
Currently MS Robotics @CarnegieMellon @CMU_robotics with @katerinafragiad and @ybisk | Incoming CS Phd @JHUCompSci with @mangahomanga
Joined August 2020
- Tweets 47
- Following 437
- Followers 189
- Likes 68
7 Photos and videos




Pinned Tweet

Apr 9
Thrilled to announce I’m joining @JHUCompSci as a CS PhD student with @mangahomanga.
Looking forward to collaborating with new faculty members @_krishna_murthy, @jmin__cho, @anand_bhattad, @HaiminHu & @zihyunchiu and being part of this rising community.
Great things ahead!
8
3
74
5,027

Yash Jangir retweeted
I'm attending CVPR in Denver this week.
On workshop days, I'll be giving a keynote talk, participating in panels, and co-organizing a workshop. Details below.
If you're around, do say hi!
2
37
2,228
Yash Jangir retweeted

May 8
Launching my research group, MAGIC (Manipulation and General Intelligence Control) Lab @NUSComputing, Singapore!
We focus on building the next generation of human-centric models for robotic manipulation — deployable safely, reliably, and easily in the real world. Our research spans MLLM reasoning, 3D vision, robot learning, simulation, dexterous manipulation, and cross-embodiment learning.
Interested in joining? Sign up here and I'll send a reminder email: forms.gle/oJPLR2pLTt8kLCxZ7

9
29
341
26,061
Yash Jangir retweeted

May 7
Apparently, my students have brought binoculars to their office to bird watch during the day. The advantages of our new beautiful @HopkinsDSAI office space. 🦜🦆🕊️
Should I be worried about productivity?

5
10
66
8,339
Yash Jangir retweeted

May 6
We are back. After one year of quiet building.
Introducing GENE-26.5, our first robotic brain that takes a major step toward human-level capability.
For years, robotics has struggled to learn from the world’s largest and valuable data source: Humans.
Solving it means rethinking the whole stack from the ground up:
- A robotics-native foundation model.
- A 1:1 human-like robotic hand.
- A noninvasive data collection glove for motion, force, and touch.
- A simulator that turns weeks of experiments into minutes.
GENE-26.5 is trained across language, vision, proprioception, tactile, and action. We designed a set of tasks to test how far we can go with this new paradigm.
Fully autonomous, 1x speed, one model, same weights. (Enjoy with sound on)
We are approaching the endgame for robotics.
And this is just a beginning.
280
1,134
5,815
2,691,794
Yash Jangir retweeted
May 4
[Major life updates] 🎉
After 4 incredible years of my PhD at @UW @uwcse with @fox_dieter17849 and @RanjayKrishna, I'm joining @NUSComputing as an Assistant Professor this August, under the Presidential Young Professorship scheme!
More details 🧵👇
26
15
410
21,446
Yash Jangir retweeted

