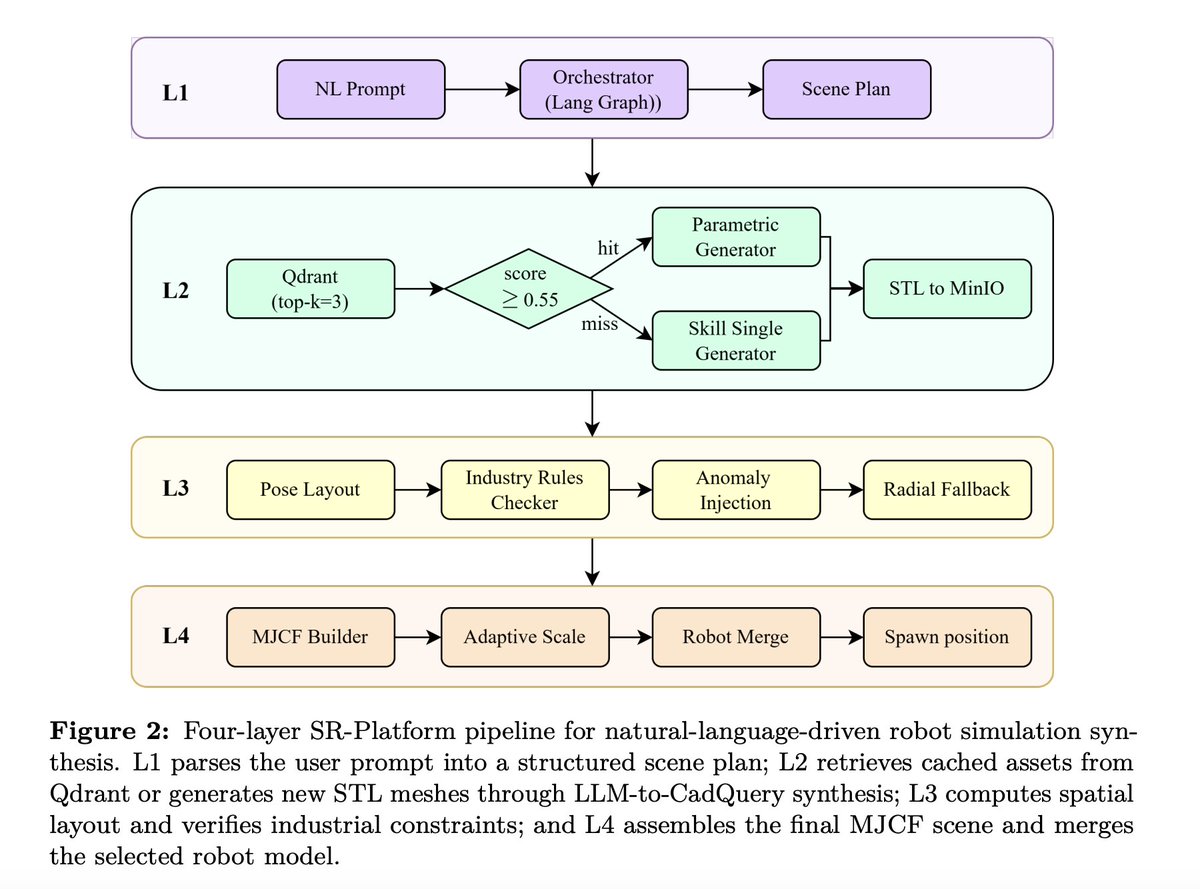
SR-Platform runs a 4-stage agentic pipeline — not one big LLM call.
Each layer does exactly one job:
L1> Orchestrator
Reads your natural language prompt. Outputs a structured JSON scene plan — room size, object list, robot type. Pure planning, no geometry yet.
L2> Asset Forge
For every object in the plan, it first searches a Qdrant vector DB for cached assets. Cache hit → reuse instantly. Cache miss → LLM synthesizes CadQuery code → renders to STL → stored for future reuse.
This is the slowest stage by design. Every new object costs an LLM call. Every cached one costs nothing.
L3> Layout Architect
Places objects in the scene with spatial reasoning — tables on floors, machines near walls, clearance from aisles. An #IndustryRulesChecker enforces real safety constraints: electrical clearance, fire egress, machinery safety distance.
L4> MJCF Bridge
Assembles the final MuJoCo XML. Merges your chosen robot (UR5, Franka Panda, TurtleBot...) at the right spawn position. Streams the result to the browser via MuJoCo WASM — no install required.
611 LLM calls measured over 30 days of production. Median end-to-end: ~50s. With cache hits: ~30–40s.
7
4
21
2,149


