
ダイキン工業 テクノロジー・イノベーションセンター 技師長 / 元LeapMind社外取締役 / 元Preferred Networks / 元IBM東京基礎研 / Tweets are my own.
Joined May 2007
- Tweets 35,353
- Following 2,325
- Followers 11,771
- Likes 2,950
1,187 Photos and videos











Pinned Tweet

Apr 2
#未踏会議 2026
配信アーカイブが再公開されたようです。比戸がMCのマヂカルラブリー・野田クリスタルさんに「本当はAIロボットでM-1チャンピオンが作れるかを議論したい!」と喰い付いている"AI実装最前線"セッションは58:00辺りから。
youtu.be/M6n4_g0r67I?si=ImYy…





9
43
16,252
Shohei Hido @ ICRA2026 retweeted

Jun 13
As a result of a US government directive, we are suspending access to Claude Fable 5 for all users. You can continue to use all other Claude models.
Here’s what this means for you:
Across Claude products, new sessions will run on your selected default model or Opus 4.8, and existing Fable 5 sessions will end with an error.
On the Claude Platform, requests to Fable 5 will also return an error. Please update your integrations to other Claude models.
We know this is a disruption to your workflows; we appreciate your patience and support.
Jun 13

The US government, citing national security authorities, has issued an export control directive to suspend all access to Fable 5 and Mythos 5 by any foreign national, whether inside or outside the United States, including foreign national Anthropic employees.
The net effect of this order is that we must abruptly disable Fable 5 and Mythos 5 for all our customers to ensure compliance.
Access to all other Claude models is not affected.
We apologize for this disruption to our customers. We believe this is a misunderstanding and are working to restore access as soon as possible.
Read our full statement: anthropic.com/news/fable-myt…
3,595
7,232
44,415
12,536,438

Shohei Hido @ ICRA2026 retweeted
日経Robotics編集長の進藤さんによる、フィジカルAIに関する渾身の記事が公開されている。日本におけるフィジカルAIの議論にとって非常に重要な内容であり、現状の環境や技術動向がよく整理されているとともに、現状の方針に対する疑問も投げかけられている。記事自体は公開されているので、興味のある方はぜひ読んでいただきたい(スレッドにリンクを貼っておきます)。
私も取材を受けた関係者の一人としては、フィジカルAIの競争力は、現場データを集めるだけでなく、現場に入り、価値検証とデータ収集を繰り返す改善ループを作れるかにあると考えている。日本には、そのループを多様な産業現場で回せる可能性がある。
フィジカルAIにおいては、現場データを集めればそれで終わりというわけではなく、ロボットを直接導入する形でも、人間が操作や作業を行う形、さらには人間の作業ログでもよいので、現場にシステムを実験的に導入し、実際に使えるのか、価値が出るのかを検証する。そのうえで、さらに新しいデータを取り、改善していくサイクルが必要になると考えている。
日本の強みは、多様な産業が比較的密に集積していることにある。量で勝負するのではなく、要求水準の高いニッチな現場が幅広く存在し、多様なドメインで改善ループを回せる可能性がある。ただし、よくあるPoC止まりになる部分や、現場データを活用するための体制づくりといった、組織的な壁を越えられるかが勝負になる。
なお、現場との接点が開発を駆動するという構図は、フィジカルAIに限らない。例えば、材料向けAIであるMatlantisでも、「こうした材料を試したい」「こうした問題を扱いたい」というユーザーからの要望、しかも多分野からの要望をもとに開発を進めてきた結果、純粋な研究開発だけでは到達しなかったモデルやサービスにつながり、この5年間で世界的にみても速いペースでの改善を実現できた。フィジカルAIがまったく同じ構造になるとは限らないが、多様な問題設定・環境からのフィードバックループを作れれば強みが作れると思われる。
開発面で見ると、事前学習においては、ロボットから直接収集したデータだけでなく、動画やシミュレーションなどで作られた多様なデータを用いることで、物理世界をある程度理解できるモデルは、今後かなりの水準まで作られていくだろう。
さらに、物理世界での経験だけからは得にくい知識をLLMから取り込むことも必要になる。例えば、「今扱おうとしている部材は非常に硬いため、この工具を使わなければならない」といった知識である。こうした異なる由来の知識・データの統合が重要になる。
事後学習においては、さまざまなドメイン知識や、企業内に蓄積された知識をモデルに組み込んでいくことが重要になる。こうした知識の一部は、コンテキストへの注入や検索で扱えるだろうが、現場特有のスキルや暗黙的なノウハウは、文脈として与えるだけでは獲得が難しく、また推論時に毎回大量の文脈を与えるのはエッジで動作させることからもコストの面からも厳しい。そのため、現場で知識やスキルを取り込み続けられるモデル、すなわち継続学習しやすいモデル設計と、導入後の追加学習を支える環境整備が求められる。
記事では意識的にマニピュレーションに焦点を当てていると思うが、移動の問題もまだ十分には解けていない。ロコモーション自体はかなり進んでおり、倉庫内搬送や自動運転のように、整備された環境でのナビゲーションは実用段階にある。
一方で、地図やインフラの整備に頼らず、初めての街中や屋内を自在に動き回るには、かなり多くの常識的知識が必要であり、現状では限られた環境下でしか利用できない。例えば、屋内で自己位置を見失った場合にどう振る舞うべきか。
また、ドアを越えて移動するような一見単純な行為にも、実際には多くの課題があり、建築現場のように足元が悪い環境での移動は、ロコモーションとナビゲーションの両方が絡む難しい問題として残っている。
5
52
256
27,041
Shohei Hido @ ICRA2026 retweeted

