
ロボット大好き人間 製作過程とか趣味のこと
Joined November 2018
- Tweets 12,363
- Following 1,983
- Followers 2,817
- Likes 38,273
1,559 Photos and videos












ツンの作業場 retweeted

Jun 9
出力を一時停止してナットや磁石を埋め込むテクニックがありますがそれの応用。透明な板を埋めてみました。後で接着する必要が無く簡単です。
透明に限らず広い平面を素早く出力したい時にも使えるかも。


10
109
701
56,696
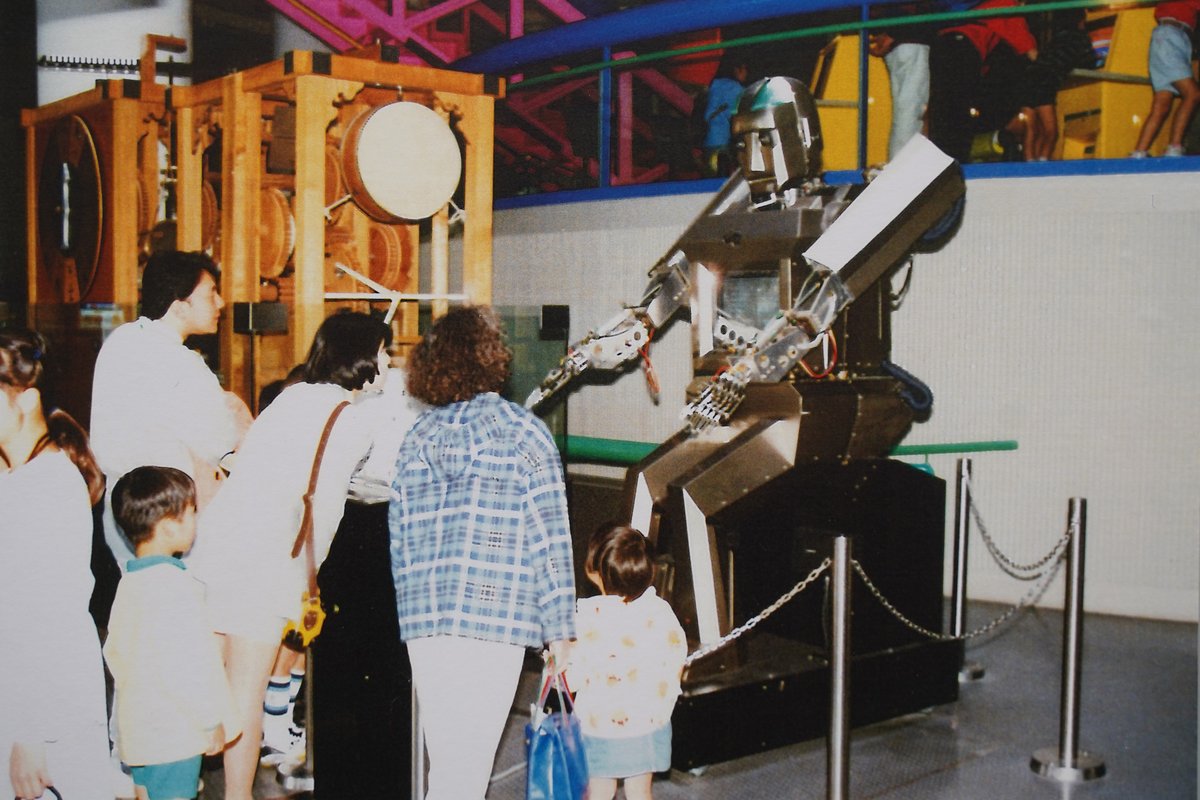
こんな展示やってたんだ、知らなかったの悔しい、グリ夢、ブルー夢出てきたんだ!
ロボくん、タッチパネルで会話できたような覚えがある。空気圧で動いてたのかな?音が少し怖かった
May 12

