
extracting value from data
Joined October 2007
- Tweets 969
- Following 2,024
- Followers 475
- Likes 1,070
12 Photos and videos



Mike Spaner retweeted

10 Jul 2025
It finally happened – we launched the new Datastar site and V1 (RC) 🚀
It’s been an incredible journey, and I feel honoured to be working with people like @DelaneyGillilan and Johnny Stevers. And there’s so much more yet to come!!
data-star.dev/
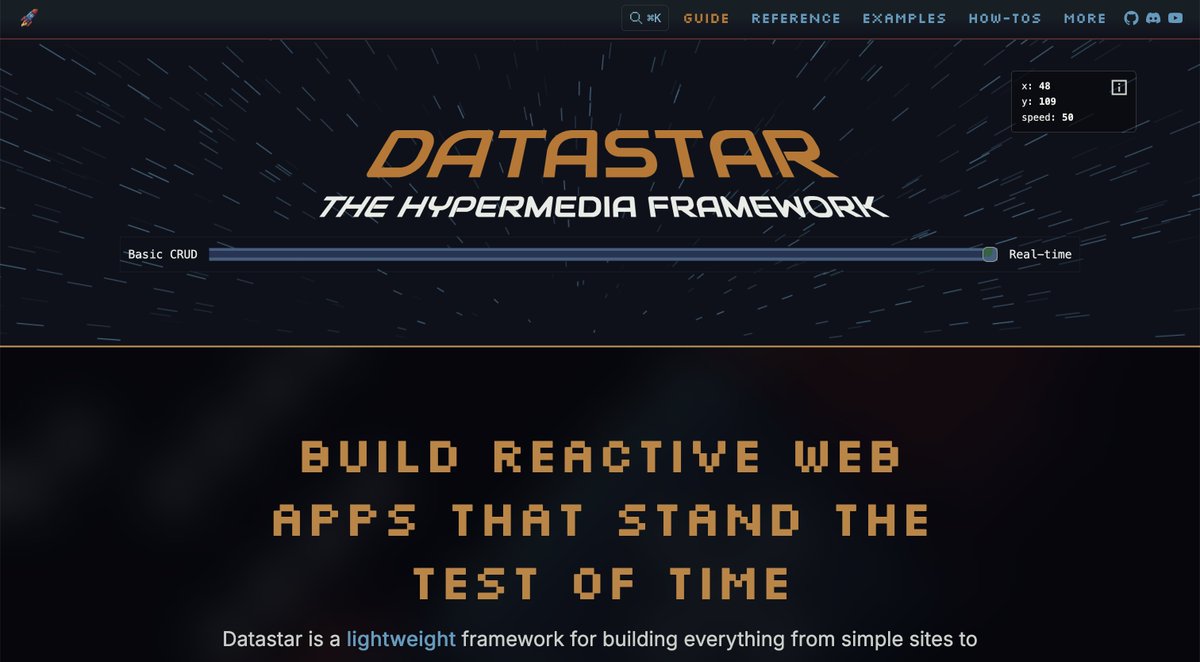
ALT The new Datastar homepage.
9
13
78
2,629
Mike Spaner retweeted

22 May 2024
RAFFLE 🏆 Like, retweet, and follow by May 28 (midnight EST) and you can win a signed copy of my Littoral Commander #wargame. May the odds be ever in your favor. 😉🎲
14
183
278
21,548
Mike Spaner retweeted

19 Apr 2024
I have been saying for years that Amazon Science has by far the best forecasting R&D team on the planet and what drives the innovation at the team is not focus on specific models but the methodology and in depth knowledge of forecasting which is becoming somewhat a lost art elsewhere.
This is reflected in the results - whilst time series LLMs have a long way to go, out of the recent high profile LLMs Amazon Chronos whilst shown to underperform to stats ensembles in some cases it is an example of stellar work and on a relative basis is much higher quality LLM compared to alternatives like Lag Llama and Saleforce Moirai as shown independent tests. More importantly is Amazon’s commitment to transparency and open source compared to say Google which still didn’t release its code.
What is even more interesting is integration of Amazon Chronos into AutoGluonTS with Chronos becoming just another model that users can reliably test on own data.
This move from Amazon Science is a stroke of genius in my view, a masterpiece signifying the way one should be looking at forecasting models. No model is going to be the best in all scenarios but some including Chronos will be.
And this is the only right way to look at forecasting and Amazon forecasting R&D team understands it well, that’s why they are the best forecasting R&D team on the planet, because they way how they look at time series planet 🌍 and innovate.
Kudos to all great amazon and ex amazon forecasting folks like @timoschowski , @canerturkmen and many others for moving the field forward.
@AmazonScience @autogluon
#timeseries #forecasting
3
30
209
31,988

