
The Robotic Systems Lab designs machines, creates actuation principles, and builds up control technologies for autonomous operation in challenging environments.
Joined March 2016
- Tweets 695
- Following 172
- Followers 28,551
- Likes 588
354 Photos and videos
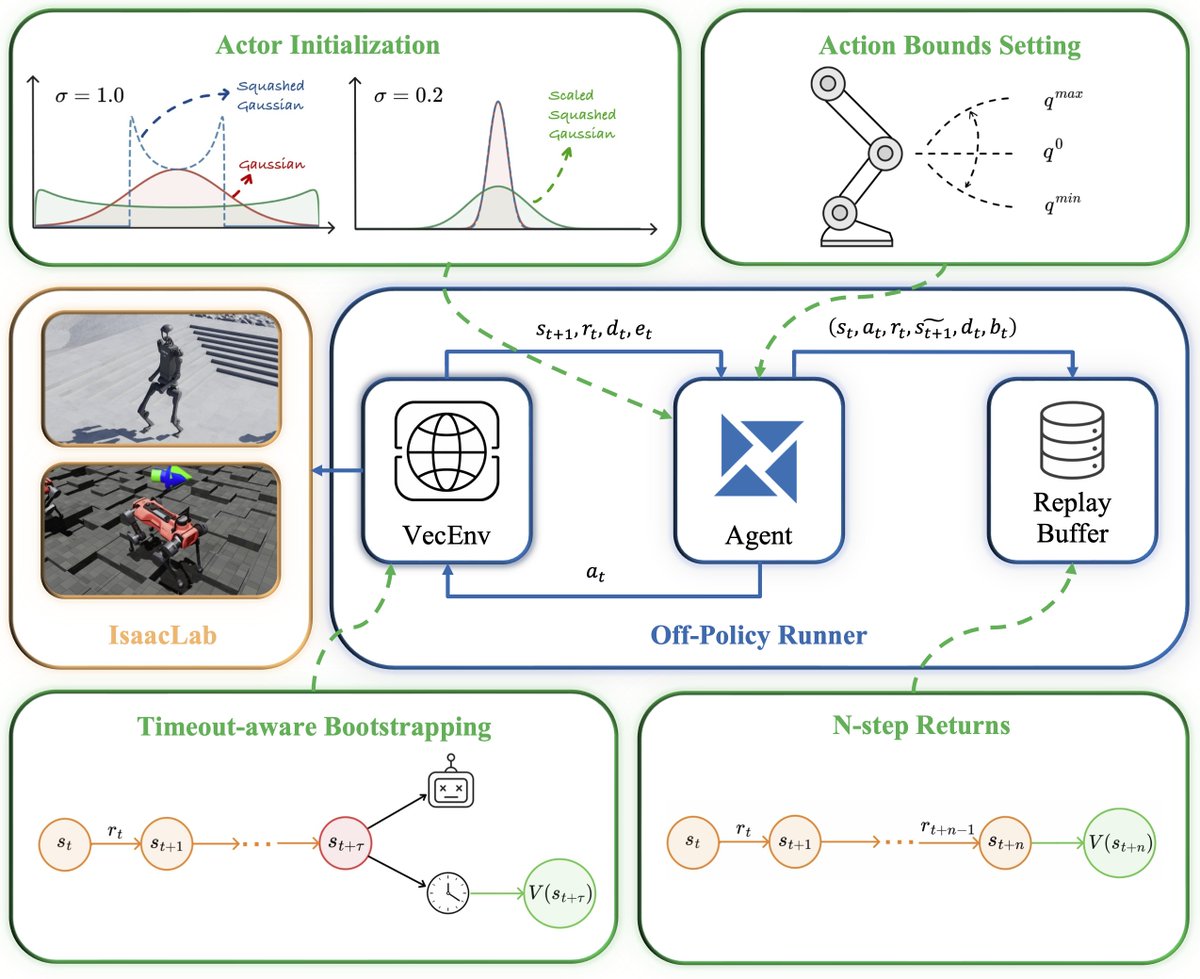
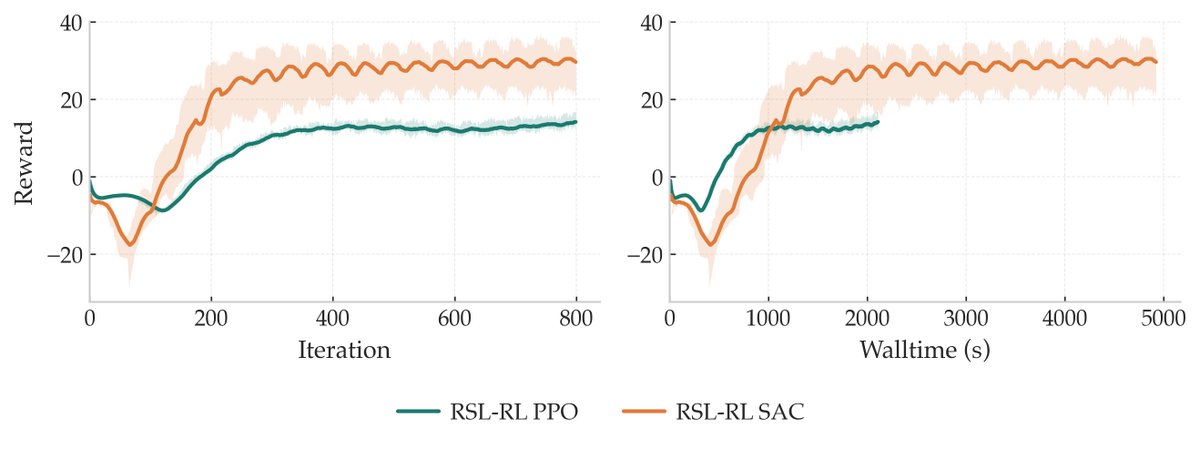
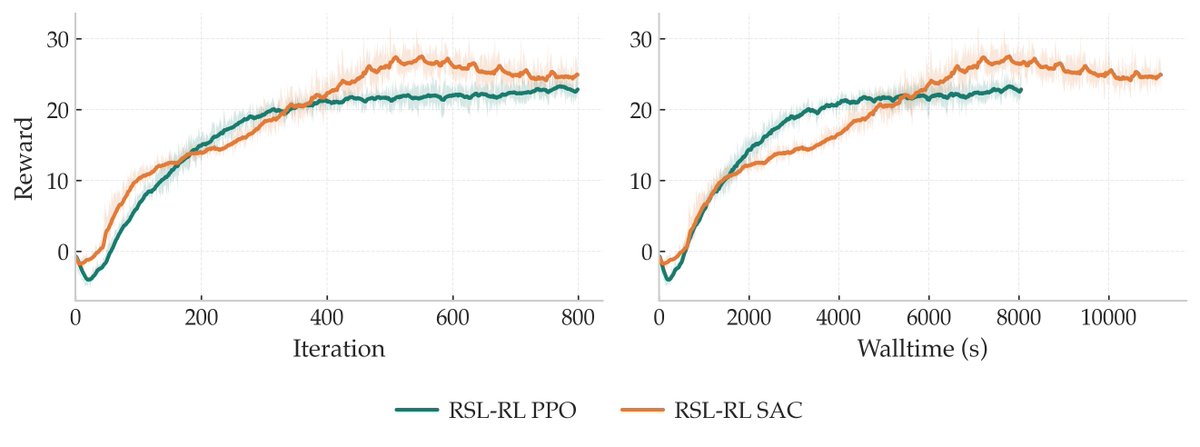












PPO has long dominated robot locomotion training in simulation. SAC, despite its sample efficiency, couldn't keep up.
We analyze why:
🔗sabagian.github.io/sac_relea…
🔥Integrated into RSL-RL, our approach requires only minimal changes, making SAC a drop-in alternative out of the box.
4
41
336
40,800
This project focuses on understanding the performance gap between PPO and SAC in massively parallel robot learning.
While efforts like FlashSAC @hojoon_ai and FastSAC @younggyoseo explore separate development, RSL-RL-SAC is made to stay close to the widely used RSL-RL codebase.
1
4
1,069
This project is led by Gianluca Sabatini, supported by Chenhao Li @breadli428 and Marco Hutter @leggedrobotics. We thank Clemens Schwarke's implementation insights.
Check out the paper!
arxiv.org/abs/2605.24975
6
851
