
Joined December 2014
- Tweets 841
- Following 831
- Followers 266
- Likes 4,797
38 Photos and videos








May 22
ah 4th 🙃. p fun tho
May 18

We're spending $1,000,000 hiring agent orchestrators at @firecrawl.
Just solve all 60 problems in the our CTF challenge, and we’ll make it very worth your while.
ctf.firecrawl.dev
78
slimylemon retweeted

May 19
Most human tasks are not Markovian, the optimal next action cannot be determined solely by looking at the current state. It depends heavily on the past trajectory, the original intent, and context constraints. An agent that cannot compress and track its past trajectory with absolute fidelity is maybe 20% as useful as one that can.
89
70
961
55,639
slimylemon retweeted

Feb 23
build is hiring operators in bangalore

8
5
210
15,644
Feb 12
Took me longer than it should’ve to notice this.
openclaw completion was running on every zsh startup (oops)
Lazy-loaded it, now my terminal feels snappy again.
2.4s → 0.03s
3
308
slimylemon retweeted

Feb 9
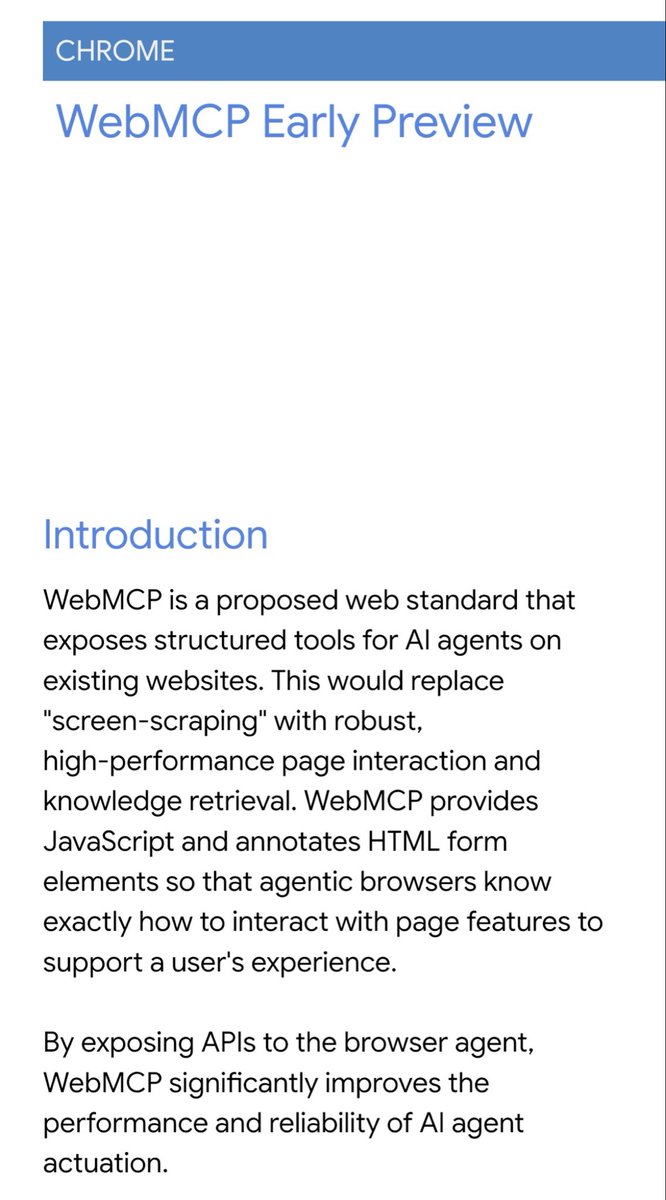
Chrome 146 includes an early preview of WebMCP, accessible via a flag, that lets AI agents query and execute services without browsing the web app like a user.
Services can be declared through an imperative navigator.modelContext API or declaratively through a form.
118
368
2,757
1,272,605
Jan 6
asked claude to help me stop playing so much Dota 2.
10 mins later: a daemon that polls OpenDota API for my matches, then chmod -x's the game binary after 1 game/day.
can't open what can't execute. self-control via code.
83
slimylemon retweeted

17 Jul 2025
The browser sees everything. This is the reason we’re getting so many new AI-first browsers from The Browser Co, Perplexity, and soon OpenAI. So they can “see” data that they increasingly cannot scrape.
AI feeds on data. It gets the data by automatically scraping the web. But scraping is no longer free. CDNs like Cloudflare are making scraping harder by blocking it by default, and others will soon follow. Startups like TollBit are empowering tons of large publishers to charge for being scraped, building a new open web economy.
But consumers want AI. We can’t get enough of it. And as AI answers increasingly eat traditional web search, AI will be doing much more browsing on behalf of us humans (scraping).
This creates a paradox: consumer behavior is shifting to AI, but AI is running out of fuel to meet the demand. So what happens? AI companies build browsers.
As humans consume content with these browsers, the AI company can “see” data that is increasingly being blocked or monetized. The most interesting this about this strategy is that AI companies don’t even need meaningful market share or customer ubiquity for this strategy to work. They just need a large enough slice of all browsing to get a taste of most of the web’s data.
It’s a whole new business model for the web and the beginning of a new browser war.
h/t @scottbelsky @stevejang
31
40
406
66,360