Mike Spaner retweeted

8 May 2023
3 exciting innovations brewing for the Python ecosystem right now:
1. Literate programming tools for python, backed by @posit_pbc and @fly_upside_down youtube.com/watch?v=nllKcuX7…
2. The mojo language, a superset of Python backed by @Modular_AI and @clattner_llvm modular.com/mojo
3. Pyscript (wasm Python), backed by @anacondainc and @pwang, github.com/pyscript/pyscript
These innovations are early and are already impressive. I suspect they will revolutionize the developer experience in complimentary ways.
1
22
123
24,739
Mike Spaner retweeted

26 Jan 2023
Good news for time series enthusiasts!
Our deep learning open-source library, tsai, is getting a major upgrade over the next few weeks. We're enhancing our forecasting functionality to help you build more accurate predictions.
1
3
5
749

21 Dec 2022
RT @TheZachMueller: To celebrate Christmas I'll be giving away five seats to Walk with @fastdotai!
To enter the contest:
1. Comment on th…
49
Mike Spaner retweeted

29 Oct 2022
"What Makes Convolutional Models Great on Long Sequence Modeling?"
CNNs—not transformers—now dominate the hardest sequence modeling benchmark.
Here's how this happened: [1/14]
31
400
2,015
Mike Spaner retweeted

19 Sep 2022
I love this new article from @wasimlorgat -- the first "how to write great notebooks" tutorial I've seen. Such an important topic!
12
79
Mike Spaner retweeted

A week ago, I presented a lightning talk @JuliaConOrg on using #julialang for observational health #research.
I discussed the state of the art tools available and how I used this to generate results in investigating mental health disparities.
youtube.com/watch?v=5XsWUZX6…
1
5
16
Mike Spaner retweeted

29 Jun 2022
Excited to announce DayDreamer, an application of learned world models to robot learning without simulators!
DayDreamer enables a robot dog to learn to walk in one hour without resets, simulators, or demonstrations, as well as visual pick and place and navigation tasks
thread🧵
14
107
596
1 Mar 2022
With a solid success with #SLICED, premier of VIz Buzz is NOT TO BE MISSED!

Hosting a new game show tomorrow called Viz Buzz. Think of it like a data viz version of #SLICED. Stream starts at 8:30pm ET.
A little different than SLICED as well. One match consists of 3 contestants with ~30 mins to replicate a random data viz. 3 matches every Tuesday
2