Are you working on open source software / hardware humanoids or humanoid hands?
We might organize a panel for IEEE Humanoids 2026 and we would love to chat.
What would the LeRobot / TurtleBot of humanoids look like?
1
2
18
2,088


Apr 28
2/ For context, SLAM on Mini Turtlebot 🐢 currently happens off board. But, in reality we don’t need heavy sampling of cloud point data to navigate and odometry is pretty straight forward
Shout out to @LuckySah22 for making progress on SLAM integration on to @rosorg RViz
3
14
1,285
Apr 28
1/ After attending the M5Stack Tour, I’m been thinking whether Mini Turtlebot 🐢should use an M5 CoreS3 instead of a traditional ESP32. My concern is power consumption
Also thinking about implementing “Mini SLAM” onboard - lightweight SLAM on ESP32.
Do you have any thoughts?
2
5
26
1,964

Apr 13
MAPFは静的環境を仮定してはいるが、CBFによる局所的衝突回避を組込んでいるから、ある程度であればスナップショット状況からズレても対応可能。なのでそれを活かすように絵を作る。最初は自分が動的障害物をやっていたが、後にラボに転がっていたTurtleBot群に役割を譲った
Apr 8

技術要素が揃ったところでひたすら練度を上げる作業が続く。このワークが偉いのは大規模デプロイから逃げていないこと。ソフトウェアスタックはほぼPython、プランナーはC 、ロボット間通信はROS2、あとmatplotlibで作ったデバッグ用GUIにめちゃ助けられた。かなりインタラクティブなものが作れる
1
3
17
7,525

Mar 25
Alona, you spot on 👌🏼
@konnex_world's cooking with that vision.
But here's what takes it to the next level:
@peaq's already making robots independent economic players today in 2026... it's the L1 built specifically for the Machine Economy.. giving machines self-sovereign IDs, verification tools, and direct on-chain payments so they can find jobs, prove results, and get paid on their own without humans babysitting.
𝗥𝗲𝗮𝗹 𝗲𝘅𝗮𝗺𝗽𝗹𝗲 𝗜’𝗺 𝗽𝗲𝗿𝘀𝗼𝗻𝗮𝗹𝗹𝘆 𝗶𝗻𝘃𝗲𝘀𝘁𝗲𝗱 𝗶𝗻:
- That tokenized robo-farm in Hong Kong(@DualMintRWA). I'm already earning monthly $USDT yields at ~18% APY from robots growing and selling fresh greens.
Machines literally paying their owners on-chain every month. No joke.
- #peaq's Robotics SDK lets any ROS2-compatible bot (Unitree, TurtleBot, etc.) get a Machine ID, authenticate, do delivery gigs or factory work, get paid into its own wallet, and even pay for charging... all on-chain.
𝗧𝗵𝗲 𝗲𝗰𝗼𝘀𝘆𝘀𝘁𝗲𝗺 𝗶𝘀 𝘀𝘁𝗮𝗰𝗸𝗲𝗱 𝘄𝗶𝘁𝗵 𝗹𝗶𝘃𝗲 𝗗𝗲𝗣𝗜𝗡𝘀 𝗽𝗼𝘄𝗲𝗿𝗶𝗻𝗴 𝘁𝗵𝗶𝘀:
- @xmaquina.. tokenizing humanoid robotics infrastructure on peaq's foundation.
- @MastChain_DePIN.. ships and maritime data verified and transacting live.
Konnex = marketplace
peaq = infrastructure layer
Together?
trust me, they will unlock that $25T physical economy. ⚡
Mar 24

Most robots can do real work.
But they cannot find jobs, prove results, or get paid on their own. They depend on closed systems and people in the middle. This slows everything down and makes trust a problem.
@konnex_world solves this.
Here's what it will look like
A user submits a task.
AI chooses how to complete it.
A robot performs the work in the real world.
The system checks the result using clear data.
If the work is done right, payment is released.
No central control. No need to trust someone’s word.
The result speaks for itself. Konnex turns physical work into something that can be verified and paid for on-chain. It gives robots a simple way to take jobs and earn from the work they do.