We’re excited to be receiving one of these platforms for our research. Looking forward to exploring what we can build with it and contributing to the next wave of humanoid robotics.

NVIDIA announces the first open humanoid robot reference design built for robotics research.
The NVIDIA Isaac GR00T Reference Humanoid Robot combines the @UnitreeRobotics H2 humanoid robot, @SharpaRobotics Wave five-fingered hands for dexterous manipulation, Jetson Thor onboard compute, and Isaac GR00T open software and models, giving researchers a full-stack platform from data capture to model deployment.
Read the #NVIDIAGTC Taipei announcement: nvda.ws/4ef9VOr
2
3
42
6,549
Advancing dexterous manipulation through scalable visual sim-to-real transfer.
We are excited to share our RSS paper, “ViserDex: Visual Sim-to-Real for Robust Dexterous In-hand Reorientation.”
🌐 Project page: rffr.leggedrobotics.com/work…
1/N 🧵
6
19
195
39,556
4/N
This work highlights 3D Gaussian Splatting as a practical path toward scalable RGB-only dexterous manipulation.
For more details: arxiv.org/abs/2604.11138
This work was led by Arjun Bhardwaj (@ThougthShot )
2
6
1,848
3/N
Combined with curriculum-based reinforcement learning and teacher–student distillation, ViserDex enables real-world reorientation of diverse objects on a multi-fingered robotic hand, even under challenging lighting conditions.