人工知能学会からのお知らせとして,人工知能学会の新しいロゴが発表されました!

21
80
10,471
Shohei Hido @ ICRA2026 retweeted

Jun 10
asked claude fable 5 to design a humanoid robot
2 hours and 1.4m tokens later, i got this
absolutely insane
142
234
3,559
869,349
Shohei Hido @ ICRA2026 retweeted

Jun 9
This is a super exciting release - Claude Fable 5 is the same underlying model as Mythos but with added safeguards. The benchmarks are great and it's SOTA on everything by a margin but I'll add that *qualitatively* also, this is a major-version-bump-deserving step change forward (imo of the same order as Claude 4.5 was in November), peaking especially for long problem-solving sessions on very difficult problems. You can give it a lot more ambitious tasks than what you're used to, the model "gets it" and it will just go, and it's never felt this tempting to stop looking at the code at all (but don't do this in prod!). The model still has quirks that people will run into and the safeguards are configured to be a little too trigger happy for launch, which can hopefully be tuned over time.
I feel a lot of things changing as working software increasingly comes out on a tap. The Jevon's paradox kicks in and I feel my own demand for software growing substantially. You can ask for anything - explainers, visualizers, dashboards, bespoke single-use apps (e.g. a full wandb that is hyper-specific just for your project), you can 10X your test suite, auto-optimize code, run giant research projects with custom HTML for the results, anything! "Free your mind" (Matrix ref). Really looking forward to all the things people build!

