

IDONT CARE THAT IM REUSING PICTURES. it’s rare that i take pics of myself..
9

I'm so happy that she's reusing her P4D design because it's SO cool omg. I love the LED bubbles. 💙💙💙
238

26m
I think theyre just reusing a model but ig im not surprised by anything anymore. They got their own timeline wrong at least once before lol
3
39


Without reusing a stadium, USA could host the World Cup for 10 Cups in a row before having to use High School Stadiums(Which are still massive in places like Texas)

One of the most incredible aspects of the World Cup in the United States is what we DIDN’T have to do to prepare for it.
Qatar built multiple brand new stadiums, a metro system, roads, hotels, and entire districts.
South Africa built new stadiums, parking, etc.
Brazil spent billions on stadium and transit projects.
Russia built and rebuilt venues across the country.
Meanwhile, the U.S. was like: “We’re good.”
Like, we modified the playing surface in some stadiums and that was it.
The sport venue infrastructure in the US mogs every other country on earth and it’s not even close.
1
26

Injection site soreness from BPC? Once or multiple times? You reusing the same needle over and over again 😂😂
56

if the worst thing is him reusing the Michelle Obama line I can live with it, him vs Volkov for a number one contenders fight would be a banger
1
108
Faggot Jackass retweeted

51m
How it feels reusing old dates you’ve done with someone else with someone new 😛🧅
1
3

Dude, like simply from a business and world design standpoint, what even would be wrong with reusing assets for a direct sequel to a game?? Business wise it saves time and money for a new game to come sooner and world wise, it's still Japan. Why wouldn't parts of it be similar??
1
10
zay retweeted

Jun 14
Silver reusing the same “Spurs blow a 4Q lead” script every game
 gio🇵🇸
gio🇵🇸
6
428
12,453
153,521

WINTER❄ retweeted

oughh it could either be a descendent of Herb or illumination being lazy again and reusing his model



3
5
130
2,277

Context is important. Social medias are the ones blocking posts, because they refuse to compensate those medias for reusing their articles for free. In Australia, Meta and others actually agreed to compensate the medias. Here, Meta refused.
9

Guess i have to lay on the good ol
Reusing anims, damn you guys
1
627
Lil_soja(the-soja) retweeted

I hate this stupid gibberish, put under videos like this to avoid getting caught for reusing content
 SPACE
SPACE
58
468
20,790
259,614

1/
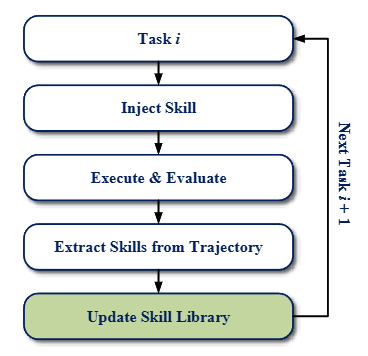
Many recent works study self-evolving agents with skills.
We believe the key value of self-evolution is generalization: agents should extract skills from experience and adapt across tasks by reusing them.
Compared with offline settings, where skill libraries are pre-built from a "training" set, online learning is more challenging and realistic: the agent must extract and reuse skills using only the test tasks.
Therefore, following prior works, we strictly formulate online skill learning: given a task stream and an initially empty skill library, the agent extracts skills from its own trajectories on the fly and reuses them on subsequent tasks.
In our paper, we further restrict the agent from accessing ground-truth signals from environments after finishing each task, leaving trajectory evaluation and skill verification to the agent itself.
1
14

The difference is SpaceX has a plan to create new rockets and keep improving. NASA was reusing the same shuttles to the point that they were falling out of the sky because that is just how government operates.
1
20