
14 Photos and videos






RAAS Lab retweeted

16 Nov 2025
Excited to announce I'll be presenting my PhD Candidacy Proposal, "Learning Robot Policies from Intuitive Human Guidance," this Monday, Nov 17th, at 11:30 AM EST.
Join in person at IRB-4105 or virtually via Zoom. All are welcome!
umd.zoom.us/my/tokekar

1
2
161
RAAS Lab retweeted
11 Apr 2025
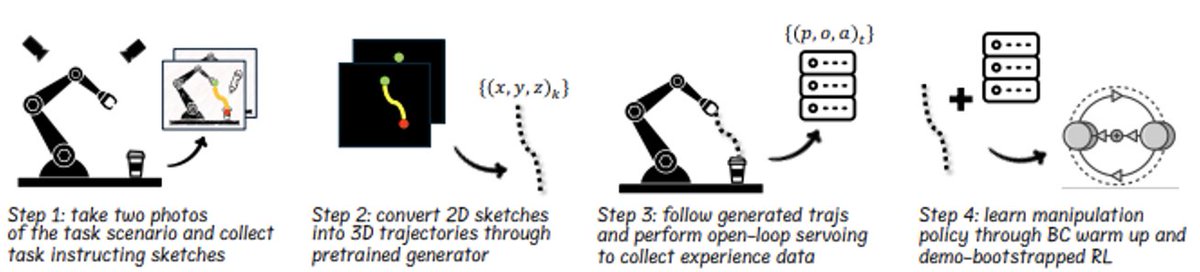
🎉 Excited to share that our paper Sketch-to-Skill is accepted to RSS 2025!
Congratulations and huge thanks to my amazing collaborators Peihong Yu, @singhanukriti, @zahir_mahammad, and my advisor @PratapTokekar
Let me walk you through it. 🧵👇
#RSS2025
1
5
14
2,374

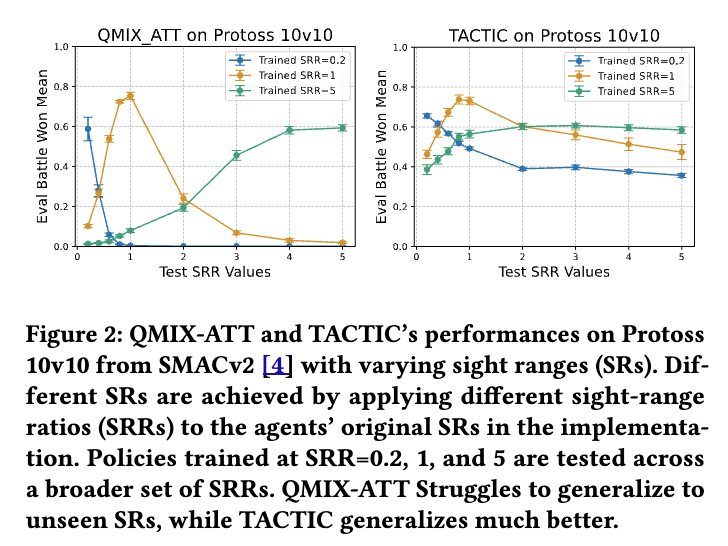
If you are @RealAAAI #AAAI2025, catch @peihong_yu discuss her work on contrastive pre-training of inter-agent communication in Multi-Agent Reinforcement Learning for better generalization in unknown conditions

1
2
4
393
Paper: arxiv.org/abs/2501.02174
When: March 4, 10AM
Where: MALTA workshop sites.google.com/view/malta2…
76
🚀 Proud to announce two talented graduates, Ruthwik @RuthwikDasyam and Zahir @zahir_mahammad, from our UMD RAAS Lab are now on the market! 🎓🤖
Check out the thread below, for more details on their work! ⬇️
#Robotics #ReinforcementLearning #AI #Graduation #UMD

1
2
8
1,107
Ruthwik’s work focuses on preference-based reinforcement learning, integrating VLMs into RL to align reward functions with human intent. His work extends to LLM-driven mobile manipulation and has also contributed to multi-drone cooperative transport.
ruthwikdasyam.com
1
4
179
Zahir’s work centers on learning-based methods for robotic manipulation, integrating behavior cloning and reinforcement learning to develop policies for simulated env as well as real-world implementation including ur3e, turtlebot and drones. zahirmahammad.github.io/
5
130
RAAS Lab retweeted

23 Dec 2024
I am excited to share that I will be joining Nanyang Technological University (NTU), Singapore, as an Assistant Professor in the College of Computing and Data Science starting Summer 2025! @NTUsg @NTU_ccds
I am currently recruiting PhD students for Fall 2025. If you are interested in working on robot planning and learning, you can find more information here: lnkd.in/eVSZ4HfM
Thank you for helping me spread the word!
#PhDOpportunity #Robotics #NTUsg
11
18
145
19,565
RAAS Lab retweeted

