
I am an engineer researching the core algorithms of autonomous mobile robots. Ph.D. in Engineering
Joined March 2009
- Tweets 55
- Following 105
- Followers 628
- Likes 442
14 Photos and videos













会社の同僚が開発したVS Codeプラグイン版の点群ビューアも、ついに公開しました!
VS Codeのストアから簡単にインストールできます。(「q3d」で検索)
多くの点群フォーマット(PCD、PLY、LAS、LAZ、E57)に対応して、大規模な点群も軽快に表示できます。
ぜひお試しください。

インストール不要でサクサク動く点群ビューアを公開しました!
ここにアクセスして点群ファイルをドラックアンドドロップするだけで使えます。
panasonic-advanced-technolog…
詳しくはこちら
qiita.com/hrpad/items/588474…
4
102
678
67,543

第31回ロボティクスシンポジアで最優秀賞をいただきました!
スライドを公開しました。反射強度を利用するタイプのLiDAR SLAMです。ぜひチェックしてください。
docswell.com/s/scomup/59N8N9…
47
289
19,943
最新のq3dviewer(1.2.9 )をインストールすると、LASから自動的に座標系情報を読み取り、OpenStreetMapから地図を取得し、点群と同時に表示できるようになりました。(座標系情報がなくても手動入力も可能)
ぜひ試してください。
>pip install q3dviewer[tools]
github.com/scomup/q3dviewer
1
23
167
7,567
likd-tree の Python 版もリリースしました!
動的な点の追加と自動再平衡(FAST-LIO2 の ikd-tree みたいな Incremental Insert & Rebalance)ができる Python KD-Tree、たぶん世界初?
github.com/scomup/likd-tree
3
33
2,122
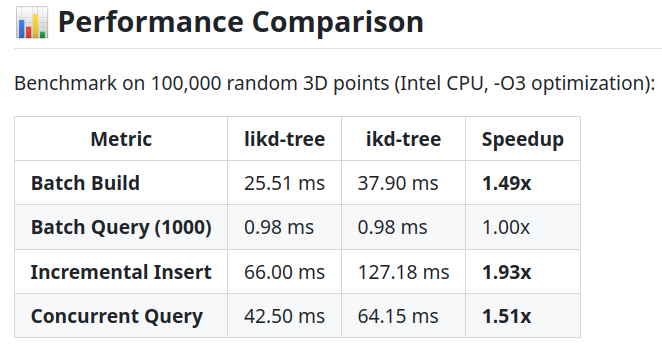
kd-treeを再buildせず、動的な追加機能が有用だが、できるOSSが少ない。
( ikd-tree は可能、でも可読性と性能を改善したく )
年末年始の自己学習で、新しいOSS: likd-tree を作りました。
github.com/scomup/likd-tree
特徴:
* 効率的な 点追加 & 並列な再build
* 超軽量(約 375 行)
* ikd-tree より高速
5
36
2,748
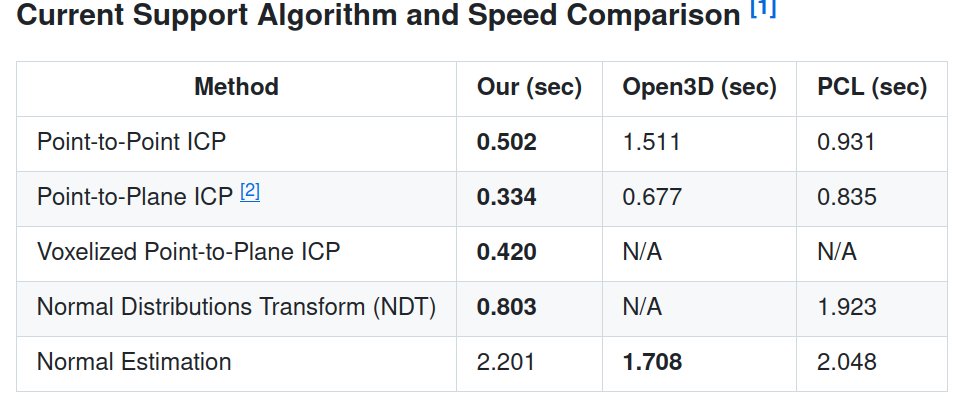
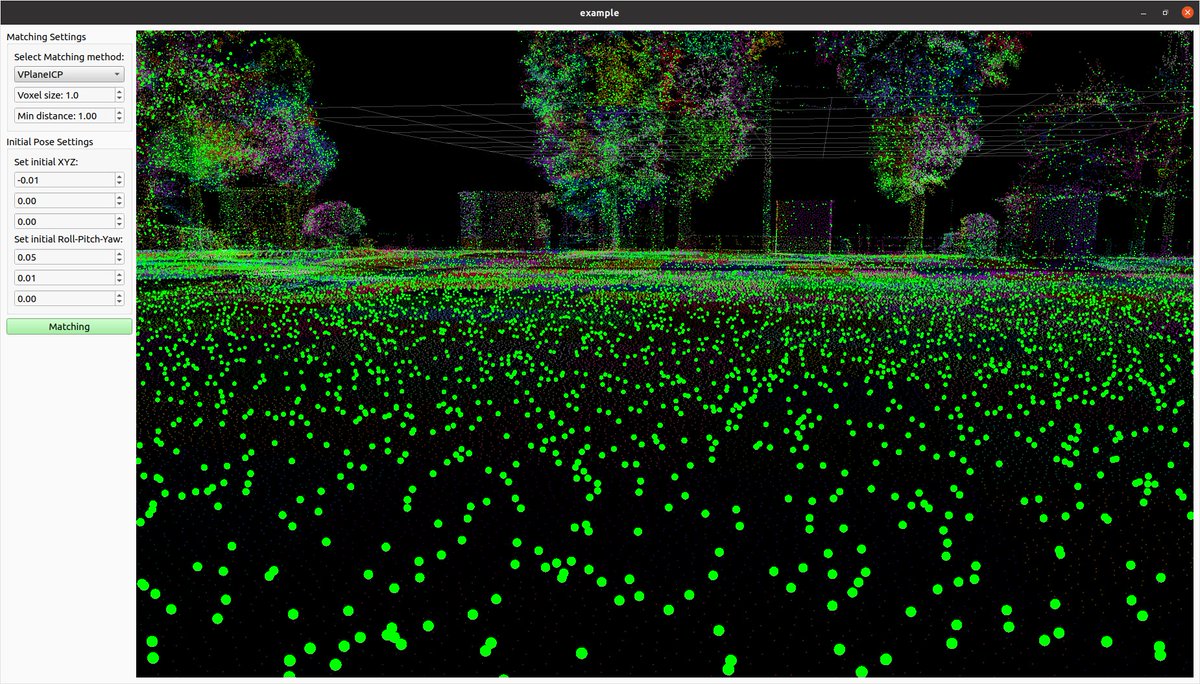
純粋な Python 実装でありながら、徹底した NumPy 並列化により、C 実装の PCL や Open3D よりも高速かつ軽量な点群マッチングライブラリを作ってみました。
いろいろ面白いデモも用意しているので、ぜひ遊んでみてください!
github.com/scomup/point-clou…
3
96
723
44,965
q3dviewerに点群の動画を作成ツール(film_maker)をリリースしました。
視点移動を設定し、滑らかな動画を生成します。
遊んでみてください。
github.com/scomup/q3dviewer
使い方の紹介:
qiita.com/scomup/items/75c94…
1
25
156
18,214
自作の3D点群ビューアーをオープンソース化して公開してみました。
そこそこ大規模な点群もスムーズに動作できます。
遊んでみてください。
github.com/scomup/q3dviewer
qiita.com/scomup/items/75c94…
87
477
54,480
EKF(extended Kalman filter)を簡単に理解できる記事を書きました。
ぜひ読んでください。
*可視化
*すべての式の数学的導出
*Python実装
qiita.com/scomup/items/a2393…
45
309
17,208
Liu Yang retweeted