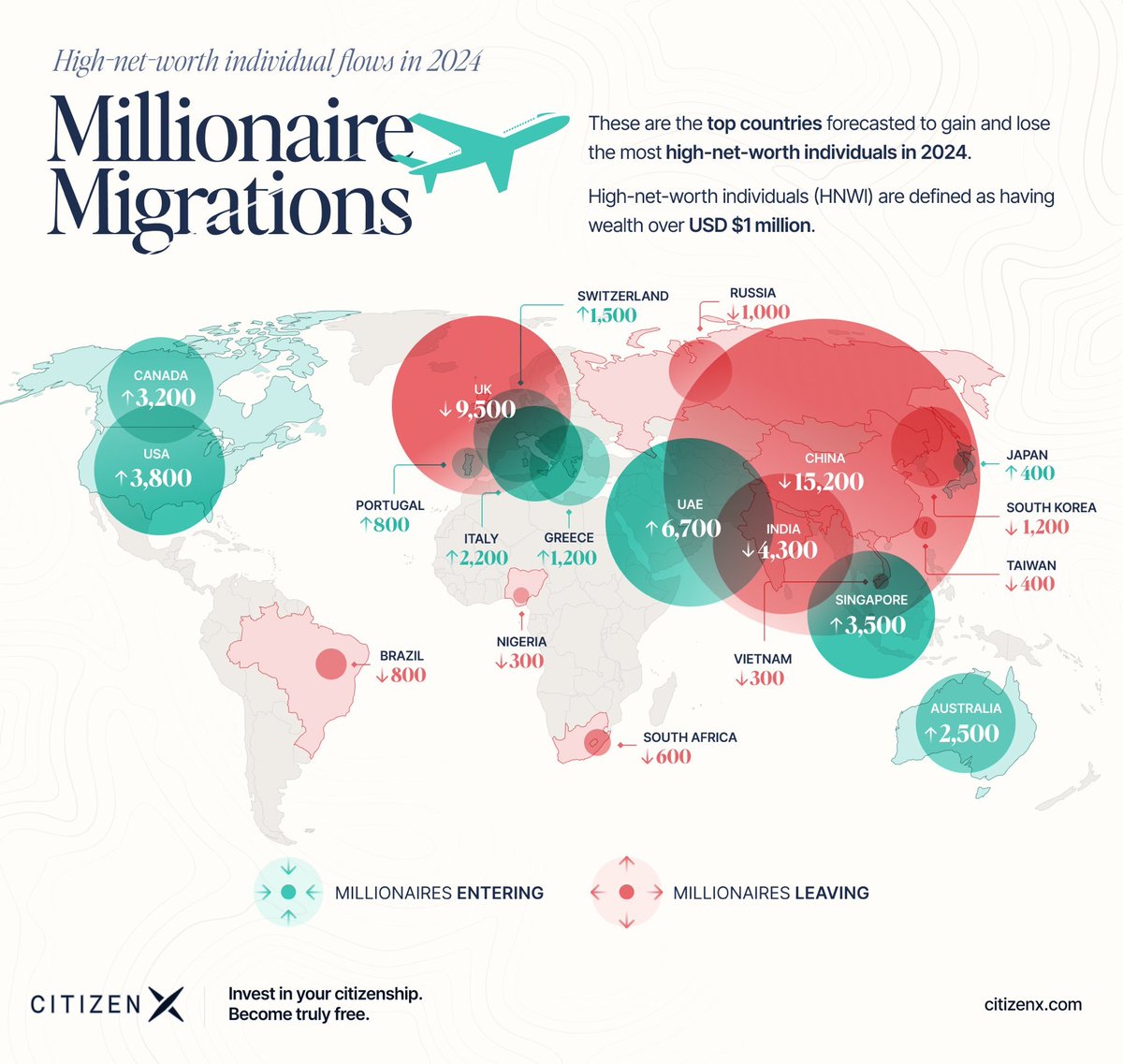
Capital is moving to Dubai, Singapore, and Australia. Talent will follow.
25 Jun 2025

Capital migration will be an interesting phenomena to observe in the coming decades.
The rich are leaving declining nations and creating hubs elsewhere.
486
1,555
9,882
1,709,757
24 Jun 2025
Pro tip for @TaskmasterAI users:
Always have the LLM assign any TODOs generated as future subtasks.
This keeps your project connected and prevents breakage!
2
13
848
slimylemon retweeted