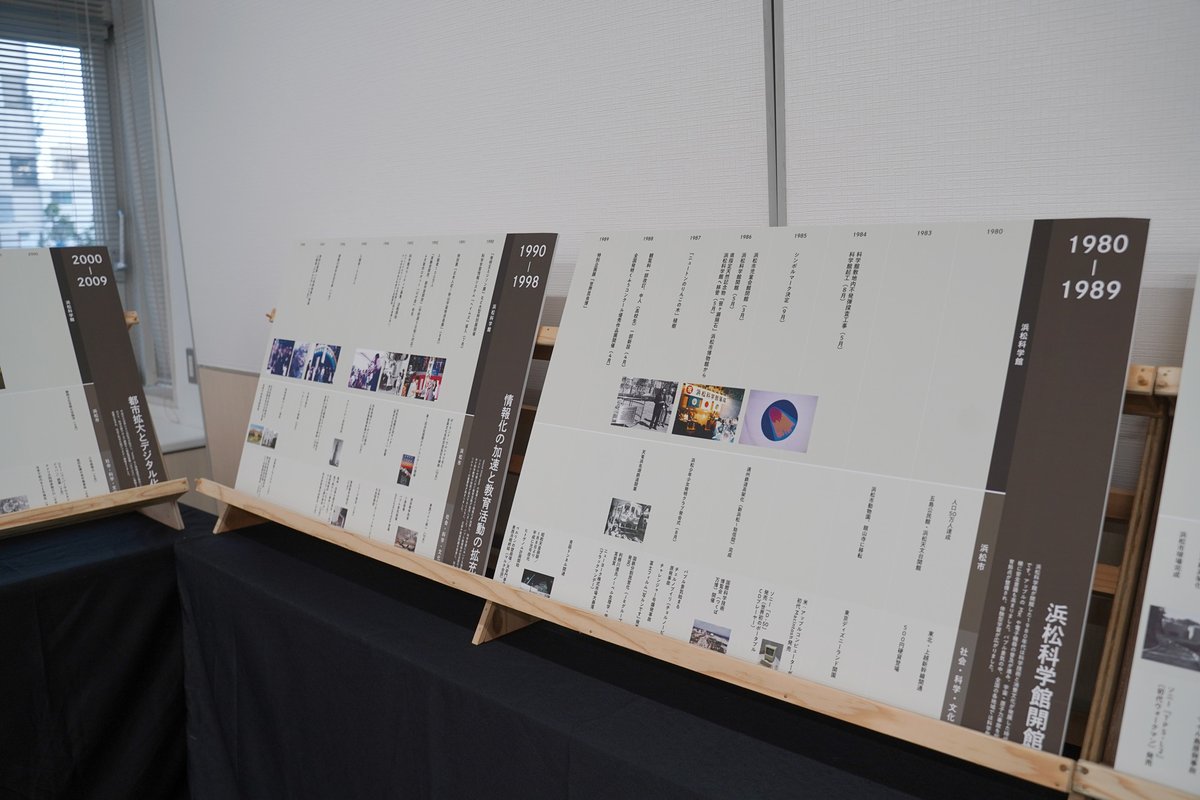
▲ 40周年特別展示「浜松科学館の歴史」 ▲
浜松科学館の開館40周年を記念して、特別展示「浜松科学館の歴史」を5/31(日)まで開催しています。
館の40年のあゆみを、当時の出来事や浜松市・社会の変化とあわせて、年表形式のパネルでご紹介。
開館当時の建築模型や、かつて人気を集めたお話ロボット「#ロボくん」など、貴重な資料の一部も展示しています。
浜松科学館が、時代や地域の変化とともにどのように歩んできたのか。
そして、皆さまそれぞれの思い出を振り返り、共有していただける機会になればうれしいです。
mirai-ra.jp/event/42299/



1
2
4
616
ツンの作業場 retweeted

May 12
▲ 40周年特別展示「浜松科学館の歴史」 ▲
浜松科学館の開館40周年を記念して、特別展示「浜松科学館の歴史」を5/31(日)まで開催しています。
館の40年のあゆみを、当時の出来事や浜松市・社会の変化とあわせて、年表形式のパネルでご紹介。
開館当時の建築模型や、かつて人気を集めたお話ロボット「#ロボくん」など、貴重な資料の一部も展示しています。
浜松科学館が、時代や地域の変化とともにどのように歩んできたのか。
そして、皆さまそれぞれの思い出を振り返り、共有していただける機会になればうれしいです。
mirai-ra.jp/event/42299/
1
27
79
5,958
ツンの作業場 retweeted
Jun 10
▲ こんな浜松科学館、覚えていますか? ▲
浜松科学館は今年で40周年。
心に残っている展示や体験、人との交流など、皆さんの思い出を募集しています。
また、「こんな展示があったらいいな」「こんな体験をしてみたい」といった未来への希望やアイデアも募集しています。
昔の写真や思い出の画像をお持ちの方は、ぜひあわせてお寄せください。いつの時代でも歓迎です😊
mirai-ra.jp/event/42496/
#浜松科学館40周年


