
145 Photos and videos










Jun 12
The Fleet Science team at Amazon Robotics has two open postdoctoral positions. I've been working with the exceptional folks in the Fleet Science team. This is a unique opportunity to do cutting-edge science and have a real-world impact at Amazon scale.
1
1
9
589
Jun 12
(2) Multi-Agent Path Planning & Explainable AI
- Multi-agent path planning using learning and optimal transport
- Explainability and interpretability techniques for DeepFleet Foundation Models
amazon.jobs/en/jobs/3117815/…
1
192
Jun 12
Postdocs work closely with senior science advisors, collaborate with scientists and engineers across Amazon Robotics, and publish in top-tier academic venues.
Please share this with any strong Ph.D. students or recent graduates who may be interested or DM me!
70
Jun 3
Two new papers at #CVPR2026 and #AAMAS2026 from @ruiliu0 and Chak Lam Shek from my lab. Rui and Chak are both on the job market this year!

1
9
612
Jun 3
Stable and Efficient Single-Rollout RL for Multimodal Reasoning
@ruiliu0 et al. #CVPR2026
Paper: arxiv.org/pdf/2512.18215
1
1
321
Jun 3
Multi-Agent Trust Region Policy Optimisation: A Joint Constraint Approach
Chak Lam Shek, @guangyao_shi, and Pratap Tokekar
Paper: arxiv.org/pdf/2508.10340 #AAMAS2026
103

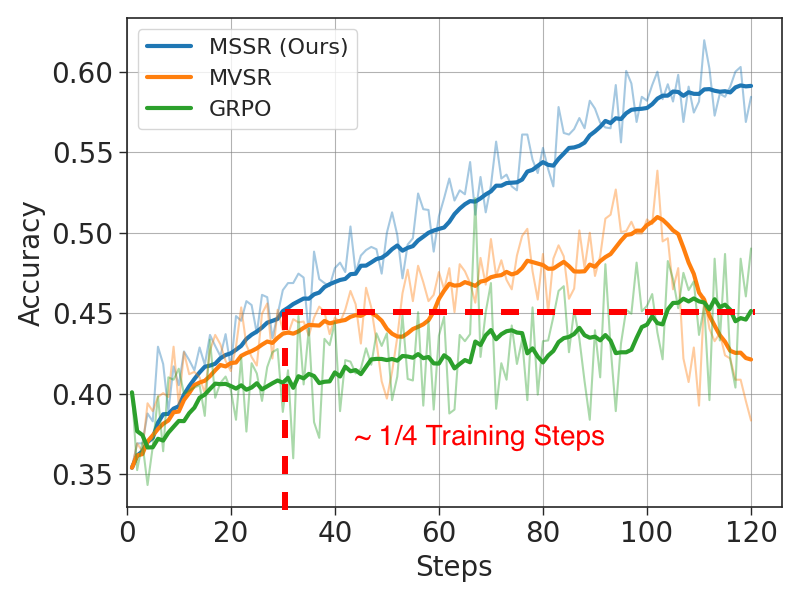
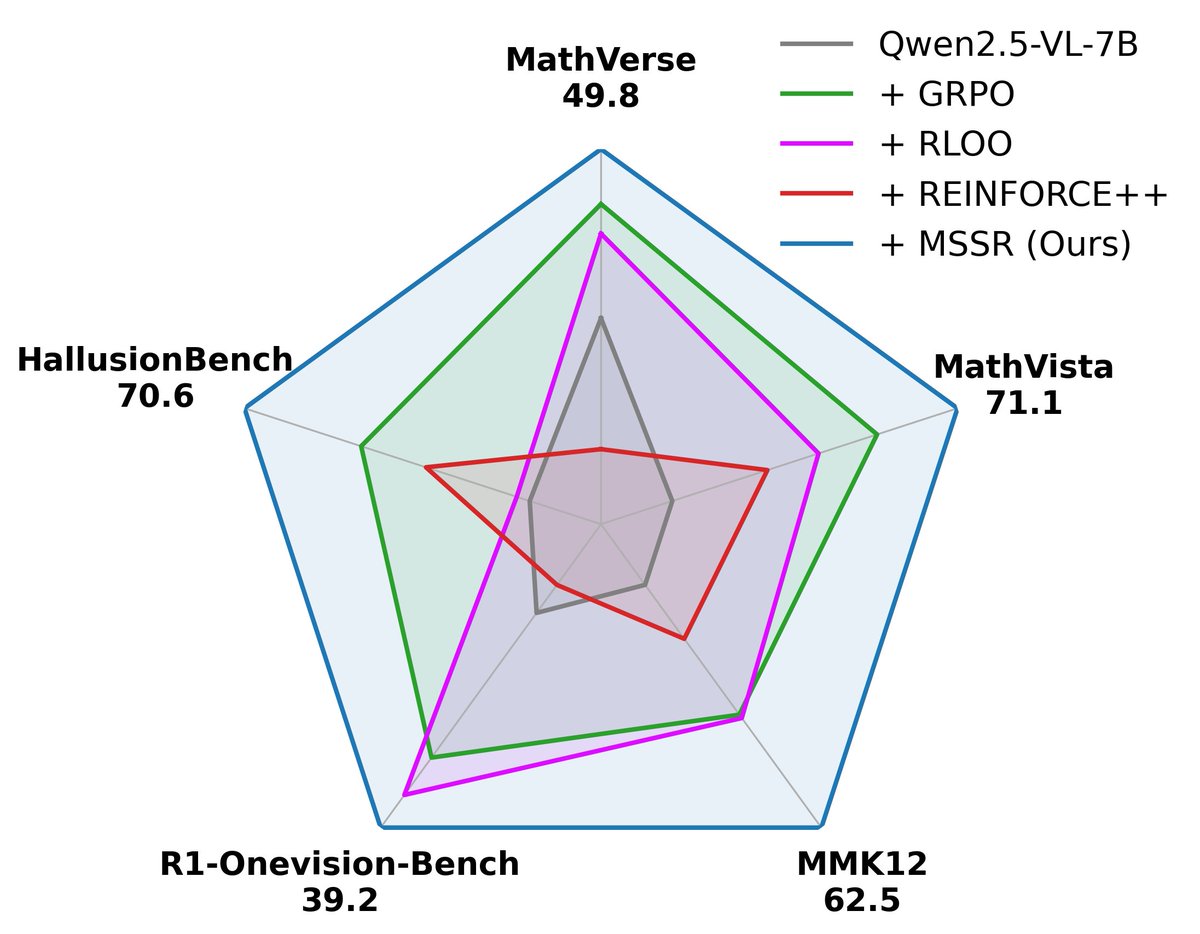
I am heading to #CVPR2026 next week to present our work MSSR (Multimodal Stabilized Single-Rollout). This work aims to improve the training efficiency of multimodal RLVR by using just single rollout instead of group-based approaches such as GRPO.
With around 1/4 of training steps, our approach can reach similar accuracy as GRPO. While trained for the same amount of compute and test on multiple benchmarks for generalization performance, our approach can outperform other group-based baselines.
Thanks to all my amazing collaborators Dian Yu, Lei Ke, @HaolinLiu616, @YujunZhou0017, @LiangZhenwen, @haitaominlp, @ptokekar, Dong Yu.
I will also be actively looking for full time opportunities, very happy to connect!
Paper: arxiv.org/pdf/2512.18215
Project page: mssr-proj.github.io
1
1
6
317
May 19
Congratulations Dr. @peihong_yu Proud to be hooding and celebrating your well deserved success!

