
Robotics @GoogleDeepMind | Embodied intelligence and robot learning | Doctoral fellow @ETH_AI_Center, @leggedrobotics | Prev. @MIT, @ETH_en, @MPI_IS.
Joined December 2014
- Tweets 952
- Following 439
- Followers 6,928
- Likes 1,944
218 Photos and videos









Pinned Tweet

May 2
🌎We learn robot control policies from world models with real deployment.
1⃣ Robotic World Model (RWM) corrects errors through online interaction.
🔗sites.google.com/view/roboti…
2⃣ Uncertainty-Aware RWM adds uncertainty penalties during policy optimization.
🔗sites.google.com/view/uncert…
5
22
136
10,265
Chenhao Li retweeted

Jun 10
Random comments
1) not having a action bound in SAC is technically bad,
2) but having joint limits as action bounds for position control learning is also technically bad: the policy loses the ability to generate large torques near joint limits.
Maybe torque is better for SAC.

PPO has been the go-to algorithm for training robots in simulation. SAC is more sample-efficient in theory, but consistently fell short in practice. And while PPO thrives where data is cheap, it hits a hard wall when moving to real-robot learning.
🔥We set out to close that gap.

4
6
73
11,726
Chenhao Li retweeted

Jun 10
Thanks for this!
I want to start looking into off policy methods for humanoids and this is very useful 🙏🏼
1
1
3
1,155
Chenhao Li retweeted

Jun 11
Super cool to see
Tried using SAC for locomotion a few months ago and it kept breaking my head. The thing that got me was that asymmetric actor critic isn't equivalent across PPO and SAC. On policy the privileged critic magnifies the actors gradient. Off policy it sends it in a different direction entirely
Most people would just accept SAC doesn't work here. Glad to see Big PPO finally getting antitrusted. Hopefully this sparks a revival of off policy algorithms
PPO has long dominated robot locomotion training in simulation. SAC, despite its sample efficiency, couldn't keep up.
We analyze why:
🔗sabagian.github.io/sac_relea…
🔥Integrated into RSL-RL, our approach requires only minimal changes, making SAC a drop-in alternative out of the box.
2
4
51
8,922
Jun 10
PPO has long dominated robot locomotion training in simulation. SAC, despite its sample efficiency, couldn't keep up.
We analyze why:
🔗sabagian.github.io/sac_relea…
🔥Integrated into RSL-RL, our approach requires only minimal changes, making SAC a drop-in alternative out of the box.
5
987
Jun 10
Today, we bring SAC to RSL-RL, one of the most widely used RL frameworks in massively parallel robot learning, developed at RSL @leggedrobotics.
We try to understand the long-standing performance gap between SAC and PPO, and crystallize important factors
sabagian.github.io/sac_relea…
PPO has long dominated robot locomotion training in simulation. SAC, despite its sample efficiency, couldn't keep up.
We analyze why:
🔗sabagian.github.io/sac_relea…
🔥Integrated into RSL-RL, our approach requires only minimal changes, making SAC a drop-in alternative out of the box.
5
21
137
10,870
Jun 10
After many ablations, we left four important factors that make a difference
✅Right-sizing the action space
✅Treating timeouts as timeouts, not failures
✅Smoother targets via n-step returns
✅Starting exploration where it should
Check out our findings
arxiv.org/abs/2605.24975
1
8
782
Jun 10
This project is led by Gianluca Sabatini, supported by Chenhao Li @breadli428 and Marco Hutter @leggedrobotics. We thank Clemens Schwarke's implementation insights.
github.com/leggedrobotics/rs…
6
572

Jun 8
It’s a very first attempt to leverage pure generated videos to enable learning on physical platforms.
If one can close the loop from physics grounding back to video generation, then we have a self-evolving system.
Jun 8

NIL is building a long-term research agenda around natural intelligence rather than treating AI as a pure scaling problem.
The lab sits at the intersection of machine learning, cognitive science, neuroscience, and robotics, asking a different question:
what principles make intelligent behavior emerge in biological systems, and how can those principles be engineered into artificial ones?
5
24
2,447
Jun 8
Time to use AI-generated demonstrations!
Jun 8