18 Dec 2024
Announcing GitHub Copilot Free!
A new free tier for GitHub Copilot, available for everyone today in @code
No trial. No subscription. No credit card required.
Learn more in our blog: aka.ms/copilot-free
ALT A thumbnail with a blue, black, and green gradient background, with the VS Code and GitHub Copilot logos in the foreground and a graphic of the Copilot Chat window hovering below.
256
2,766
14,170
1,210,059
今回は「3D Gaussian Splatting」の学習について、わかりやすく解説する記事を書きました。
3D Gaussianはどうやって学習しているの?など詳しく知りたい方ぜひ読んでください。 qiita.com/scomup/items/92716…
77
324
21,687
「3D Gaussian Splatting」について、わかりやすく解説する記事を書きました。ぜひご覧ください。
//今回は画像生成についての内容で、次回は学習についても書く予定
qiita.com/scomup/items/d5790… #Qiita
100
532
57,391
リー群ベースにバンドル調整を解説する記事を投稿しました!
qiita.com/scomup/items/f8632…
ソースも公開しています。
github.com/scomup/Mathematic…
14
95
7,783
リー群を用いたSLAMのループ閉じ込みの残差計算やヤコビ行列の導出など、わかりやすく解説する記事を投稿しました~
ソースも公開しています。
github.com/scomup/Mathematic…
SLAMのループ閉じ込みを完全理解 qiita.com/scomup/items/d5999… #Qiitaアドカレ #Qiita
50
247
19,188
問題:AとBは同じ剛体に所属する。Aの初期速度とIMU測定値既知。Bの加速度と角速度を計算してください。
LiDAR とIMUの密結合するとき、考えないといけない重要な問題だと思いますが、ネット上の情報が少ないので、qiita記事を書きました。
IMUの測量の剛体変換 qiita.com/scomup/items/fadef… #Qiita
20
106
8,743