2
28
1,254
Pratap Tokekar retweeted

Join us and @JohnsHopkinsIAA on Monday for a joint talk on trends in safe and reliable reinforcement learning, featuring @JHUAPL’s @aekoppel and @umdcs & @amazon Robotics’ @ptokekar. Learn more here: cs.jhu.edu/event/iaa-cs-semi…

ALT Institute for Assured Autonomy & Computer Science Seminar Series. Talk Trends in Safe and Reliable Reinforcement Learning. February 9, 2026, 1–2 p.m. Zoom. Alec Koppel, Johns Hopkins APL. Pratap Tokekar, UMD & Amazon.
3
5
649



During my phd work (fish-finding robots @UMNCSE ), our record low during a field op was -15. It is particularly difficult to type when the laptop (lcd!) screen refresh is 1hz, and your fingers are numb claws.
Wouldn't trade that memory for anything.
1
5
295
Pratap Tokekar retweeted

4 Dec 2025
Interested in theoretical RL?
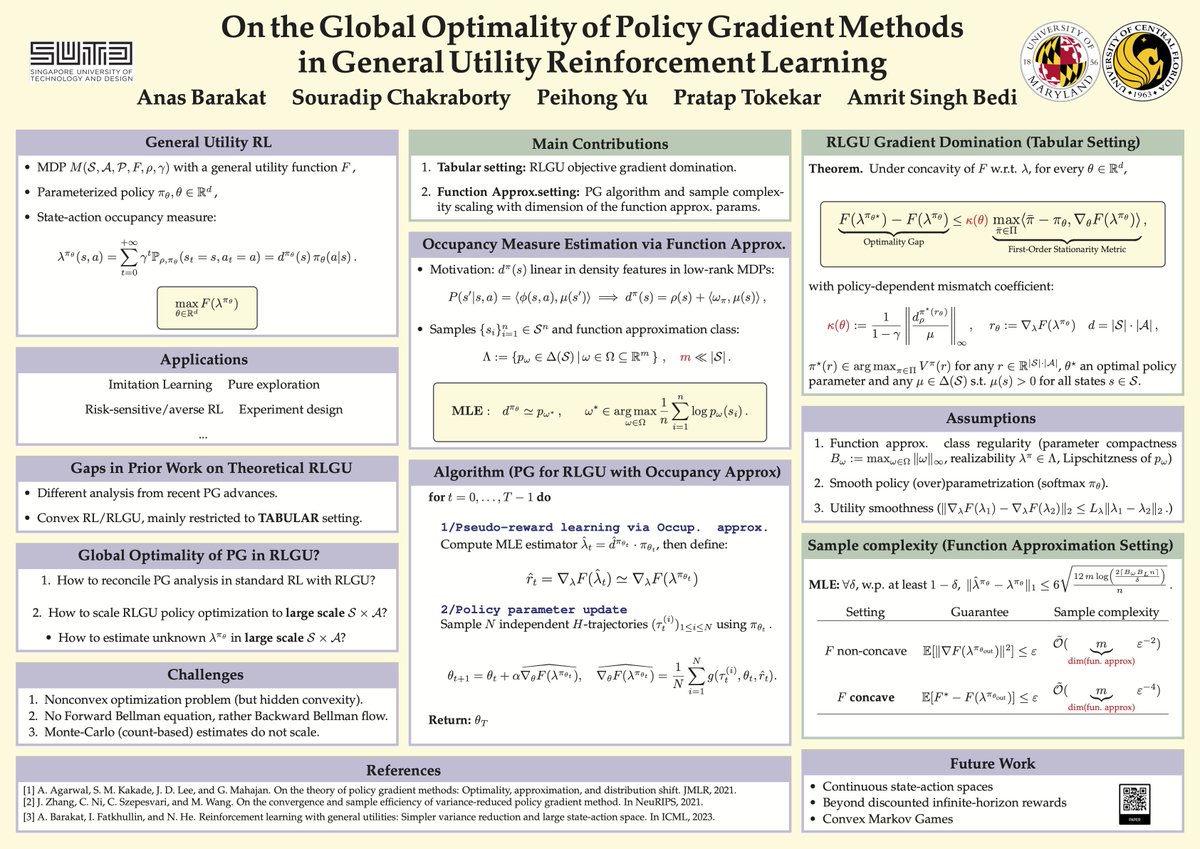
Find us at poster #3312 at #NeurIPS2025
🗓 Thu Dec 4, 4:30–7:30 PM
📍 Exhibit Hall C/D/E
@anas__barakat @SOURADIPCHAKR18 @ptokekar @peihong_yu