I am so sad that I missed it, check out cool works in robot learning from ETH folks!
1
2
2,719
Jun 8
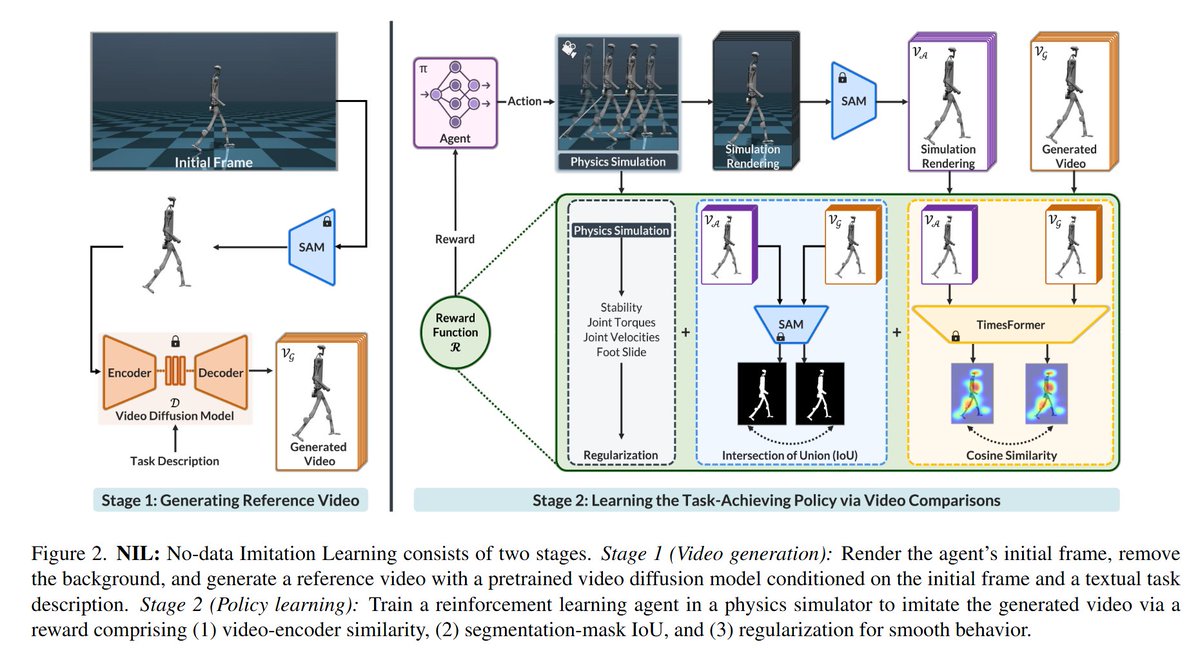
🤷What if we want to learn from human data... without human data?
In our work NIL (No-data Imitation Learning) @CVPR, we explore a simple but ambitious question:
Can robots learn directly from AI-generated videos without any curated demonstration data?
🔗nil.is.tue.mpg.de/
9
28
168
13,669
Jun 8
🗣️ This work a joint work ETH Zurich @ETH_en, MPI for Intelligent Systems @MPI_IS and @ETH_AI_Center, led by Mert Albaba @brtmertalb, Chenhao Li @breadli428, Markos Diomataris @Markos11571524, Omid Taheri, Andreas Krause @arkrause, and Michael J. Black @Michael_J_Black.
1
5
456
Chenhao Li retweeted

Jun 2
😍I love the usage of the arms to balance the climb!
More contact means making use of all parts of the humanoid!
Jun 2

⛰️We try to push motion learning beyond what one can do on flat ground.
Kudos to Zewei Zhang @ctki49, Kehan Wen @KehanWen170077, and Michael Xu @mxu_cg, who made this a reality.
Check out now
wholebodylocomotion.github.i…
1
8
1,846
Chenhao Li retweeted

Jun 2
Cool work done by my students @ctki49 @KehanWen170077
Perceptive motion generator tracker on rough terrain.
Jun 2
❗️Flat-terrain tracking is solved. Rough terrain breaks everything, because the reference itself has to change. So we built a system that generates references as it goes.
🦿Parkour over boxes, hurdles, stairs - all onboard.
🔗 wholebodylocomotion.github.i…
📄 arxiv.org/abs/2604.17335
1
7
47
6,525