23 Jun 2025
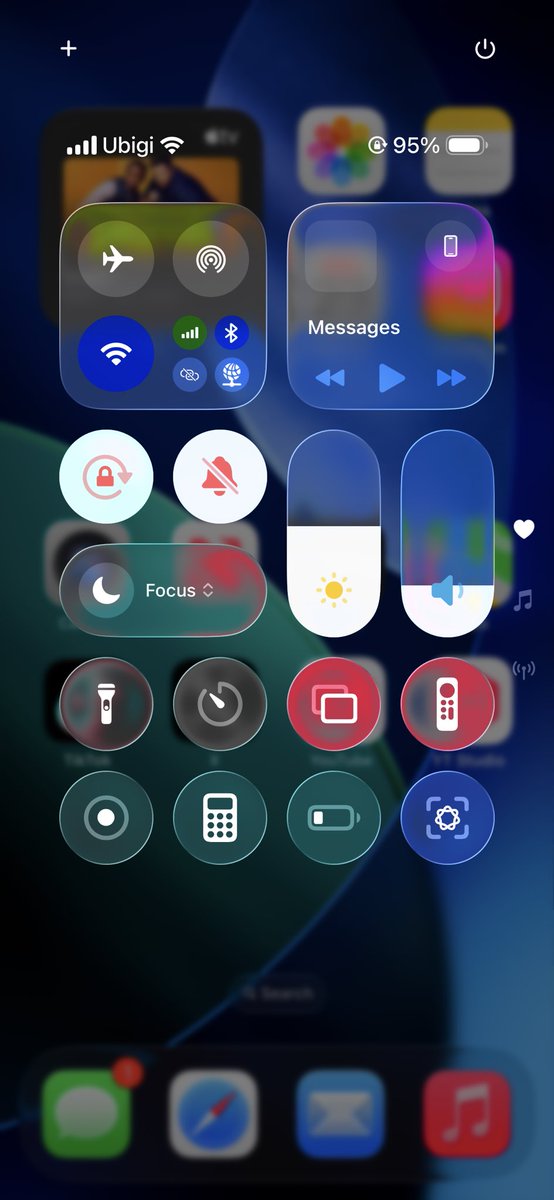
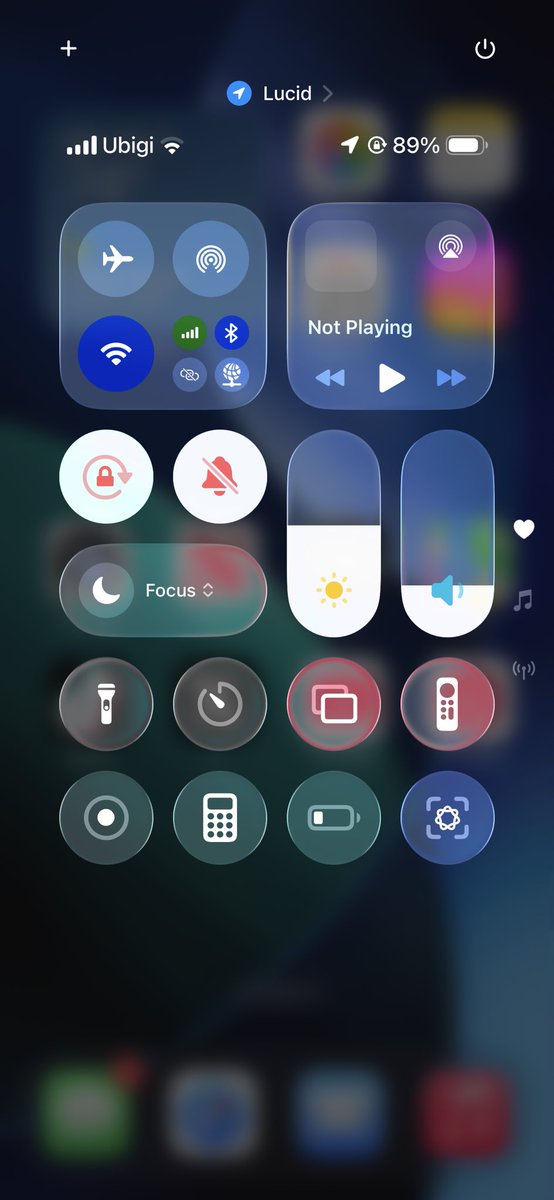
iOS 26 Beta 1 vs Beta 2
For all those who freaked out about readability, turns out just crank up the blur and it’s fine
58
19
800
79,377
23 Jun 2025
if sonnet doesn't fix your bug in 3 tries, switch to opus and save your time
3
108


how to gain code execution on millions of people and hundreds of popular apps
and of course, firebase was (partially) the cause
kibty.town/blog/todesktop/
101
279
3,222
696,523
slimylemon retweeted

22 Feb 2025
1/5 imagine a discord server that has community, culture and tools - all for free.🧵
i know, hard to picture in web3 where knowledge is so often gatekept🔒
well, time to study Nuonomics [@Nuotrix] 👇
194
126
217
9,707