
Solving package management with pixi @prefix_dev
Joined October 2022
- Tweets 582
- Following 390
- Followers 197
- Likes 1,233
Photos and videos
Ruben Arts retweeted

Jun 1
expectations vs reality of getting into robotics:
everyone posts dancing humanoids and simulations
you: version hell, hardware incompatibilities, computer catching fire the moment something works
real boots on the ground physical AI reporting.
(yes, literally)
youtube.com/watch?v=IfdPzJ34…
#robotics #physicalAI @NVIDIARobotics @seeedstudio
5
2
19
1,724

Ruben Arts retweeted

If you want to come talk about robots (or turtles) we're holding a meetup on Tuesday night.
luma.com/xayz5tru
2
8
657
Ruben Arts retweeted

May 22
Increasing the security of our users and the ecosystem is a top priority for us. That's why we've added OAuth2 login flow with scoped tokens for a better `pixi auth login` experience, and scoped "Trusted Publishers" & API Keys
Read more: prefix.dev/blog/pixi-auth-go…
1
1
1
173
Ruben Arts retweeted

May 18
Thanks, Rubén Arts, for the opportunity of participate in the Pixi blog 🤓
prefix.dev/blog/pixi-at-inte…
1
4
12
1,012
Ruben Arts retweeted
May 18
Guest blog post by @fmrico! See how Pixi and RoboStack improve his workflow at Universidad Rey Juan Carlos, improving teaching and robotics projects.
prefix.dev/blog/pixi-at-inte…
#ROS #robotics #opensource
5
10
861
Ruben Arts retweeted
May 14
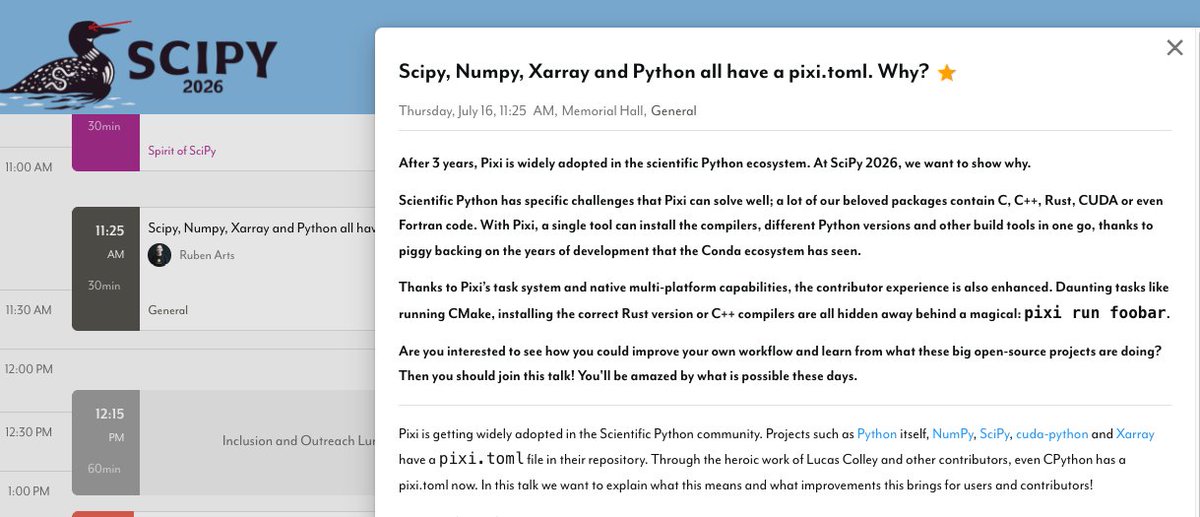
Want to understand why more and more Scientific Python projects are addopting Pixi? We'll give an overview during our talk at #SciPy2026 !
2
5
232
Ruben Arts retweeted
May 13
The latest version of Pixi comes with a new lockfile "v7"! It locks down build dependencies for the first time, making your builds even more reproducible. And of course fixes a number of issues.
Read more in our blog post: prefix.dev/blog/lock-file-v7
3
5
313
Ruben Arts retweeted