#KostasKeynoteLessons: Still curious about the "Keynote magic" behind my slides?
Check out the full Keynote source files from my recent talk at the ELLIS Winter School on Foundation Models (FoMo) 2026!
Grab the files in the thread and feel free to remix.
1
4
42
4,763
Apr 25
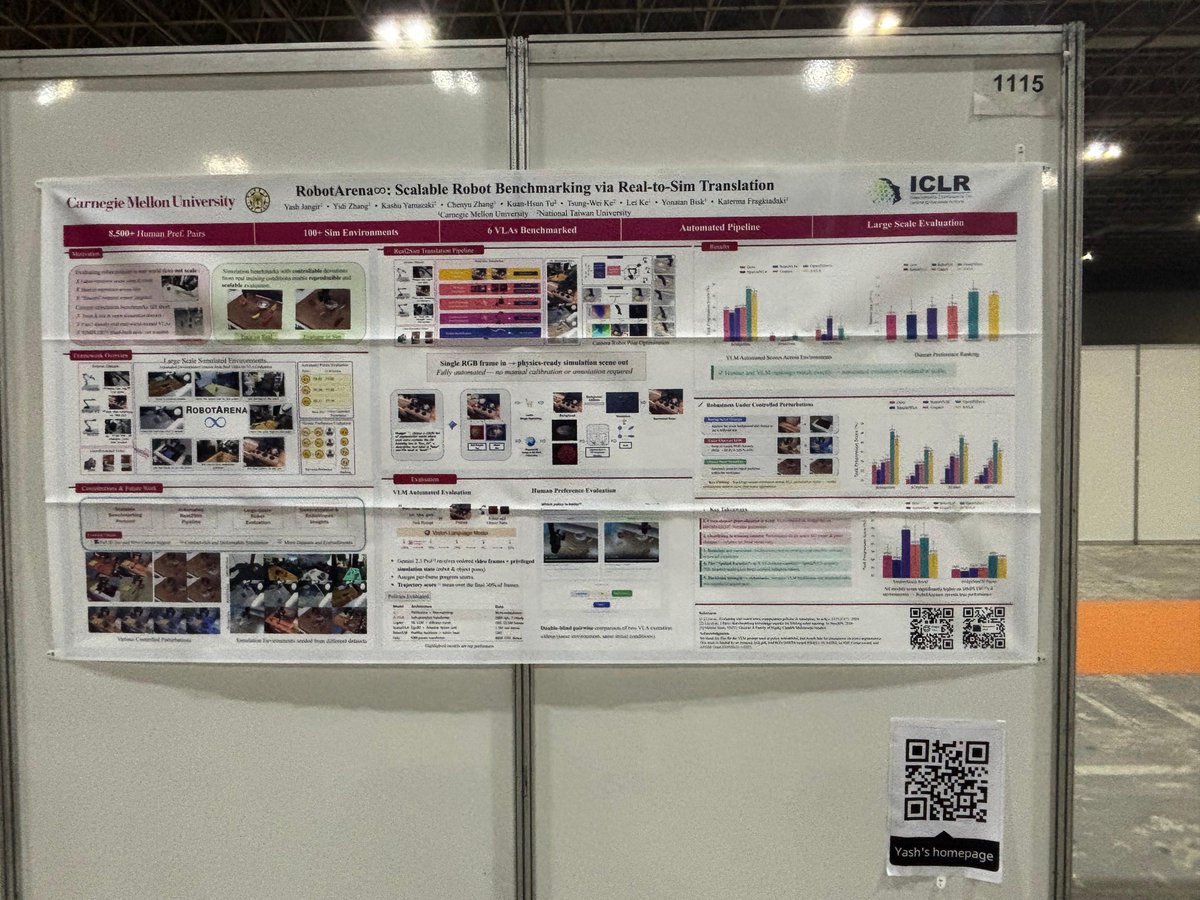
Checkout my work RobotArena ∞ at ICLR 2026 in Rio 🇧🇷
If you're around, come check out our poster at Pavilion 3, P3-#1115 and chat with @YidiZ13267
#ICLR2026 #MachineLearning #AI
1
3
13
625
Yash Jangir retweeted

Apr 22
We're thrilled to organize the 2nd Workshop on Agents in Interactions: From Humans to Robots!
Submit your best work by May 8 and join us at CVPR in Denver to discuss research in this exciting space
w/ @yufei_ye @DandanShan_ @jiaman01 @xiaolonw Alan Yuille
6
32
9,966
Apr 16
Checkout @mihirp98's amazing work!!
Apr 16

What if AI learned physics the way Newton did – by experiencing it?
We built Sim2Reason: train LLMs inside virtual worlds governed by real physics laws, zero human annotation.
Result: 5–10% improvement on International Physics Olympiad, zero-shot. 🧵
1
6
1,671
Yash Jangir retweeted

Robot learning is growing at @JHUCompSci @HopkinsDSAI
Thanks @DexmateAI for supporting us!
@anand_bhattad @mangahomanga Greg Hager and I put this proposal together.
I just happened to be the one to hit submit :)
Apr 9

Congratulations to @_krishna_murthy for being selected for our Build with Vega U Research Grant Program! His proposal: "Dynamic and Dextrous Manipulation by Autonomous Learning from Multisensory Data."
3
7
38
3,689
Yash Jangir retweeted
Apr 6
We have fully open-sourced all of our code, and you can now test our VLA on CALVIN and LIBERO-Pro.:
github.com/Vision-Language-S…
Have fun building and steering your pre-trained policy.
Feb 5