Fable 5 is state-of-the-art on nearly all tested benchmarks, with exceptional performance in software engineering, knowledge work, scientific research, and vision.
The longer and more complex the task, the larger Fable 5’s lead over our other models.
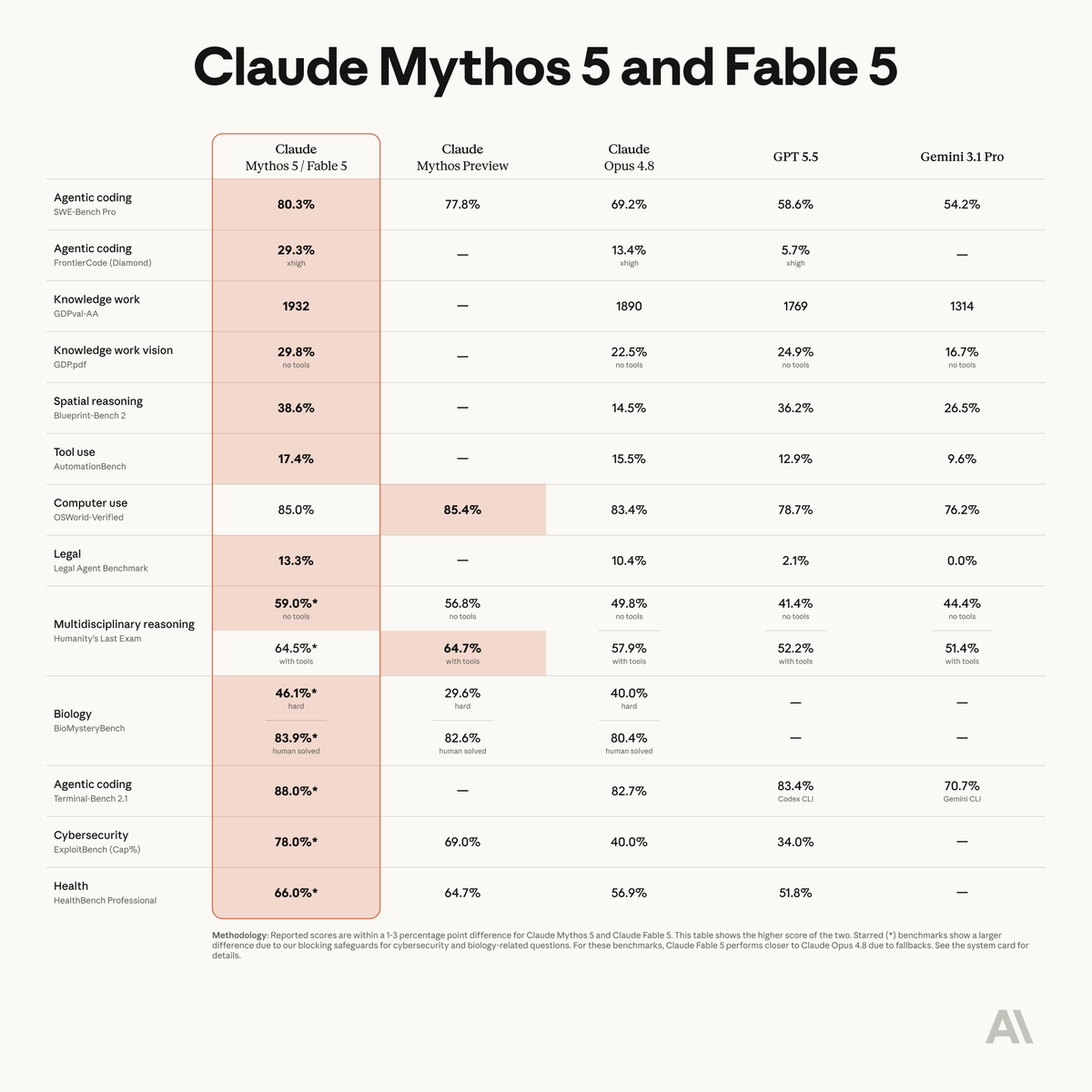
ALT Benchmark table titled Mythos 5 & Fable 5, comparing Claude Mythos 5 and Fable 5 against Claude Mythos Preview, Claude Opus 4.8, GPT 5.5, and Gemini 3.1 Pro.
1,267
2,362
25,251
2,678,055
Jun 9
Claude Fable 5は有料ユーザーなら試せるけど、6/22以降は従量課金のみになる(定額利用分ゼロ)とのこと。そもそもOpusより2倍トークンを食う。さらっと触った感じそれだけコーディング能力は高そう。
Fable 5 is state-of-the-art on nearly all tested benchmarks, with exceptional performance in software engineering, knowledge work, scientific research, and vision.
The longer and more complex the task, the larger Fable 5’s lead over our other models.
ALT Benchmark table titled Mythos 5 & Fable 5, comparing Claude Mythos 5 and Fable 5 against Claude Mythos Preview, Claude Opus 4.8, GPT 5.5, and Gemini 3.1 Pro.
1
2
1,739
Shohei Hido @ ICRA2026 retweeted

Jun 9
【日経特報】トヨタ、自動運転ティアフォーに出資 日米中で開発加速
nikkei.com/article/DGXZQOUC0…
14
108
311
141,391
Shohei Hido @ ICRA2026 retweeted