May 12
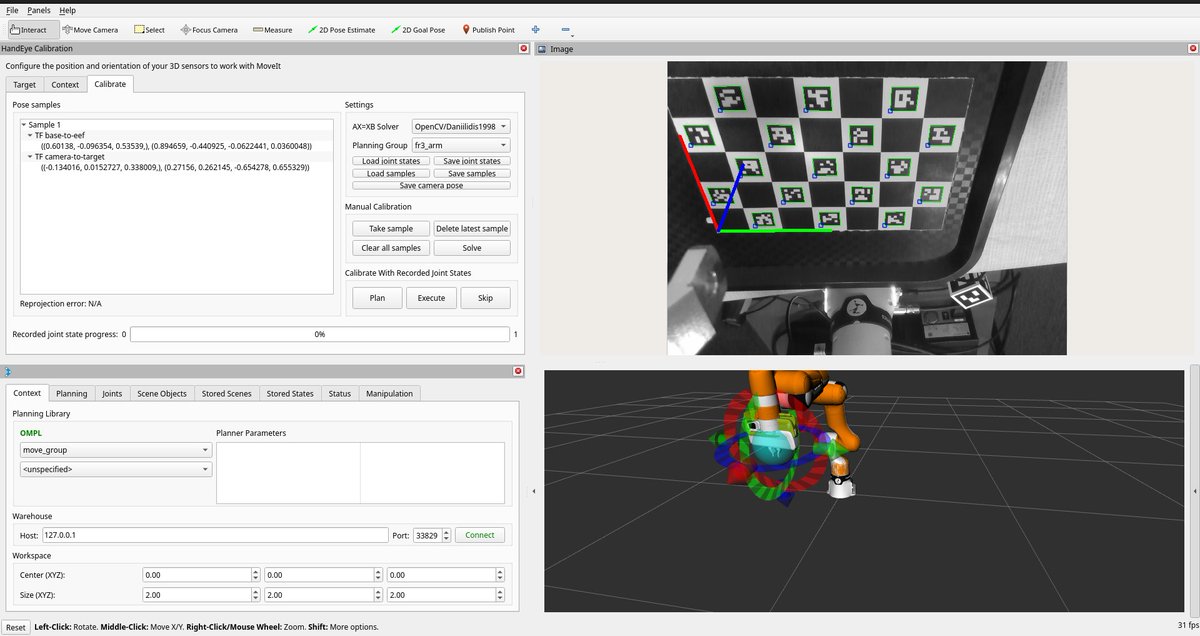
Hand-eye calibration on a Franka with RealSense cameras can be surprisingly brittle.
After stitching together franka_ros2 MoveIt Calibration a few times, I got tired of the setup overhead and built a unified repo for it.
No Docker. No system ROS 2 install. One repo.
Clone it, run pixi install, and start calibrating eye-in-hand or eye-to-hand.
Thanks to @prefix_dev 's pixi-build preview feature, franka_ros2 moveit_calibration can be built together in one shot. 🙌
Hope it saves someone a few hours: github.com/XingxinHE/franka_…
2
3
227
Ruben Arts retweeted

May 6
This is your codebase on clankers.
5
2
59
10,732
Ruben Arts retweeted
Apr 30
Ever want to just quickly send some files? sendme by iroh is a very simple clean tool to get it done. No ssh or networking required, just a simple send-receive command.
Quickly install it with Pixi 🚀

