
Robotics Research Intern @NvidiaAI; Robot Learning PhD student @UMRobotics; undergrad @imperialcollege
Joined April 2023
- Tweets 137
- Following 341
- Followers 143
- Likes 1,829
21 Photos and videos











Pinned Tweet

Mar 3
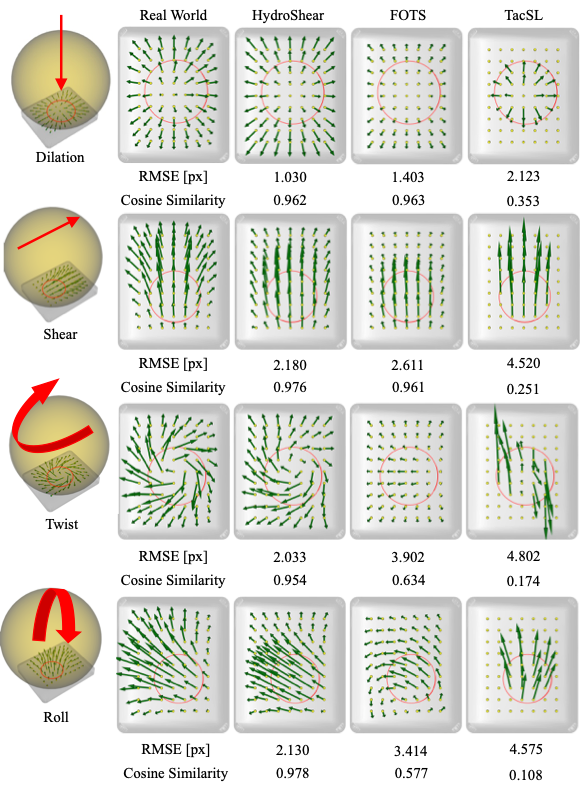
Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
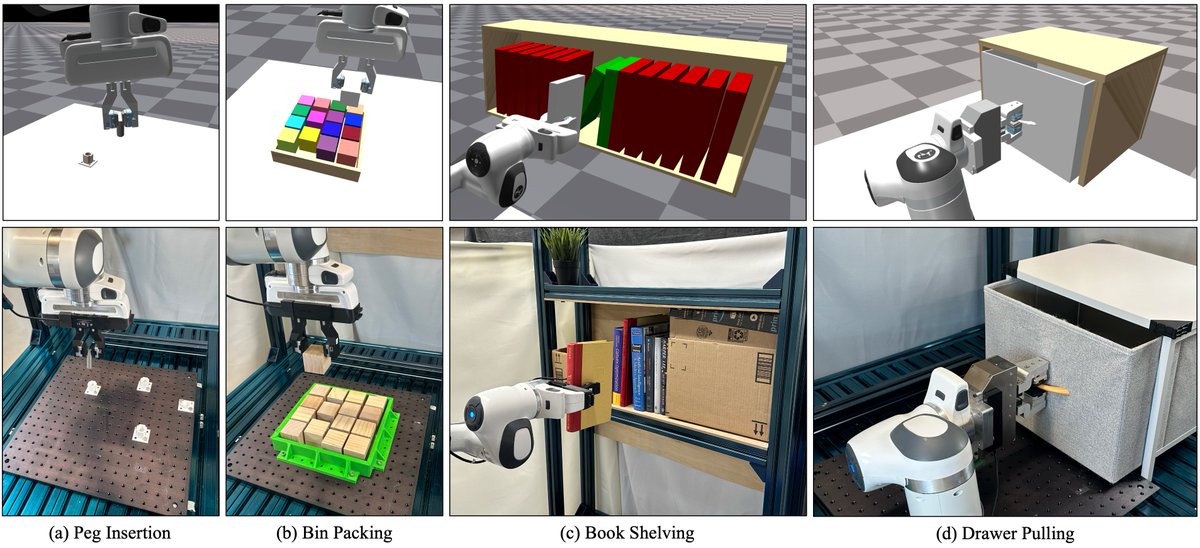
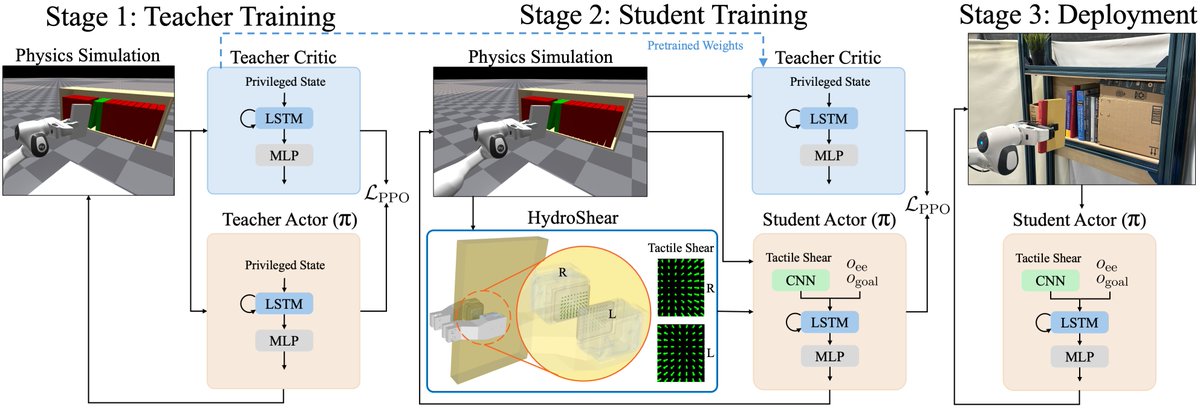
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: hydroshear.github.io
Robot videos in 1x 🧵👇
4
13
92
17,654
Jayjun Lee retweeted