27
122
4,956
ツンの作業場 retweeted

Cool. A differential leg from RcLab!
3
16
127
9,982
ツンの作業場 retweeted

KOJIMA PRODUCTIONS × PARCO GAMES STRAND STORE にて
DNSYS × DEATH STRANDING 2 コラボレーションエクソスケルトンの特別展示・体験イベントを開催いたします👍
日時:6月13日(土)・14日(日) 11:00〜21:00
会場:渋谷PARCO 5F STRAND STORE 会場内
対象アイテム:
「Dnsys Z1 Exoskeleton Pro - DEATH STRANDING 2: ON THE BEACH Edition」
商品詳細:
dnsys.ai/pages/z1-exoskeleto…
※体験時間はお一人様あたり10〜15分程度を予定しております
※混雑状況に応じて整理券を配布する場合がございます
#DeathStranding2 @Dnsys_JP


1
100
645
254,815


ツンの作業場 retweeted

LimX Dynamics is cooking here.
The walk is slow but the control looks clean: wide feet for stability. quiet torso. arm motion without losing balance.
That is the hard part I like. A biped robot moving its upper body while staying planted is already a serious control problem.

This is a disgrace to the entire robotics industry.
Don’t blame the Unitree G1 for hitting that kid in the stomach.
The problem is the person controlling it. They clearly don’t understand spacing movement
1
10
47
15,499
ツンの作業場 retweeted