1
5
382
Ruben Arts retweeted
Apr 28
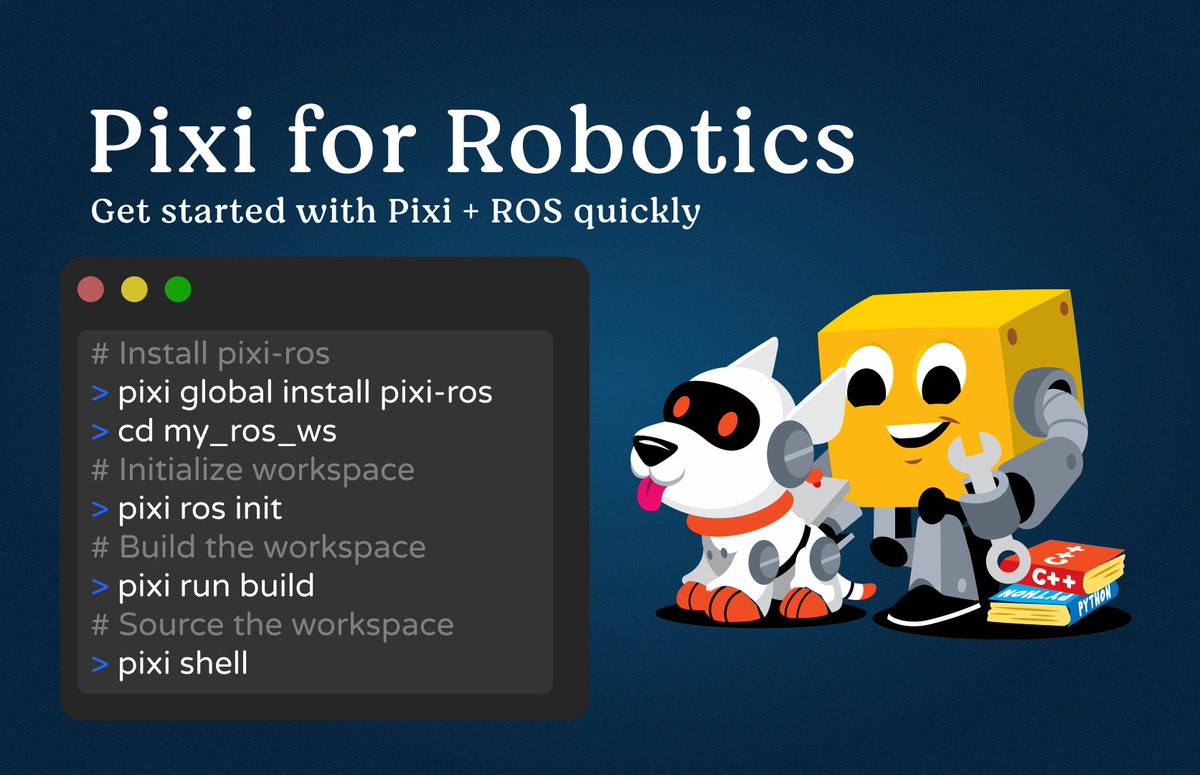
Pixi is gaining traction fast in robotics, so we built a dedicated landing page to help roboticists get up and running quickly.
pixi.prefix.dev/latest/robot…
#ROS #robotics
1
19
64
4,199
Ruben Arts retweeted
Apr 27
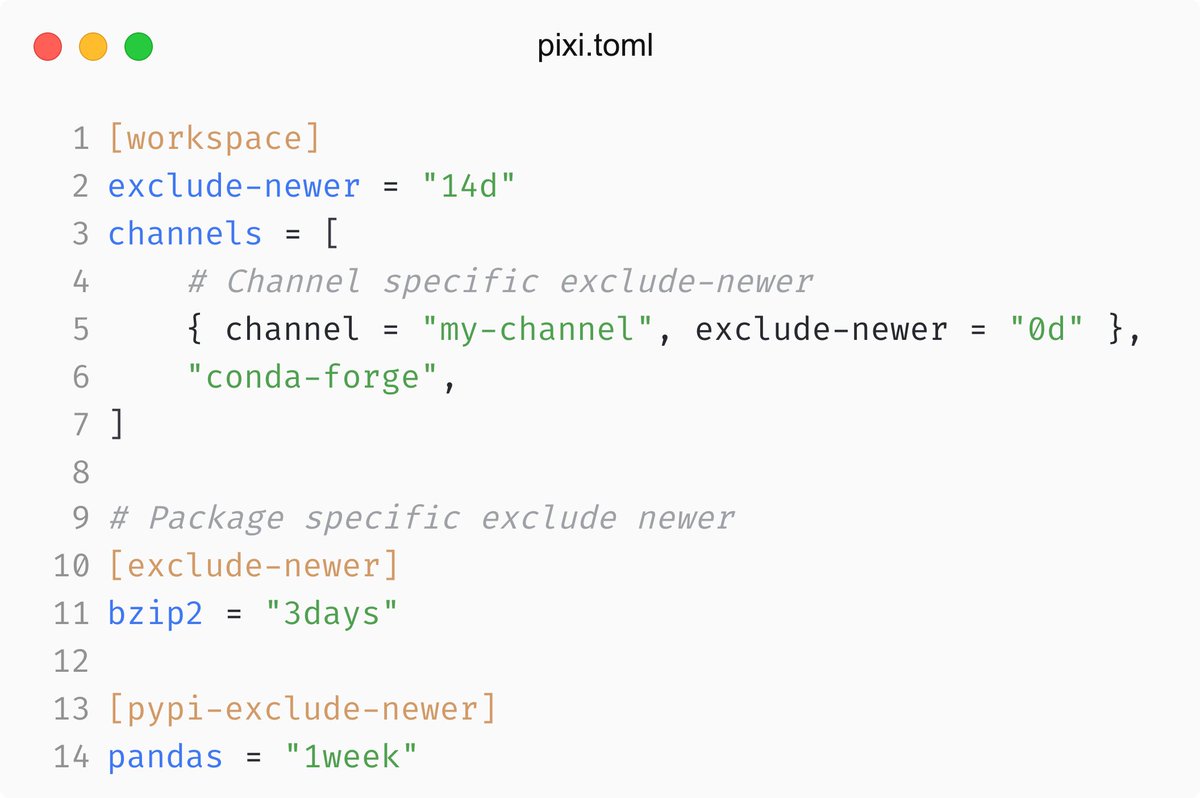
Pixi now supports relative `exclude-newer` definitions. This allows users to set a cooldown period before using packages from the internet.
This helps avoid pulling in vulnerabilities discovered shortly after release.
5
12
879
Ruben Arts retweeted
Apr 22
We're thrilled to announce our second non-prefix core maintainer of Pixi!
Welcome Lucas Colley! He's been an ESOC 2025 student and since then kept being active, both in the Pixi repo, our Discord community and by adding Pixi to Open-source projects like CPython, SciPy & Numpy!
2
11
506
Ruben Arts retweeted