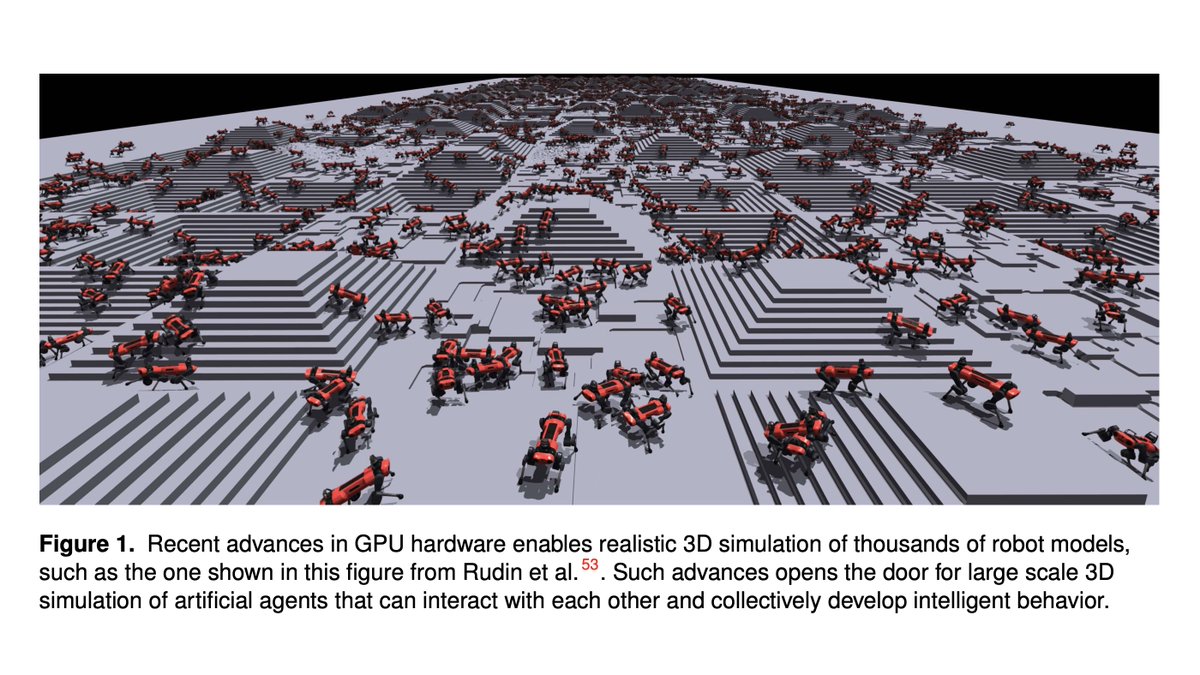
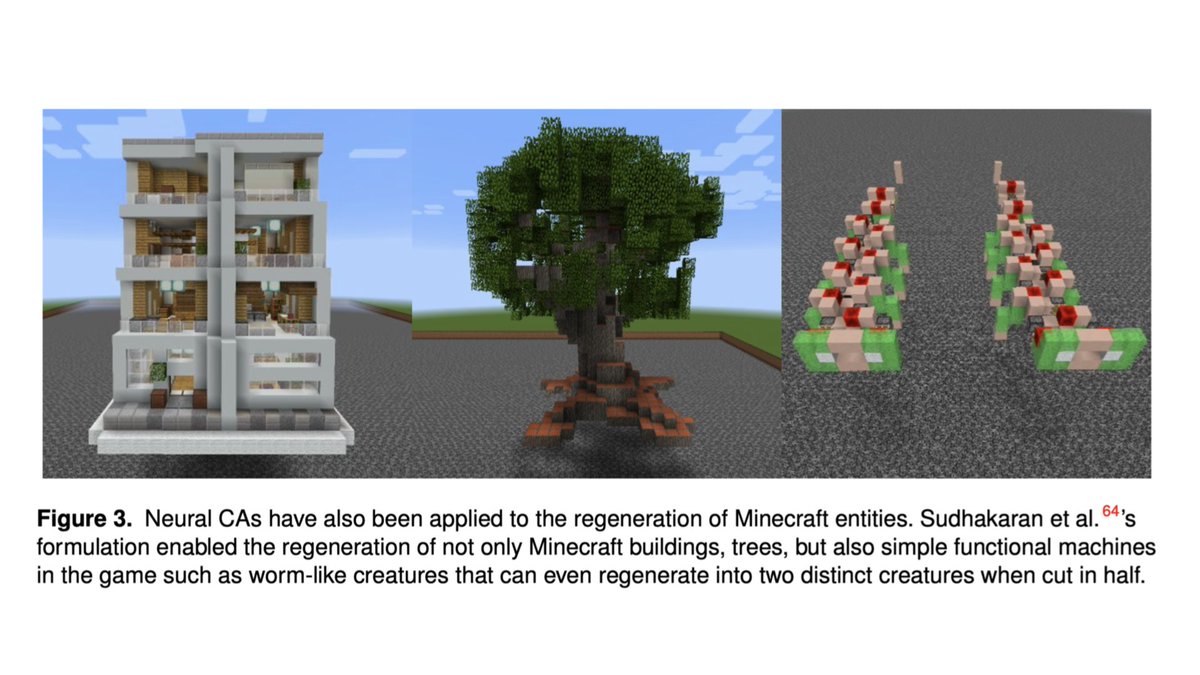
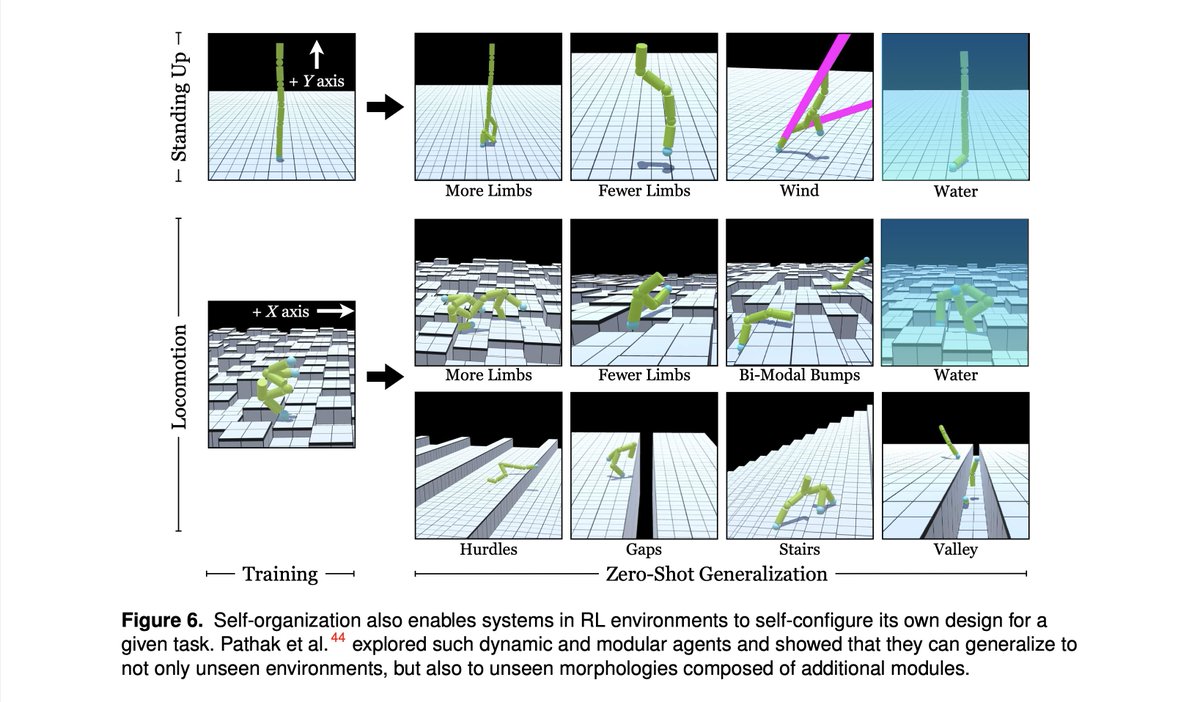
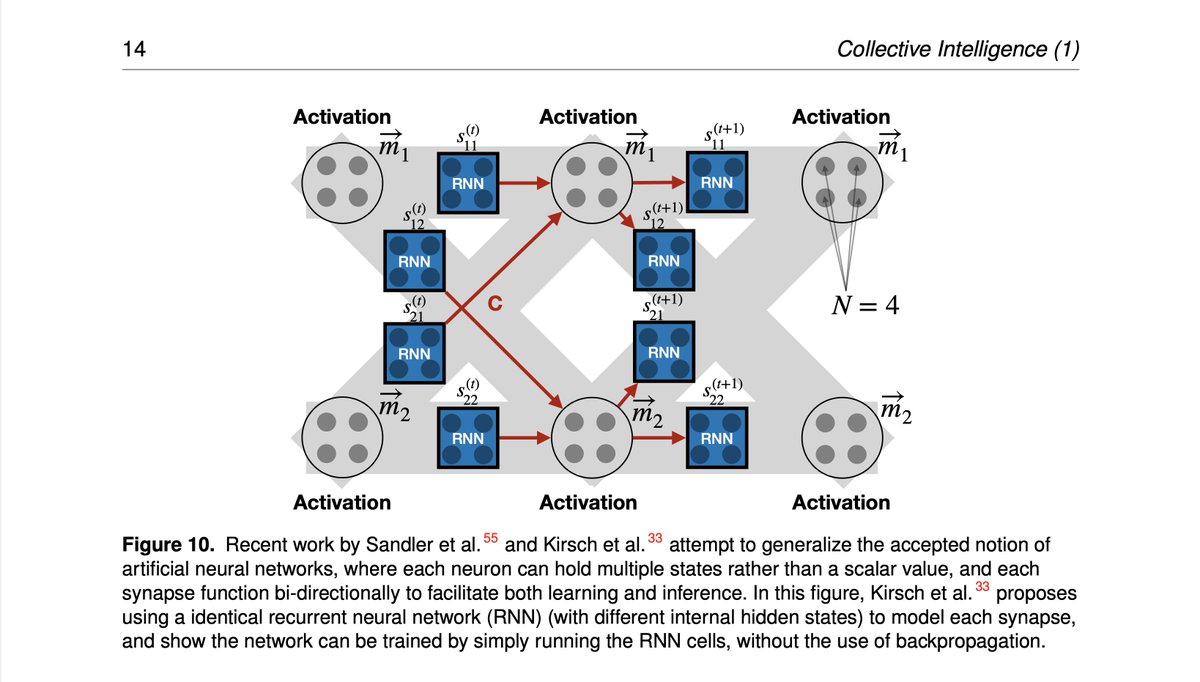
I’m super excited to see ideas from complex systems such as swarm intelligence, self-organization, and emergent behavior gain traction again in AI research. We wrote a survey of recent developments that combine ideas from deep learning and complex systems: arxiv.org/abs/2111.14377
23
284
1,414
Mike Spaner retweeted