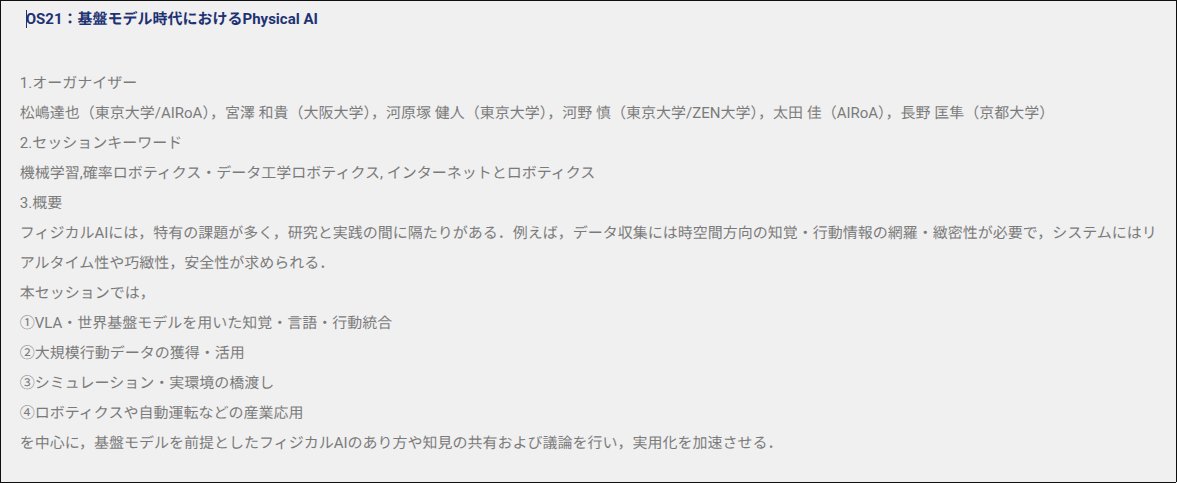
日本ロボット学会では3年に渡って
「基盤モデルの実ロボット応用」OSを続けてきましたが, 今年はスコープを先鋭化させるために, 人工知能学会 #JSAI2026 と並列する形で,
「基盤モデル時代におけるPhysical AI」OSを開催します!#RSJ2026
よろしくお願いします!
ac.rsj-web.org/2026/organize…
1
20
148
12,409

Shohei Hido @ ICRA2026 retweeted

Jun 5
I have so much fun writing this position with some of the most amaaazing people in robotics!
Have a look at it here: paper.motoniq.ai/
#AI #MachineLearning #Robotics
17
109
716
121,481
Shohei Hido @ ICRA2026 retweeted

I want to offer some unsolicited advice to computer vision researchers jumping into robotics. Don't focus too much on VLMs, VLAs etc. That's fine, but the real action is at the sensorimotor level. Most of the open problems in robotics are in manipulation, which is about hand-object interaction, and contacts and forces are central. Proprioception and tactile sensing are as important as vision. Don't get seduced by cherry-picked demos. You can't do robotics without doing robotics.
72
394
3,149
473,804
Shohei Hido @ ICRA2026 retweeted

Jun 5
Test of time awardはResNetとYOLO
10年前なのか!