Apr 22
It's happening! 312 Packages done ✅ Thank you @wep21_ for the amazing contribution!
1
3
3
250

I want to publicly thank @wolfvollprecht and the @prefix_dev team. Despite the fact that pixi/mise somewhat compete for the same users, they’ve been incredibly helpful integrating conda-forge with mise and helping me out with challenging sigstore issues. Classy!
1
30
1,881

Ruben Arts retweeted

Apr 16
I've been on a SLAM/SFM kick. It's one of the more underexplored and lacking areas when it comes to human teleop/data collections, so I've brought over Deep Patch Visual Odometry/SLAM to @rerundotio and @Gradio. With this example, we now have
1. pycuvslam
2. pycolmap/glomap
3. mast3r-slam
4. dpvo/slam
all integrated into rerun. The question becomes, which method should be used in what situations?
They all make different trade-offs with different camera requirements and throughput/accuracy. What about when a new method comes out?
Now that I have several different methods, I plan to use VSLAM-LAB for evaluation. It uses @prefix_dev to isolate all the dependencies of each of these methods and easily compare them against each other. In particular, I'll be converting the data preprocessing, algorithm outputs, and evaluation into rerun recordings (rrd files). This will allow both programmatic querying of anything stored in the files (which method had the highest ATE-to-FPS ratio? Which dataset/sequence caused the most difficulty? etc. etc.), all with easy visual inspection using the rerun server to link them all together.
Another really important side effect of this is how it impacts agents. As Karpathy said
```
LLMs are exceptionally good at looping until they meet specific goals, and this is where most of the "feel the AGI" magic is to be found. Don't tell it what to do, give it success criteria, and watch it go.
```
by having accuracy and throughput metrics deeply tied with human inspectable artifacts. One can really accelerate agentic development with an actual understanding of how the method/data performs. I think this is another killer use case that I'll be really leaning into to make ingestion of new datasets/methods trivial with an agent.
I'm making it my mission for folks to understand that rerun as a visualization tool only scratches the surface of what its true benefit is. Deep integration between data and visuals, with powerful query capabilities. I'll be focusing on the SLAM use case first and then bringing this into the full egocentric/exocentric data collection domain!
Apr 10