Jun 6
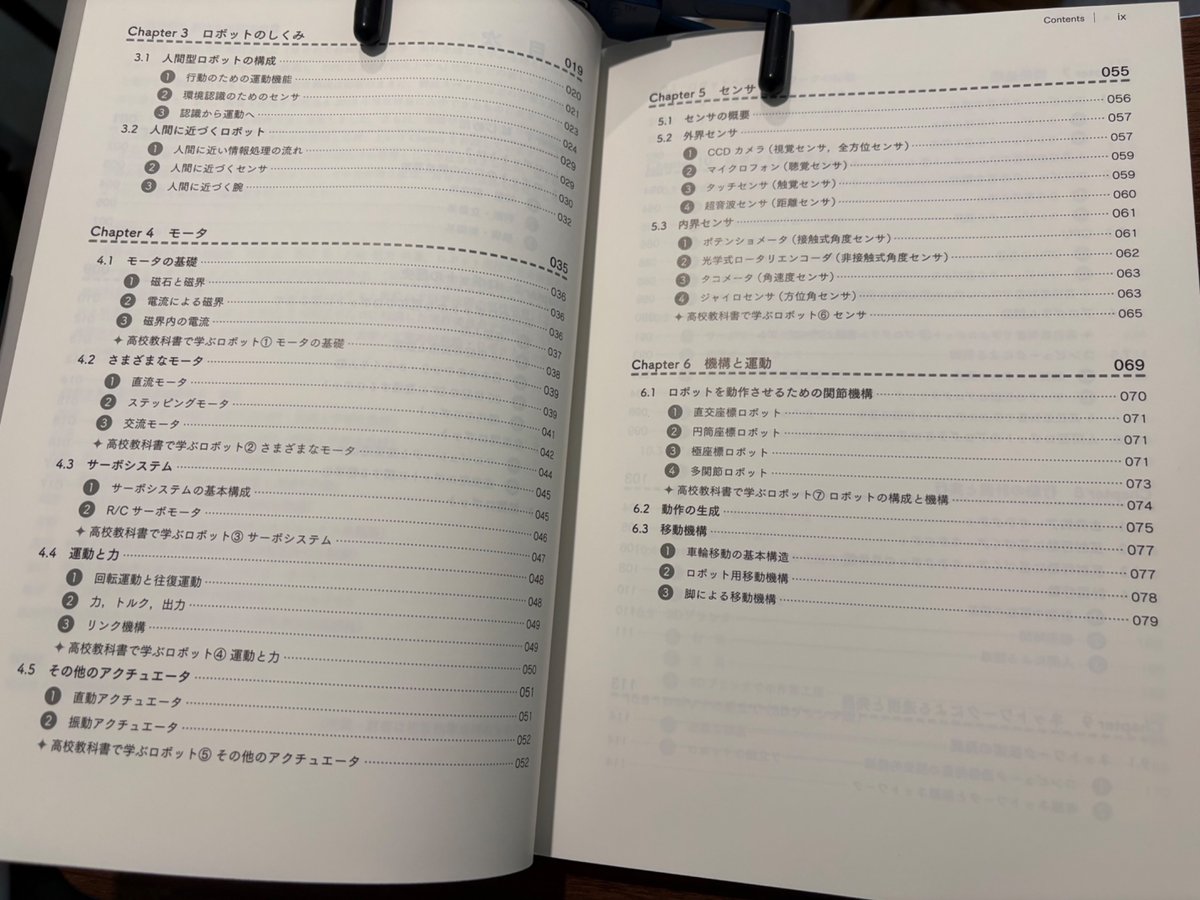
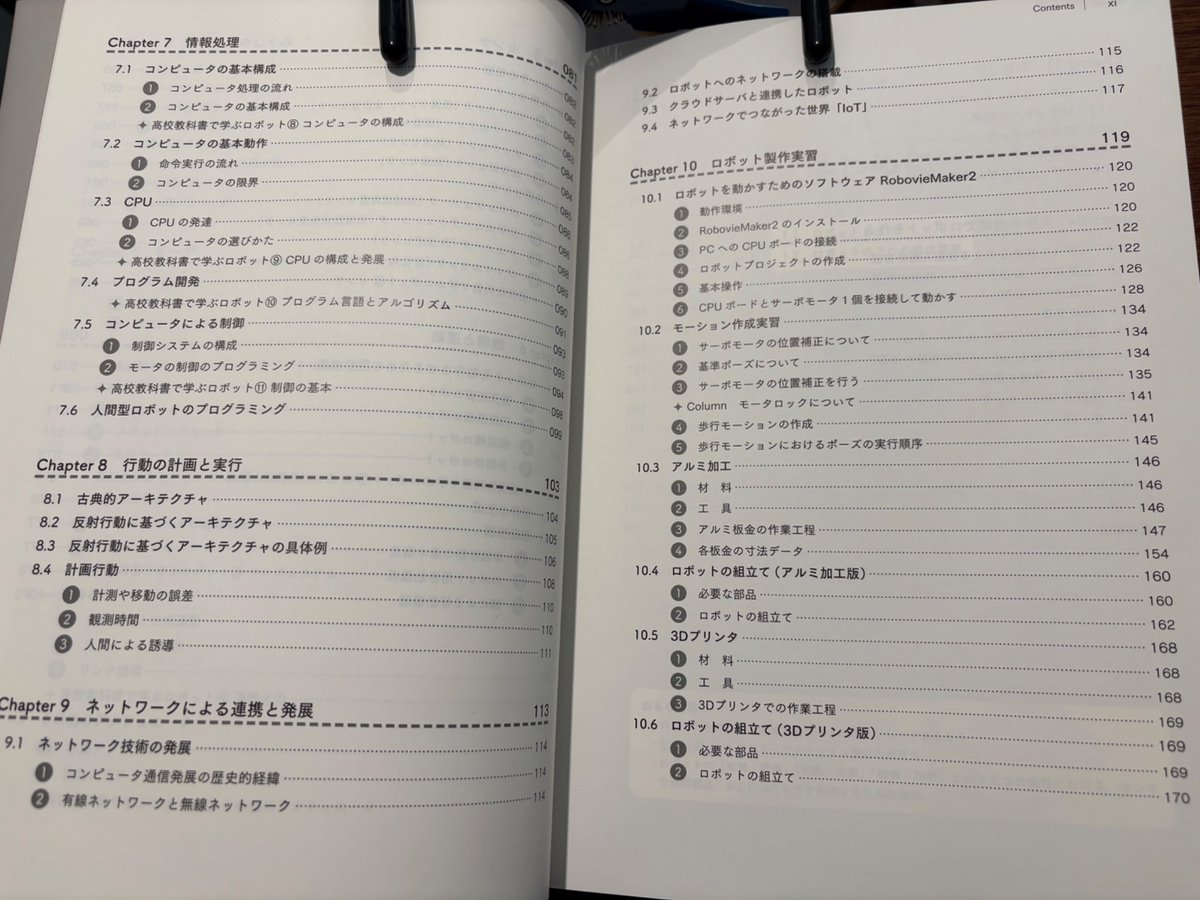
適当に買った はじめてのロボット工学 という本を読了
2019年の本ということでだいぶ内容は古かったけど基礎的なことを網羅的に知れた
ロボット制作演習はひと昔前の内容だったので流し読みした
11
83
5,669
RT @ouraring: より薄く、小型で快適に進化したOura Ring 5。1週間のバッテリー持続時間で50以上の指標を測定し、実践的な健康インサイトを毎日提供します。

93
ツンの作業場 retweeted

Jun 3
統合ロボティクスカンパニー『HIBANA ROBOTICS』設立のお知らせ prtimes.jp/main/html/rd/p/00…
32
209
80,289