23 Dec 2024
Proud advisor again! I was fortunate to have Yoon as one of my first students. He’s a terrific researcher and a very nice person to work with. Highly encourage folks to apply to his group.
23 Dec 2024

I am excited to share that I will be joining Nanyang Technological University (NTU), Singapore, as an Assistant Professor in the College of Computing and Data Science starting Summer 2025! @NTUsg @NTU_ccds
I am currently recruiting PhD students for Fall 2025. If you are interested in working on robot planning and learning, you can find more information here: lnkd.in/eVSZ4HfM
Thank you for helping me spread the word!
#PhDOpportunity #Robotics #NTUsg
1
17
690
RAAS Lab retweeted
20 Dec 2024
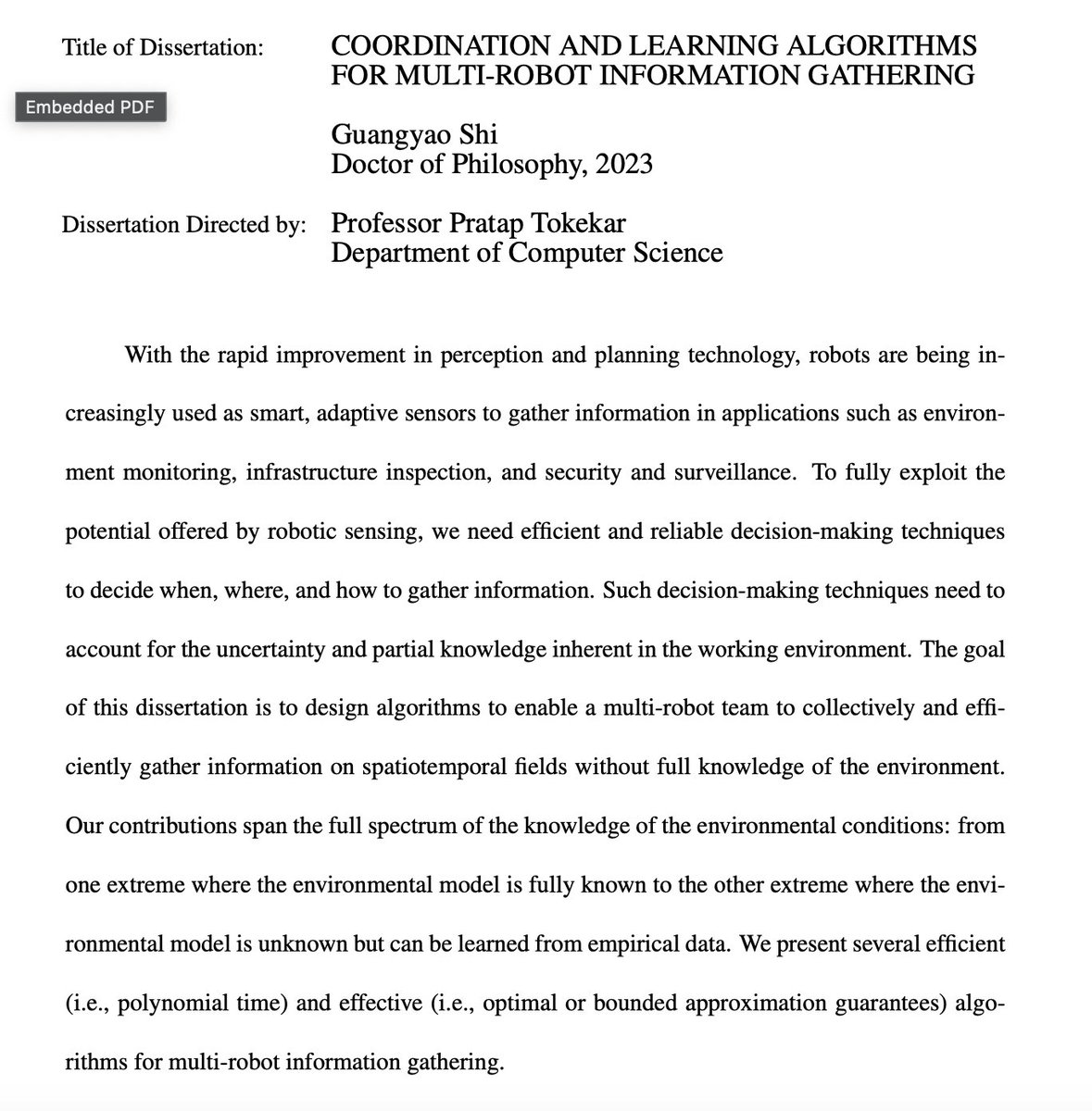
Proud advisor moment! @guangyao_shi's dissertation was selected as a finalist for the Best Dissertation award by the IEEE TC on Multi-Robot Systems @ieee_ras_mrs!
Check out his dissertation on coordination and learning algorithms for multi-robot systems. @eceumd @UMDResearch

1
15
1,369
RAAS Lab retweeted

20 Dec 2024
Congratulations @guangyao_shi from all of us @uscresl @CSatUSC @USCAdvComputing and @USCViterbi !! And congratulations to you to @ptokekar
20 Dec 2024