I've migrated the old Mast3r-SLAM example I had made last year to the latest version of @rerundotio and made a bunch of improvements! I wanted to spend some time with agents to modernize it. Here's an example of me walking around with my iPhone and getting a dense reconstruction at about 10FPS on a 5090.
Heres the following improvements I made.
Brought it into the monorepo with proper packaging:
• Using @prefix_dev pixi-build to get rid of all the mast3r/asmk/lietorch vendored code with just a few small patches. This let me remove so 60k lines of code from the repo!
• Don't have to build the lietorch code on my machine anymore, which was taking ~10 minutes to compile (and also made it work on blackwell when it previously did not)
Rebuilt the @Gradio interface:
• Fixed incremental updates, .MOV uploads, and stop behavior
• Made the CLI Gradio interface share the same entry point so updates automatically propagate
Upgraded the @rerundotio integration:
• Switched to a multiprocessing async logging strategy
• Added video/pointmap/confidence logging
• Improved blueprint layout and hid noisy entities from 3D view
• Biggest perf win was the async background logger - documented about a ~2.5x speedup from decoupling logging from tracking
The newest and most interesting part was my attempt to replace the CUDA kernels for Gauss-Newton ray matching with a @Modular Mojo backend. As a Python dev, every time I look at CUDA code I basically shy away as it's pretty difficult for me to understand. Mojo let me rewrite the matching logic in a syntax I'm more comfortable with while still getting near-CUDA performance. Mojo is now the default matching backend with CUDA fallback. One major piece that's missing is the custom PyTorch op path, but I'll eventually do that as well.
I heavily leaned on Claude Code to do the CUDA → Mojo migration, and I have no doubt it's not the cleanest or most idiomatic, BUT it's way more readable for me and helps me better understand the underlying algorithm.
This was a ton of work, and a large part of why I'm doing it is how the monorepo compounds. This becomes an artifact for the next example I want to build with Claude that I can point to, which will make it even faster to implement. The compounding nature of this is really interesting and part of why I'm spending so much time trying to make things nice and readable.
6
25
271
40,742
Ruben Arts retweeted
Apr 16
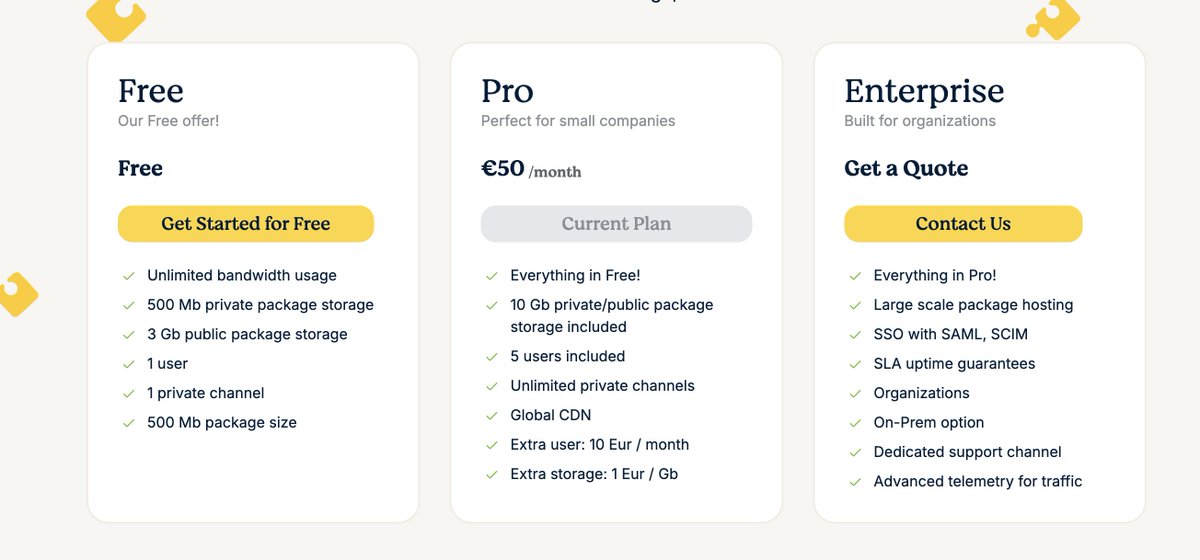
Over the past years, our platform has grown from just a few small channels to over 600 Conda channels storing more than 20TB of data.
To help scale it further, today we are launching a fair pricing model based on your usage and needs.
prefix.dev/blog/welcome-chan…
1
1
5
303
Ruben Arts retweeted
Apr 15
Do you want to control your Spot robot dog from a Pixi environment? You can now easily install the spot-cpp-sdk from @condaforge!
github.com/boston-dynamics/s…
3
12
488