2
3
20
870
1 Dec 2025
Excited to be at #NeurIPS2025 this week. Would love to meet folks interested in robotics. We will be presenting two papers...
1
2
11
531
1 Dec 2025
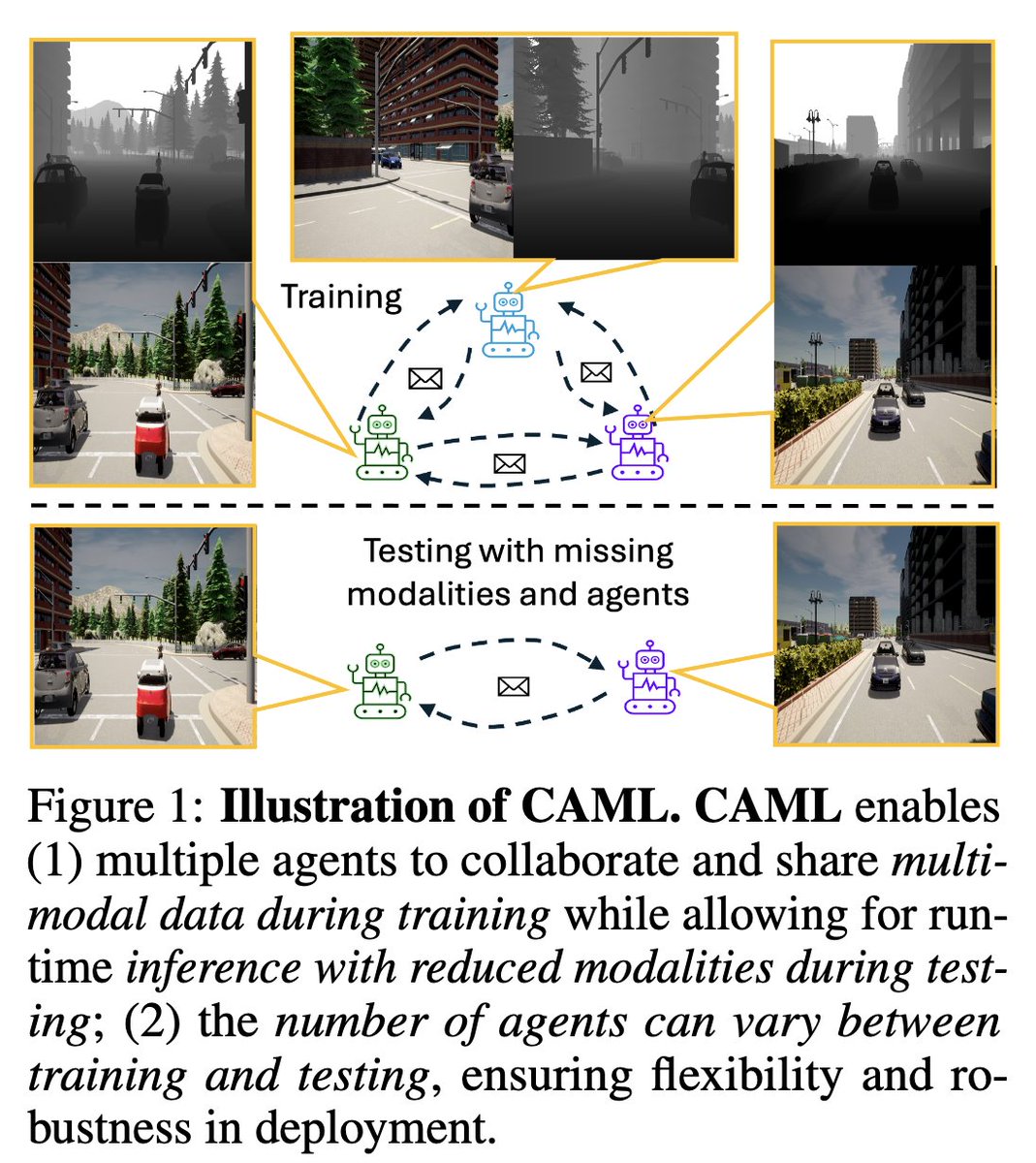
CAML: Collaborative Auxiliary Modality Learning for Multi-Agent Systems
Thu 4 Dec 4:30 p.m. PST — 7:30 p.m. openreview.net/forum?id=OhUu…
@ruiliu0 @gammaumd
2
2
316
1 Dec 2025
Would especially love to chat with students interested in doing a PhD @umdcs and super cool work that we're doing at Amazon Robotics
1
3
242
20 Nov 2025
‘Tis the season.. @jbhuang0604 has amazing advise as usual with really cool slides (including a blurb from me that’s so old it mentions something called Webex?!)
Some of my earlier notes in case you’re interested tokekar.com/docs/ExperienceF…
20 Nov 2025

Sharing the slides for a talk on faculty job search
Hope it's helpful to people exploring and preparing for the process.
Feedback is welcome!
dropbox.com/scl/fi/p7xdtsqbu…
10
1,015
12 Nov 2025
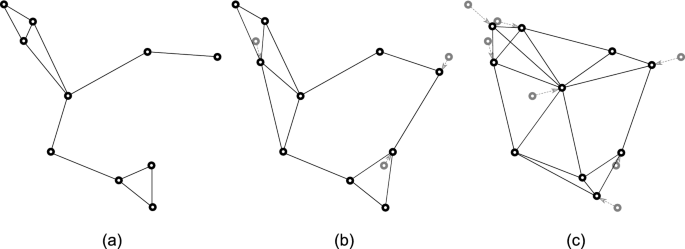
We expanded our best paper finalist @DARSSymposium with a graph neural network based policy to restore connectivity in a team of robots facing adversarial conditions. Check it out!
11 Nov 2025

🆕Fast #kconnectivity restoration in #multirobotsystems for robust communication maintenance: algorithmic and learning-based solutions by @guangyao_shi, Md Ishat-E-Rabban, Griffin Bonner & @ptokekar.
🔗bit.ly/47JMCYI
@DARSSymposium @RAASumd @umdcs @iribecenter
1
5
519
30 Oct 2025
Congratulations to Amisha on being a finalist in the student presentation competition at the Amazon Robotics research symposium!
30 Oct 2025

Honored to be featured by @umiacs_umd for showcasing my work in robot learning at the @Amazon Robotics Research Symposium in Boston!
Grateful for my advisor @ptokekar, collaborators & the UMD community for their support.
🔗 umiacs.umd.edu/news-events/n…
7
746
16 Oct 2025
Exciting new work on learning compact policies
16 Oct 2025

Can robots get to the point?🎯
We’re sharing AFFORD2ACT—a way for robots to use semantics from a short prompt to keep only the pixels that matter and then act.
This replaces heavy, dense inputs with a small state for control.
1/6
#Robotics #AI #Manipulation #Affordance #Keypoints
11
795