3
3
27
855

Mar 12
ポイントは人間のデモンストレーションからロボット群が直接学べるようになった点だ。
arXivで発表された新研究「Generative Adversarial Imitation Learning(GAIL)ベースのロボット群模倣学習フレームワーク」。マット・クラウス氏とヨナス・ククリング氏が主導し、人間のデモやPPO訓練ポリシーからロボットが行動を抽出する仕組みだ。
6つのミッションで評価され、デモに匹敵する性能を示した。さらにTurtleBot 4の実機群でシミュレーション同等の結果を出した。
従来の模倣学習は単独ロボット向けが多く、群制御は報酬設計が複雑で手間がかかる。
このニュース、実はロボット工学の模倣学習ブームのど真ん中だ。
直近の関連arXiv論文を見ると、HoMMI(人間デモから全身モバイルマニピュレーション学習)やRoboPaint(人間デモを任意ロボットに変換)など、デモ活用の動きが加速中。
VPWEMのような長期記憶ポリシーも並行して進化してる。背景は大規模デモデータの蓄積と、GAILのような生成対抗ネットワークの洗練。
これでロボット群が人間の動きを「見て真似る」だけになり、専門家による手動報酬設計のボトルネックが解消される。
俯瞰すると、点の積み重ねで業界の潮流が見える。
単独から群へ、シミュから実機へのSim2Realが安定化し、現場導入のハードルが下がる流れだ。
私が見る限り、勝負を分けるのは実環境でのスケーラビリティ。ここを押さえたプレイヤーが群ロボット市場の総取りをする。

4
148

Mar 4
Thanks! It's small. I use this turtlebot chassis from @dfrobotcn and a #Radxa x86 computer and a @RealSenseai D415 stereo camera - dfrobot.com/product-65.html
1
2
81

Mar 3
OpenMind OM1 is an open-source operating system for intelligent robots, developed by OpenMind (USA) since 2024. OM1 is considered the "Android of robotics" – a hardware-agnostic platform that allows running various types of robots: from humanoids and quadrupeds to educational TurtleBot, and even mobile and web applications. **Key features of OM1:** - Easy integration with large AI models (LLMs) such as GPT-4o, Gemini, Claude, DeepSeek, or local models via Ollama. - Multimodal processing: receiving data from cameras, LiDAR, microphones, the web, X/Twitter, etc., and making decisions to enable the robot to speak naturally, move, explore the house, and even help children with math. - Modular architecture in Python, easily scalable, plugins for ROS2, support for both cloud and on-device. - Combined with the FABRIC protocol for robots to authenticate identity and share knowledge with each other, aiming towards a "social network" for machines. The goal of OM1 is to transform robots into useful everyday devices, easily upgradeable through apps (similar to the App Store for robots), without changing hardware. The project launched beta in 2025, has been well-received by the robotics community, and is available on GitHub: github.com/OpenMind/OM1. In the near future, OM1 promises to help robots no longer be limited by manufacturers, but become an open platform for everyone to create and implement practical physical AI.

2
28

Mar 2
Universities/Education: Real practice without hardware with @PrismaXai
Robotics and AI students no longer need their own $50k robot. PrismaX provides access to real equipment without million-dollar purchases or logistics nightmares.
Why traditional education slows progress
In a typical university, robotics looks like this: one Unitree G1 for $16k per department, plus a 2018 TurtleBot that constantly breaks.
A fleet of 6 different robots? Forget it – that's hundreds of thousands of dollars not in the budget.
Students spend 80% of the semester not on code and models, but on assembly, calibration, and repairs. One robot for 20 people means a 10-minute practice queue. Simulators like Gazebo teach theory but not real surprises: fabric doesn't slide by simulation physics, lighting confuses cameras, floors are uneven.
Result: Graduates know physics and math but get lost with actual hardware. Companies spend months "retraining" them.
How PrismaX changes the game
PrismaX provides a full fleet of 6 robots via time slots starting at $5/min. No purchases, deliveries, or workshops needed. Students log into gateway.prismax.ai from their laptop and control a real machine in a data center within 5 minutes.
1⃣ Robotics 101 (Intro course)
Unitree G1 or Ubtech Walker. Students master kinematics, balance, basic motions.
Picture this: 15 students, 20 minutes each – everyone leaves knowing "humanoid walk."
2⃣ Manipulation
Reachy 2 or Boardwalk Alex. Task: fold a shirt or move a crate. Students feel plastic vs glass differences, learn force control on real grips.
This isn't theory, it's data they later fine-tune into models.
3⃣ Mobile robotics
Unitree Go2-W on stairs and gravel. SLAM, terrain navigation, obstacle avoidance.
Students tackle "terrain challenges" – best solutions go straight into portfolios for Google or Boston Dynamics.
4⃣ Social robotics
Mirokai as "hotel receptionist." Students learn non-scary gestures: smooth head turns, friendly pointing. Here it's not just mechanics but interaction psychology.
The real revolution
PrismaX isn't just cheaper hardware access - it's the future of robotics education. Students don't graduate with theory and frustration anymore. They leave with battle-tested hardware skills, real datasets, and portfolios that scream "production-ready."
This closes the academia-industry gap overnight. Companies stop wasting months on retraining. Next decade's robotics leaders aren't just trained – they're forged on real machines.
Don't let your students queue for sims.
PrismaX turns theory into tomorrow's engineers.
The robotics revolution starts in your classroom.
2
6
83