Proud advisor moment! @guangyao_shi's dissertation was selected as a finalist for the Best Dissertation award by the IEEE TC on Multi-Robot Systems @ieee_ras_mrs!
Check out his dissertation on coordination and learning algorithms for multi-robot systems. @eceumd @UMDResearch
1
11
755
RAAS Lab retweeted
10 Dec 2024
Current students. Former students. Former student’s current student. Former student’s former student. #ISRR2024 in Long Beach! @amishabhaskar @lfzhou917 @guangyao_shi @zahir_mahammad

3
17
595
RAAS Lab members are presenting two papers this week at #NeuRIPS2024 and #ISRR
@JoshMcClellan0 will present his work on multi-agent reinforcement learning at NeuRIPS
x.com/JoshMcClellan0/status/…
6 Dec 2024

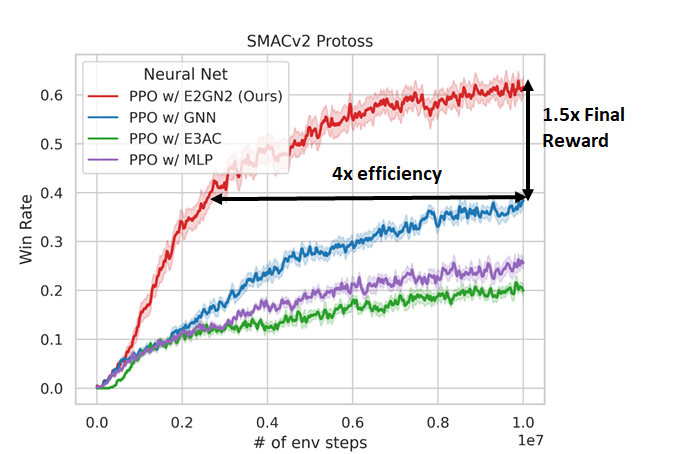
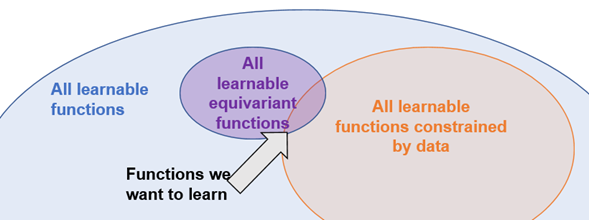
I'm excited to share that our paper, "Boosting Sample Efficiency and Generalization in Multi-agent Reinforcement Learning via Equivariance," has been accepted to NeurIPS 2024! 🎉 arxiv.org/abs/2410.02581
@ptokekar @furongh
3
1
5
398
@amishabhaskar and @zahir_mahammad will present their work on combining planning and learning for robot manipulation
x.com/amishabhaskar/status/1…
8 Dec 2024

Excited to be at #ISRR in Long Beach this week! I'll be presenting my paper, PLANRL, on Dec 10th at 10 AM. Excited to share insights from my work, learn from others, and connect with the amazing robotics community. See you there! #ISRR2024 #RoboticsResearch
1
2
155
RAAS Lab retweeted
8 Dec 2024
Excited to be at #ISRR in Long Beach this week! I'll be presenting my paper, PLANRL, on Dec 10th at 10 AM. Excited to share insights from my work, learn from others, and connect with the amazing robotics community. See you there! #ISRR2024 #RoboticsResearch
4 Oct 2024
🌟 Thrilled to share that our paper "NAVINACT: Integrating Navigation and Interaction for Robust Manipulation" has been accepted at #ISRR2024!
📍 See you in Long Beach, CA this December!
@umiacs @UofMaryland @RAASumd @umdcs @UMDResearch
2
4
597
RAAS Lab retweeted
8 Nov 2024
For your Friday commute...
I had a great time chatting about our research on the @RobotTalkPod! All the links below..
8 Nov 2024

📢 New Episode Alert!
This week, I chatted to Prof. Pratap Tokekar (@ptokekar) from @UofMaryland about how teams of #robots with different capabilities can work together.
Listen now: robottalk.org/2024/11/08/epi…
1
4
11
1,393
RAAS Lab retweeted
21 Oct 2024
Last week, I presented my work on LAVA (Long-horizon Visual Action-based food acquisition) at #IROS2024 in Abu Dhabi! Great discussions on robotic manipulation with amazing researchers.

3
9
706
We will be presenting four papers #IROS2024! Details in the thread...
Stop by the posters and presentations to say hi to @amishabhaskar and @Manavmishra96
2
2
5
1,652
11:00-11:15, Paper ThBT12.1
Long-Horizon Visual Action Based Food Acquisition
raaslab.org/projects/RoboSpo…
1
1
3
180
15:30-16:30, Paper ThPI5T6.3
LANCAR: Leveraging Language for Context-Aware Robot Locomotion in Unstructured Environments
raaslab.org/projects/LLM_Con…
4
1,057