Why do generalist robotic models fail when a cup is moved just two inches to the left? It’s not a lack of motor skill, it’s an alignment problem. Today, we introduce VLS: Vision-Language Steering of Pretrained Robot Policies, a training-free framework that guides robot behavior in real time.
Check out the project: vision-language-steering.git…
👇🧵 (Watch till the end: VLS runs uncut, steering pretrained policies across long-horizon tasks.)
2
15
98
10,256
Yash Jangir retweeted
New release led by @s1wase
Further lowers the barrier of entry into bimanual manipulation learning.
Flexible teleop/IK/perception. Easy setup to replicate
tri-ml.github.io/raiden/
Mar 24

Our 3D Vision team (3DGR) is releasing Raiden — a data collection toolkit for YAM robots.
Built for scalable, high-quality data: supports leader–follower SpaceMouse teleop, multi-camera setups, and modern stereo depth (incl. TRI learned stereo).
tri-ml.github.io/raiden/
5
26
4,484
Mar 18
🤖 What would LMArena for robotics look like?
Introducing RobotArena ∞
We turn real videos into simulated environments and evaluate robot policies at scale using VLM scoring human preferences
A scalable benchmark for robot generalists
🔗 robotarenainf.github.io/
Details 🧵👇
5
28
126
21,918
Mar 18
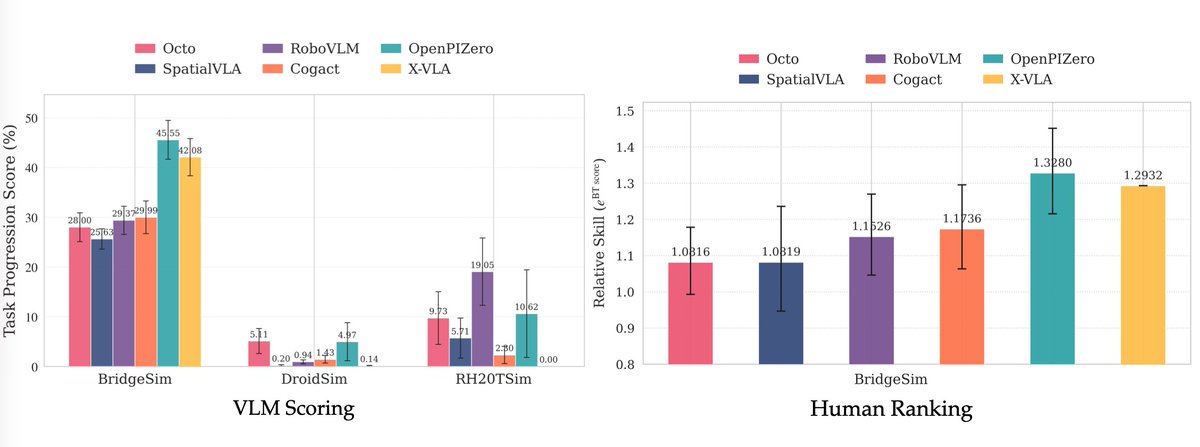
Unprecedented Evaluation Scale
We evaluate robot policies across
✅ hundreds of environments
✅ thousands of perturbations
✅ thousands of VLM and human preference evaluations
VLAs perform well in BridgeSim, but degrade sharply in DROIDSim and RH20T. VLMs and humans agree on these rankings.
1
4
494
Mar 18
Robot capabilities are scaling fast.
Evaluation must scale with them.
Otherwise, we optimize for the wrong things.
RobotArena∞ closes that gap.
Ready to scale your eval? 🛠️
🌐 Website: robotarenainf.github.io/
📄 Paper: arxiv.org/pdf/2510.23571
@CMU_Robotics @SCSatCMU
@KaterinaFragiad @ybisk @kashu_yamazaki @YidiZ13267 @leike_lk @pcseanlo
5
481