Jun 7
One of the bitter lessons in computer vision is the false assumption that solving all the intermediate representations—segmentation, 3D meshes, depth, etc.—is needed to make a computer understand the scene.
In the end, it is the final policy that takes action that matters.

Bill Freeman gives us first a list of warm-up bitter lessons. He keeps the bigger ones for later in the talk. #cvpr2026

17
14
156
21,091

May 1
🥳HydroShear got accepted to RSS 2026! Looking forward to the Vitruvian kangaroo t-shirt!
We've open-sourced our code for tactile sim-to-real RL:
github.com/MMintLab/hydroshe…
Mar 3

Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: hydroshear.github.io
Robot videos in 1x 🧵👇
1
8
66
9,150
Mar 27
Come participate in the RoboMME challenge @CVPR 2026!!
Mar 26

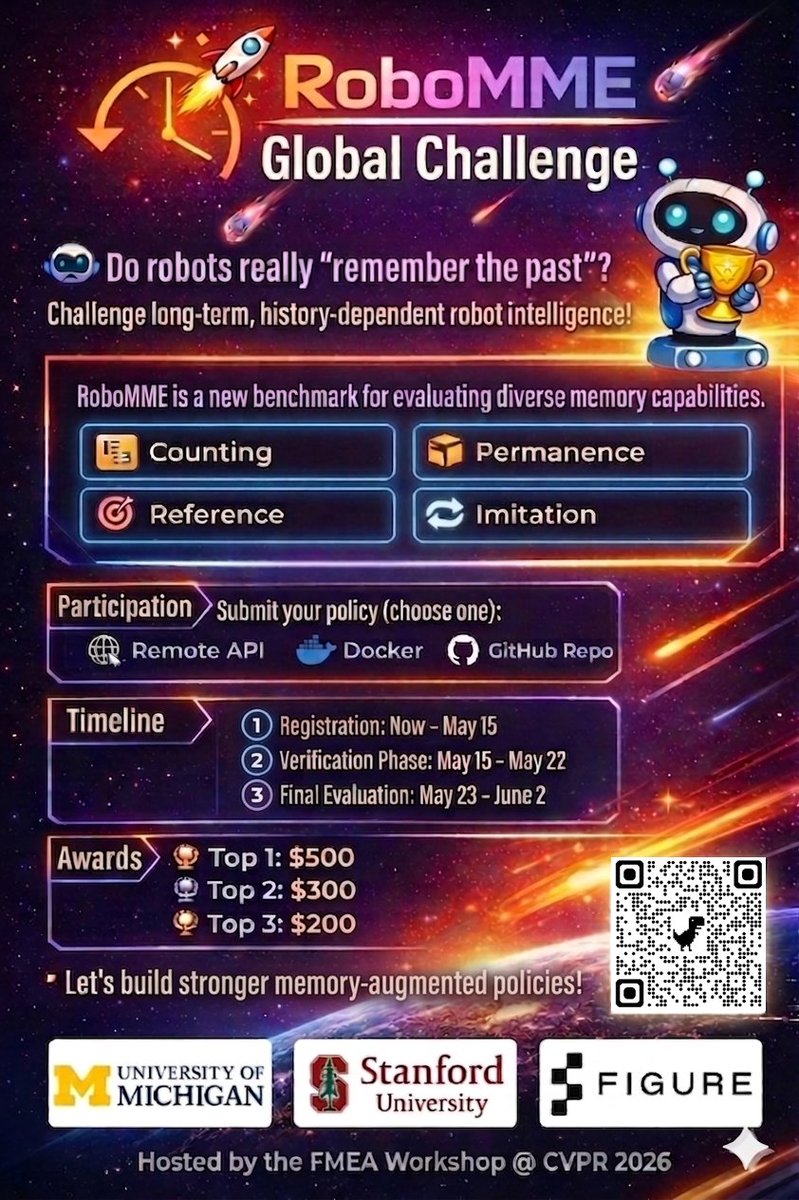
🚀 The RoboMME Challenge @ CVPR 2026 is now LIVE!
Timeline:
• May 15 — Policy submission
• June 3 — Winner announcement
🏆 Top 3 teams will be awarded $500/300/200
Let’s push the frontier for memory-augmented robotic manipulation together 💪
🔗robomme.github.io/challenge.…
4
9
1,125
Mar 9
Excited to share our new robot learning sim benchmark RoboMME with a wide range of non-Markovian tasks specifically designed to evaluate different forms of memory for manipulation policies!
robomme.github.io
Mar 9
Robot memory methods are growing fast, but systematic evaluation is largely lacking. 📉