3 Jan 2022
Golems, Owls & DAGs: Lecture 1 of Statistical Rethinking 2022. No hard work yet in this lecture. Just setting the stage. Lecture 2 dropping soon with Bayesian updating. youtu.be/cclUd_HoRlo
9
111
554

We hit 3k Twitter followers 🎉
To celebrate, we're sending Coiled swag to 10 lucky winners! That's right - you could be sipping from a Coiled mug like this one.
To enter, be following us @CoiledHQ & retweet this post! We'll announce the winners on Monday 12/13 at 12 PM EST 🔥

38
22
Mike Spaner retweeted

15 Nov 2021
New #sciml method out of the #julialang lab: using coarse-grained models as a foundation for a physics-informed surrogate to predict solutions of partial differential equations. IT'S SUPER FAST! Shown on Maxwell's equations. Thread below.
arxiv.org/abs/2111.05841
2
11
72
Mike Spaner retweeted

24 Sep 2021
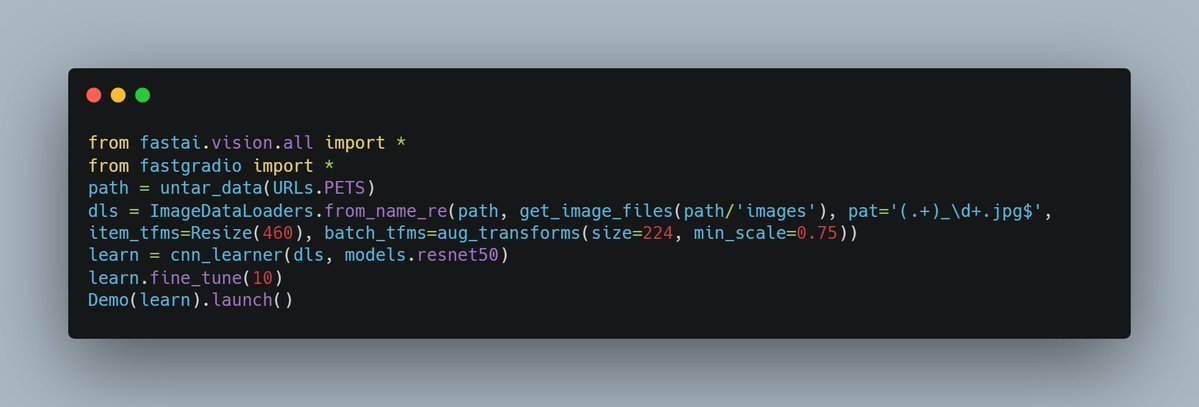
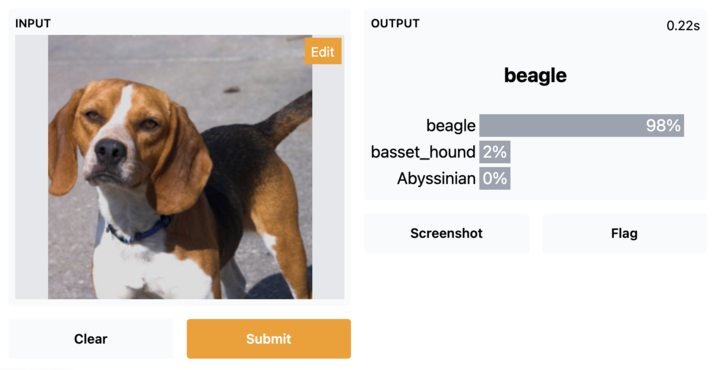
Easier than ever to demo a fastai model that you've built with @Gradio and the new *fastgradio* library ⚡️
Fastgradio: github.com/aliabd/fastgradio
@jeremyphoward @math_rachel @fastdotai
18
53
17 Aug 2021
1
1
8
4 Aug 2021
#SLICED playoffs tonight!… don’t miss @nickwan and @MeganRisdal data science game show rockstar hosts!
1
1