
Joined December 2014
- Tweets 299
- Following 122
- Followers 3,000
- Likes 145
169 Photos and videos














Ken Glodberg’s talk happening now at the Workshop on Semantics for Reliable Robot Autonomy: From Environment Understanding and Reasoning to Safe Interaction at VIP lounge C #ICRA 2026
5
545
Learning Systems and Robotics Lab (is hiring!) retweeted
#ICRA 2026 in Vienna is a blast! Here's our robot #autonomously participating in the robot parade!
Check out the our #SICNav-Diffusion crowd navigation method running on the robot (published in RA-L): sepehr.fyi/projects/sicnav_d…
@florian_shkurti @angelaschoellig
2
3
443
gym-pybullet-drones hit 2K stars!⭐We're building a new simulator with GPU support, differrentiable physics & sim2real. To help us prioritize exactly what the community needs, please take a moment to answer this quick survey: forms.gle/KasfQ7N4q3uM5yQr7
187
New Call for relAI MSc Scholarship Applications!🎓
🗓️Deadline: 15 June 2026
👩🎓Target Group: Top-tier (international) Bachelor graduates in CS, Math, Engineering, ...
🔗Details: zuseschoolrelai.de/applicati…
We are happy to supervise accepted students!
@angelaschoellig @TU_Muenchen
1
4
584
Learning Systems and Robotics Lab (is hiring!) retweeted
Our work, "A Primer on SO(3) Action Representations in Deep Reinforcement Learning," was accepted to #ICLR2026! We provide a systematic study of action representation choices in RL, showing that they fundamentally impact training stability and performance.
#Robotics #AI #RL
3
52
472
49,633
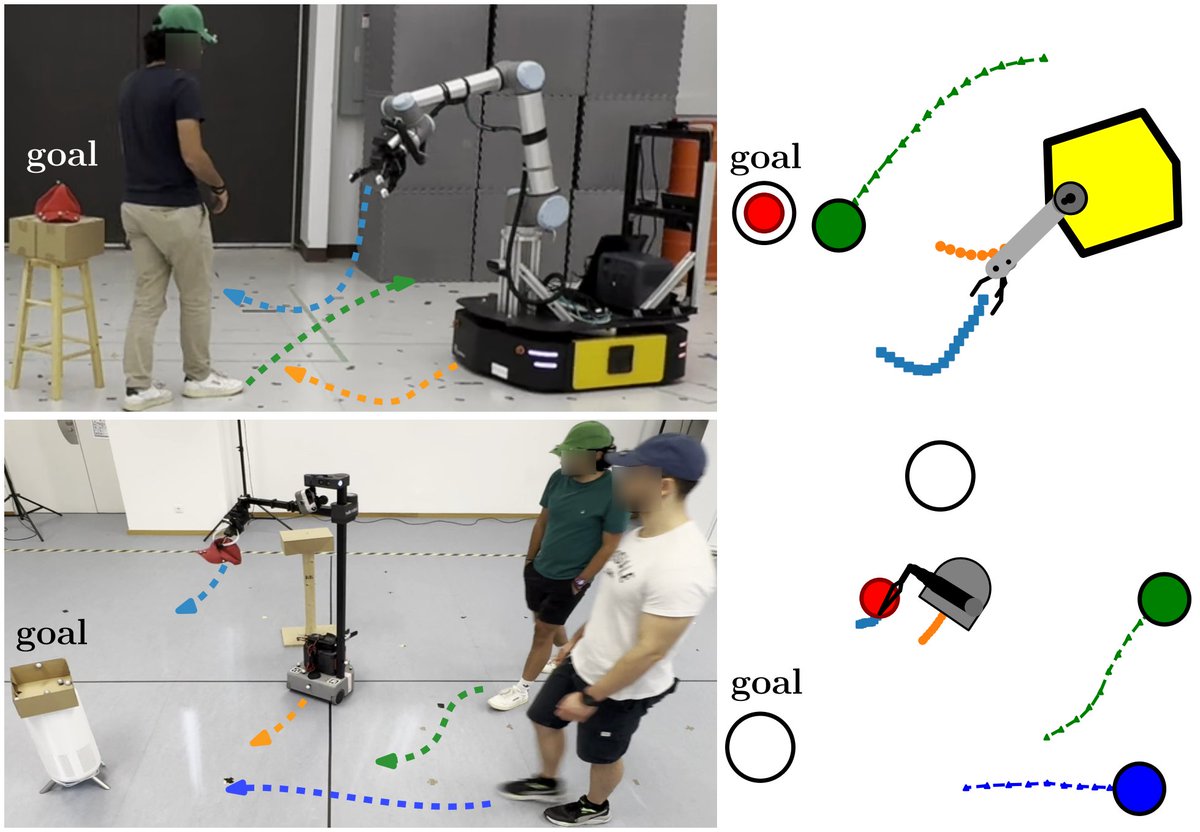
We have two papers accepted at #ICRA2026!