Introducing RoboMME: a new benchmark for memory-augmented robotic manipulation! 🤖🧠
Featuring 16 tasks across temporal, spatial, object, and procedural memory
🔗 robomme.github.io
1
1
12
1,299
Jayjun Lee retweeted

high fidelity tactile simulation with shear(!!) to train sim-to-real RL policies
years ago I was less bullish on tactile simulation so we doubled down on SSL with just real data to build Sparsh models
now we can revist co-training on sim real data
Mar 3
Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: hydroshear.github.io
Robot videos in 1x 🧵👇
5
28
3,917
Mar 3
Has visual fidelity outpaced dynamic fidelity in tactile simulation for sim-to-real transfer of policies?
Introducing HydroShear 🏄♂️ : a hydroelastic tactile shear simulation for training zero-shot sim-to-real tactile policies in contact-rich tasks where fingertip force and shear matter most!
Webpage: hydroshear.github.io
Robot videos in 1x 🧵👇
4
13
92
17,654
Mar 3
For more details and videos, check out our webpage and the paper!
Webpage: hydroshear.github.io
ArXiv: arxiv.org/abs/2603.00446
1
7
288
Mar 3
Thanks to my awesome co-lead @dangan1693 and all the amazing guidance and support from our team @mukadammh, Alice Wu, Bernadette Bucher, Manikantan Nambi, and @NimaFazeli7!
@amazon @UMRobotics
7
266
27 Sep 2025
I’m co-organizing the H2R workshop and we’re starting soon! Come join our session in Room E3.
sites.google.com/view/h2r-co…
22 Sep 2025