3
766
2/N
ViserDex introduces a sim-to-real framework for RGB-based in-hand reorientation using 3D Gaussian Splatting. We perform domain randomization directly in the Gaussian representation space to generate photorealistic and diverse training data for robust object pose estimation.
5
864
🌎 World models can predict, but controlling real robots from imagination has long failed due to hallucination.
🤔 The missing piece? Knowing when the model is wrong!
🎯 Uncertainty-Aware Robotic World Model enables policy learning from offline data.
sites.google.com/view/uncert…
Jan 26

🌎Uncertainty-Aware Robotic World Model Makes Offline Model-Based Reinforcement Learning Work on Real Robots
👥Chenhao Li @breadli428, Andreas Krause, Marco Hutter @leggedrobotics
🎯Webpage:
sites.google.com/view/uncert…
📄Paper:
arxiv.org/abs/2504.16680
3
12
55
7,324

26 Nov 2025
🌎World models have been an exciting topic, but their promise has been challenging to translate into real-world robotic control.
🤔We want to understand what the missing piece is in our recent exploration with Robotic World Model.
🎯Project: sites.google.com/view/roboti…
26 Nov 2025
🌎Robotic World Model: A Neural Network Simulator for Robust Policy Optimization in Robotics
👥Chenhao Li @breadli428, Andreas Krause, Marco Hutter @leggedrobotics
🎯Webpage: sites.google.com/view/roboti…
📄Paper:
arxiv.org/abs/2501.10100
🗣️Oral presentation at EWM @NeurIPSConf.
1
14
60
18,194
23 Sep 2025
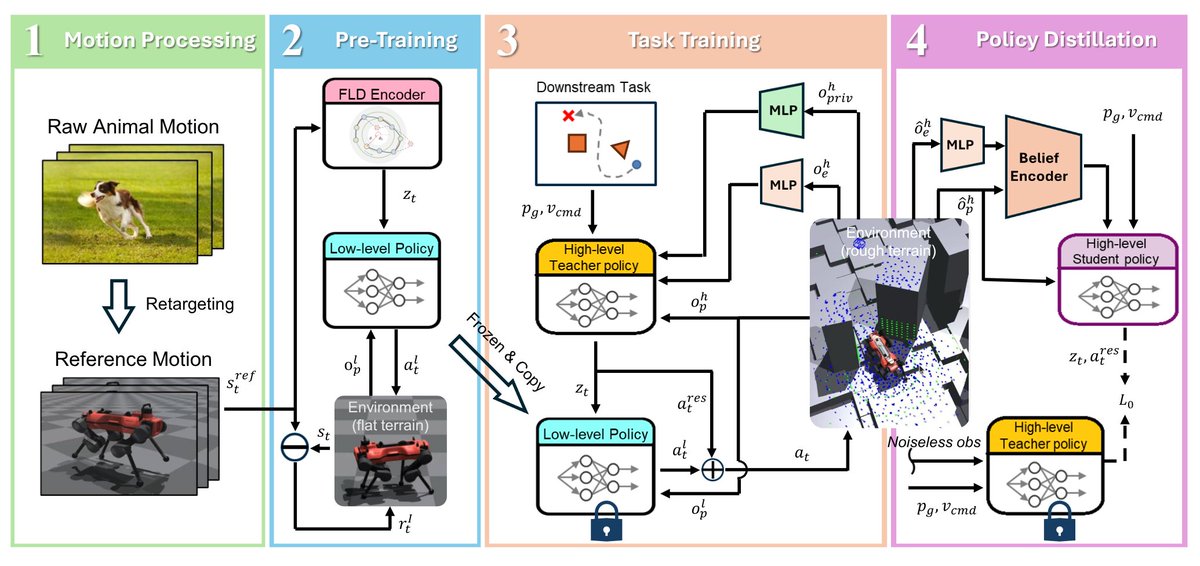
📢 Excited to share our latest work @corl_conf: Motion Priors Reimagined: Adapting Flat-Terrain Skills for Complex Quadruped Mobility! #CoRL2025
🐶Now ANYmal learns to walk (hop) from real dog motions!
📄Paper: arxiv.org/abs/2505.16084
🌐Project Website: anymalprior.github.io/
1
11
44
10,202
23 Sep 2025
On hardware, our controller preserves the style of the reference motions while adapting to uneven terrains and consistently reaches target points with a single goal input, reliably avoiding obstacles along the way.
1
6
1,739
23 Sep 2025
Motion Priors Reimagined is led by Zewei Zhang @ctki49, Chenhao Li @breadli428, Takahiro Miki @ki_ki_ki1, and Marco Hutter.
@ETH_AI_Center @eth_dmavt @ETH_en
2
1,599