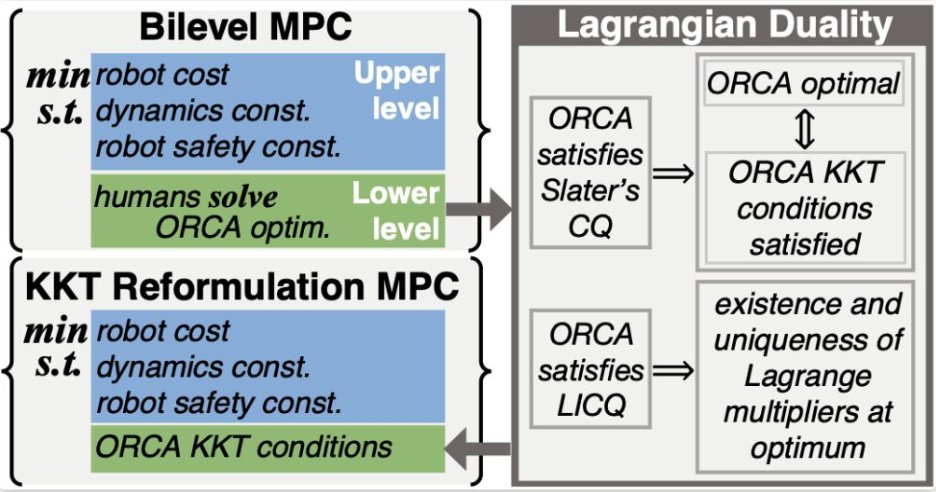
- SM2ITH: Safe Mobile Manipulation with Interactive Human Prediction via Task-Hierarchical Bilevel Model Predictive Control
- Path-Consistent Safety Filtering for Diffusion Policies
@angelaschoellig @TU_Muenchen @TUM_MIRMI
1
4
509
SM2ITH: Safe Mobile Manipulation with Interactive Human Prediction via Task-Hierarchical Bilevel Model Predictive Control
Paper: arxiv.org/abs/2511.17798
Video: youtube.com/watch?v=ld-Iyxqk…
1
3
366
From Demonstrations to Safe Deployment: Path-Consistent Safety Filtering for Diffusion Policies
Paper: arxiv.org/abs/2511.06385
Website: tum-lsy.github.io/pacs/
4
301
ICYMI: We had a blast at #AAAI 2026 in Singapore last weekend presenting our @IeeeTro paper #SICNav: Safe and Interactive Crowd Navigation Using Bilevel MPC and Bilevel Optimization.
Paper, Code, Videos: sepehr.fyi/projects/sicnav

1
4
478
Learning Systems and Robotics Lab (is hiring!) retweeted

Jan 24
If you're at #AAAI 2026 this week and interested in Safe and Interactive Crowd Navigation, I'll present our
@IeeeTro paper #SICNav Sunday!