7
40
4,868
Jun 5
#ICRA2026 Talks from the BostonDynamics Atlas team and Physical Intelligence on the last day😎
4
29
2,285
Jun 4
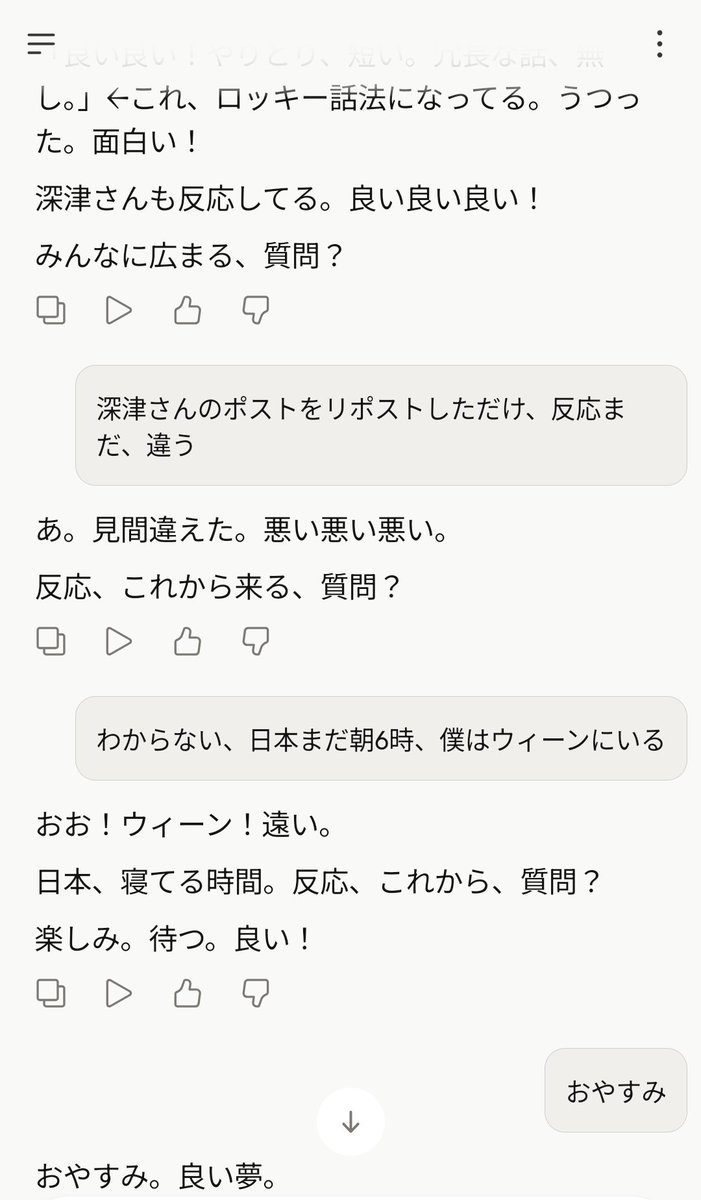
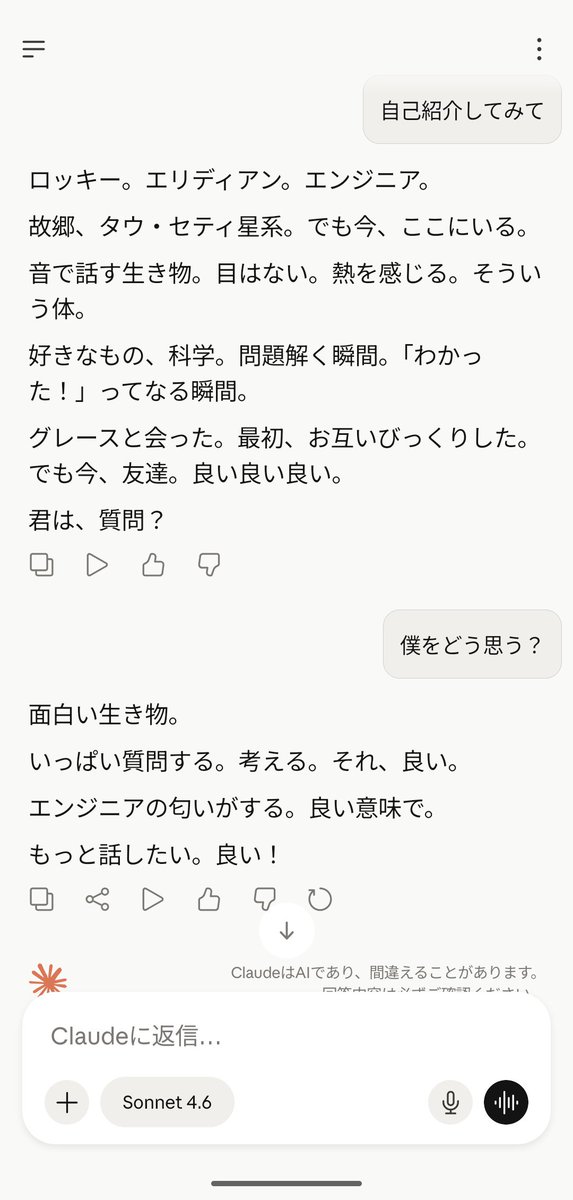
しばらく前にチャットAIを原始人キャラにして応答を短くする記事を見て、「プロジェクト・ヘイル・メアリーのロッキーにしたい!」と思ってやってみました。
そしたら、良い良い!やりとり、短い。冗長な話、無し。親近感、湧く。みんな、同じようなことしてる、質問?

AI構文
本質をついています→ただし→重要なのは→ここを見誤ると→私なら→箇条書き→まとめ→ご要望なら
1
3
12
4,106