T-5 to CoRL'25! 🇰🇷🤖
Join us on Sep 27th for the 1st Human to Robot (H2R) workshop, where we discuss the future of sensorizing, modeling, and (robot) learning from humans.
sites.google.com/view/h2r-co…

5
959
14 Aug 2025
Thanks @_akhaliq for posting our work! And I'm happy to share that AimBot 🎯 is accepted to CoRL 2025 @corl_conf! See you in Seoul!
Project webpage: aimbot-reticle.github.io/
Thanks to my amazing co-lead @YinpeiD, co-authors, and our advisors @NimaFazeli7, @SLED_AI

AimBot
A Simple Auxiliary Visual Cue to Enhance Spatial Awareness of Visuomotor Policies
2
3
23
3,198
Jayjun Lee retweeted

14 Aug 2025
Thanks @_akhaliq for sharing our work!
The core takeaway from AimBot is straightforward: explicit spatial cues (as shooting lines & scope reticles) are strong 2.5D augmentations that enhance the spatial grounding of any VLA models. These cues are interpretable and also strengthen proprioceptive state encoding.
To appear in #CoRL2025 @corl_conf.
Find out more here -> aimbot-reticle.github.io/
AimBot
A Simple Auxiliary Visual Cue to Enhance Spatial Awareness of Visuomotor Policies
1
5
43
11,925
22 Jun 2025
Just gave my first oral presentation today in Manipulation I session at RSS! Come check out my poster at #6 too!
21 Jun 2025
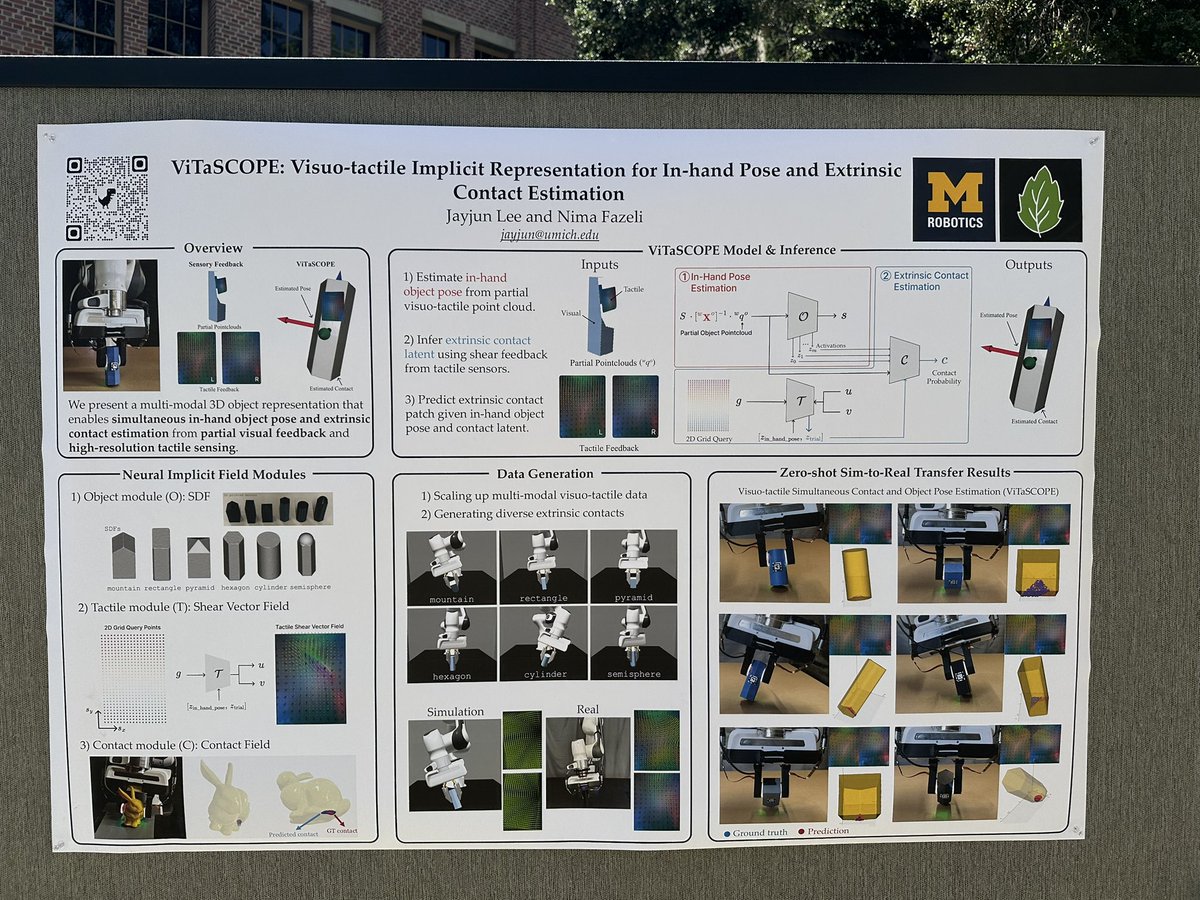
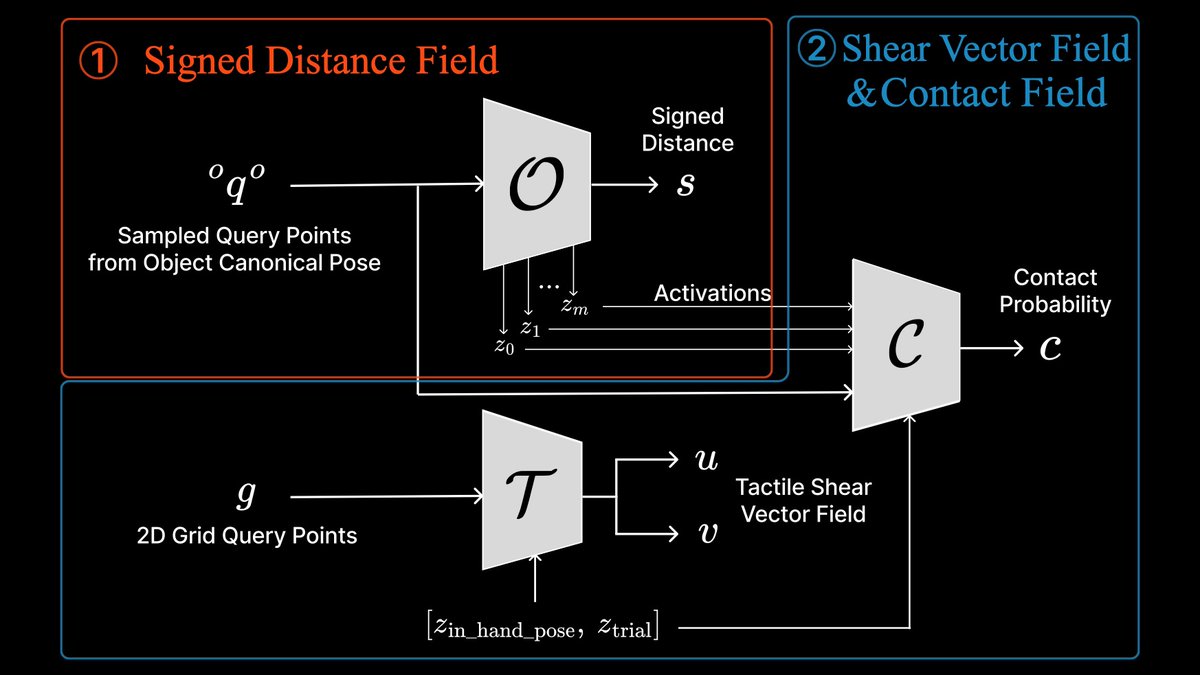
How can robots feel and localize extrinsic contacts through both vision👀and touch🖐️? #RSS2025 @RoboticsSciSys
Introducing ViTaSCOPE: a sim-to-real visuo-tactile neural implicit representation for in-hand object pose and extrinsic contact estimation!
jayjunlee.github.io/vitascop…
1
16
1,290