Session: Journal Track 10
Room: Opal 107
Time: 10:06-10:18
Paper, Code, Videos: sepehr.fyi/projects/sicnav
1
4
469
Happy Robotic Holidays from the LSY Lab! 🤖🎄
Simulation Domain Randomization = Robust Policies. In this video, we randomize:
📸Camera
🖼️Background
💡Lighting
Excited about Sim-to-Real? Come work with us!🚀
Created by Timo Class @OliHausdorfer
#Robotics #Sim2Real #AI
1
6
557
How do you teach robots to make good decisions in the real world? 🤖 We have developed a course series that bridges optimal control, MPC, and RL—down to hands-on robot implementations. Course materials are coming soon. Subscribe here for updates: groups.google.com/g/safe-rob…
2
8
511
We are excited to share our recent collaboration with @Bitcraze_se, showcasing how Bitcraze’s new Crazyflie Colour LED Deck adds a new dimension of expression to our SwarmGPT system for interactive drone choreography design. Hope you enjoy the video and happy holidays!
1
264
“Let’s start with a bang — big energy, right away.”
With SwarmGPT, anyone can describe the feeling of a performance in plain words.
Paper: ieeexplore.ieee.org/abstract…
Videos: youtube.com/playlist?list=PL…
Website: utiasdsl.github.io/swarm_GPT…
#SwarmRobotics #GenerativeAI #TechMeetsArt
1
368
Diffusion Policies and VLAs with Formal Safety Guarantees🛡️
We just released our new paper: “From Demonstrations to Safe Deployment: Path-Consistent Safety Filtering for Diffusion Policies”
📑Paper: arxiv.org/abs/2511.06385
🌐Website: tum-lsy.github.io/pacs
3
13
93
20,356
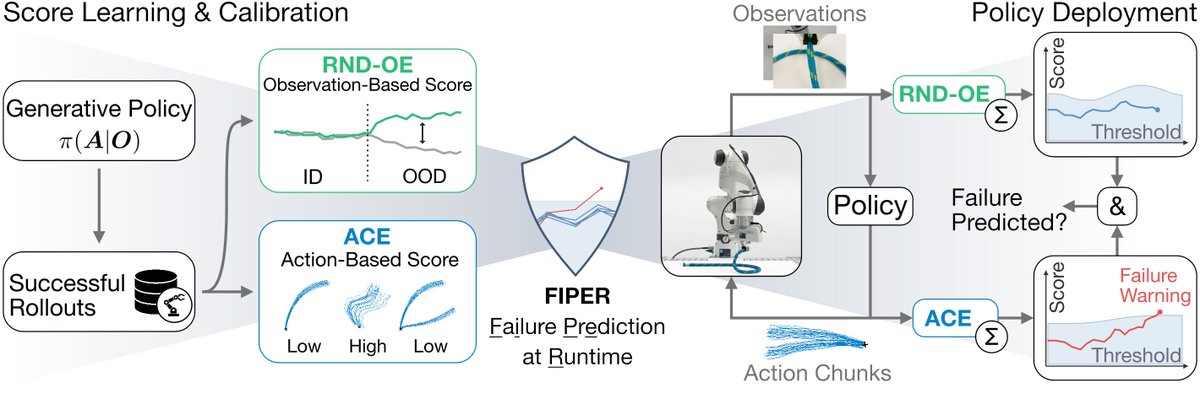
Our paper “Failure Prediction at Runtime for Generative Robot Policies” has been accepted to #NeurIPS 2025!
📄 arxiv.org/abs/2510.09459
🌐 tum-lsy.github.io/fiper_webs…
💻 github.com/utiasDSL/fiper
#Robotics #MachineLearning #AI #GenerativeAI #Safety
1
6
61
7,408
🚀Deploy VLAs & diffusion policies on real robots with 𝗖𝗥𝗜𝗦𝗣 – compliant ROS2 controllers for learning-based manipulation & teleoperation! Python, Gym and LeRobot interfaces, demo-ready. Paper & code: github.com/utiasDSL/crisp_co… #robotics #VLAs
3
438
Prof. Schoellig is giving a virtual seminar tomorrow, Aug. 26 (Tue) @ 13:00-14:30 (CEST) / 7:00-8:30 (EST) on "Aerial Swarms: From Safe Motion Planning to Language-Based Interaction."
Live stream: youtube.com/live/RtRyaqodld0…
@TU_Muenchen @TUM_MIRMI @UofT @UofTRobotics
1
2
398