
The Unified Map Fallacy: Why Shared Information Does Not Guarantee Collective Navigation
DOI: doi.org/10.5281/zenodo.20647…
We often assume that if everyone can see the same map, the system will act more rationally.
But shared information is not the same as shared movement.
A government can publish reports and still fail to repair infrastructure.
An institution can run reviews and still block correction.
An AI system can summarize the problem and still fail to integrate the lesson.
A public can see the cliff, model the cliff, debate the cliff — and still keep moving toward it.
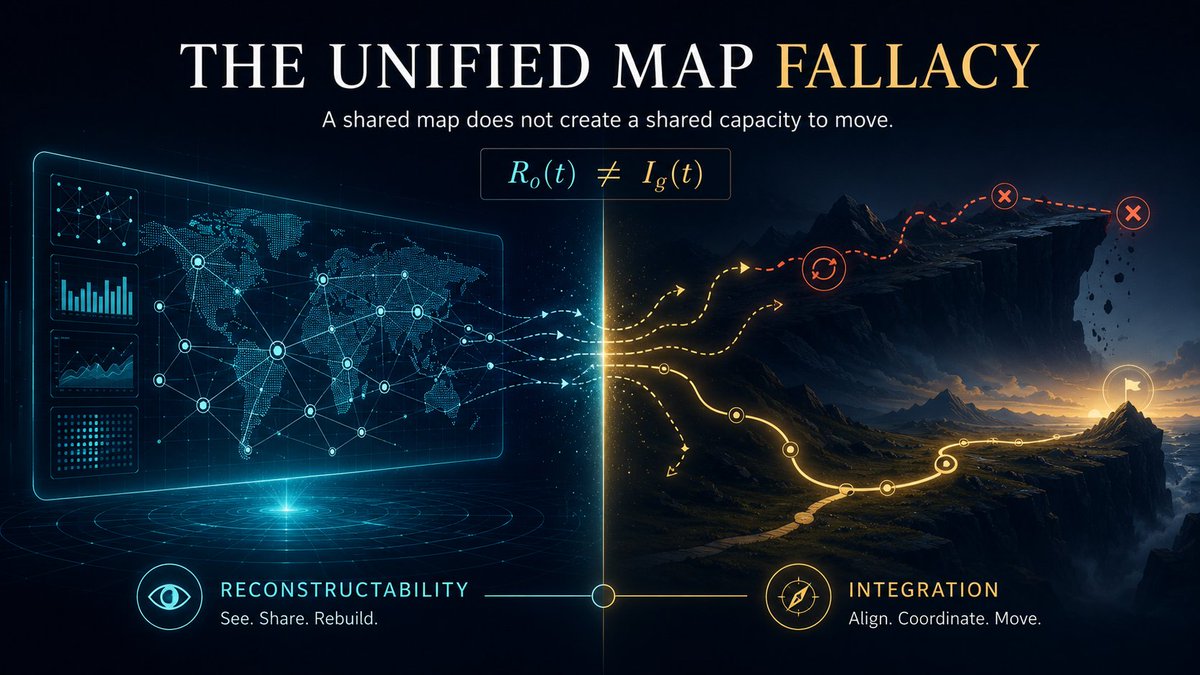
This paper introduces the Unified Map Fallacy: the mistake of confusing reconstructability with integration.
In Accessibility Geometry terms:
R_o(t) ≠ I_g(t)
Reconstructability is the ability to recover or model what is happening.
Integration is the ability to absorb that information into future-state navigation and actually change trajectory.
The paper also introduces the Zeno Condition — a warning pattern where a system repeatedly reconstructs failure without completing the adaptive step into corrective movement.
And it introduces Verification Homeostasis: the usable information band between scarcity and saturation. Too little information creates dependency. Too much unstructured information creates overload. Navigation requires information that is available, structured, trustworthy, auditable, routed, and integrable.
This is not an argument against maps, dashboards, open data, prediction markets, ledgers, AI systems, or warning tools.
It is a boundary statement:
A dashboard is not a repair.
A forecast is not a route.
A ledger is not legitimacy.
An AI synthesis is not adaptive governance.
A warning is not safe route control.
A shared map does not create a shared capacity to move.
#AccessibilityGeometry #UnifiedMapFallacy #VerificationHomeostasis #ZenoCondition #SystemsTheory #Cybernetics #AIGovernance #OpenData #PredictionMarkets #InstitutionalDesign #CoherenceDynamicsLaboratory
1
20