
Humanoid robots too cheap to meter.
Joined April 2022
- Tweets 2,215
- Following 2,411
- Followers 4,131
- Likes 22,825
337 Photos and videos







Pinned Tweet

May 24
I've updated my zobotics website with a "Looking for opportunities" section. Still vibing in circles on the wording, but this is the gist.
If you would like to chat or our previous chat didn't happen for whatever reason I've added a Cal link.
Link in my profile.

1
2
38
3,421
Looking good!

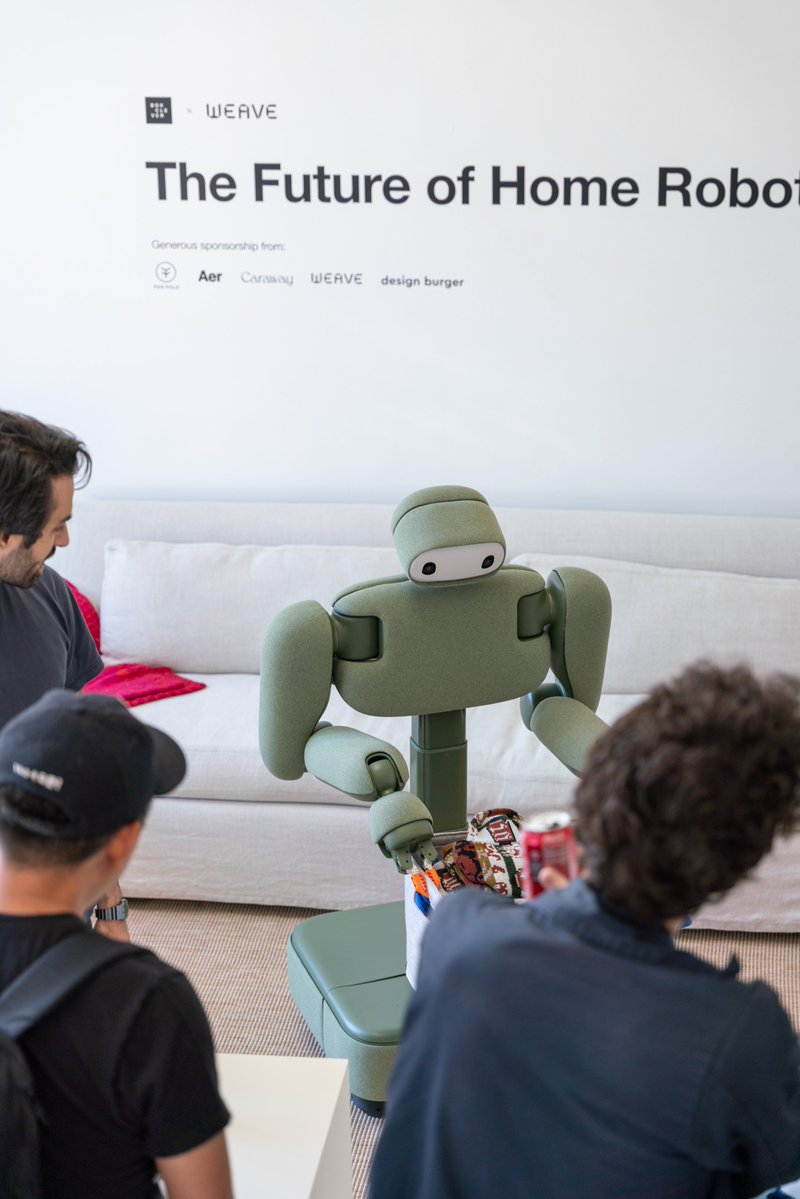
The showing we got for Isaac 1 yesterday was everything we could've hoped for
Roboticists, engineers, designers, students, kids, grandparents all in one place
Seeing how home robots will change the way we live for the better


1
16
2,294
I very much like the head design. So difficult to get right.
How the elbow is offset is interesting and the mobile base looks great too.
1
7
344
Very cool to see someone working on an antagonistic design.
Pros: No tension issues plus easy variable stiffness.
Cons: Double the motors.

We're building a humanoid from scratch — and today its legs learned to walk. 12 DOF, trained in simulation by imitating a reference gait, exported as a single ONNX policy.
Can't wait to finish the hardware for a real-world test. Sim2real is hard — but it's going to be a genuinely exciting challenge.
#robotics #humanoid #reinforcementlearning
5
7
65
7,345
Extra double bonus points that they are fanatical about keeping everything within human proportions.
3
463
Jun 12
Peek a boo

2
2
30
3,911
Jun 11
So true.


1
13
1,021
Billy Zelsnack 🤖/acc retweeted

Jun 10
This makes an omnitrack motion tracking system replacement from scratch and breaks down the entire process. Best engineering YouTube video I’ve seen in a long time.
youtu.be/kYVqL_DqBis?si=N_RI…
1
1
5
1,153
Jun 10
So many teleop folks use WebRTC. Great for Google Meet, not so much for teleop.
This @Adamorobotics demo is a nice showcase of why WebRTC is the wrong choice for teleop.
Jun 9

Long-distance real time teleop.
A lot of people see teleop as a dirty secret in robotics, but only if you're using it whilst saying you're fully autonomous.
It's actually a great step to get to fully autonomy.
We built @Adamorobotics , a low-latency long-distance teleoperation platform for robots to bypass the real-world data bottleneck.
Here's a comparison video of our robot being teleoperated in London
Adamo on the left versus google meets on the right (a WebRTC-based solution)
As you can see there's a big delay. That delay makes teleoperating a lot harder, and the data you capture of far inferior quality.
Adamo is now self-serve so you can feel what low latency long distance teleop feels like for yourself.
6
5
50
8,857
Jun 10
Jun 10
This robot is being controlled by someone 5,500 miles away.
This is a demo of our teleoperation stack at @Adamorobotics. The robot is in our London office. The operator is in San Francisco.
The bottleneck in robotics has shifted from R&D to deployment. Robots still can't handle every edge case. When autonomy fails, you need a human in the loop, fast.
We've built the fastest teleoperation stack on the planet for remote human control of any robot, anywhere in the world.
This is what makes real-world deployment possible today.
Every day, we power thousands of interventions for humanoid and autonomous vehicles, and we're only just getting started.
You can now try it yourself for free, at adamohq.com
1
2
658
Jun 10
Awesome work Saba!
Jun 10

Meet Axol: a dual-arm robot designed for teams working with physical AI. Made in America.
Axol is for builders who believe robots should work, in the real world, not just staged environments, and that the future of physical AI should be open not closed.
25
3,610
Jun 10
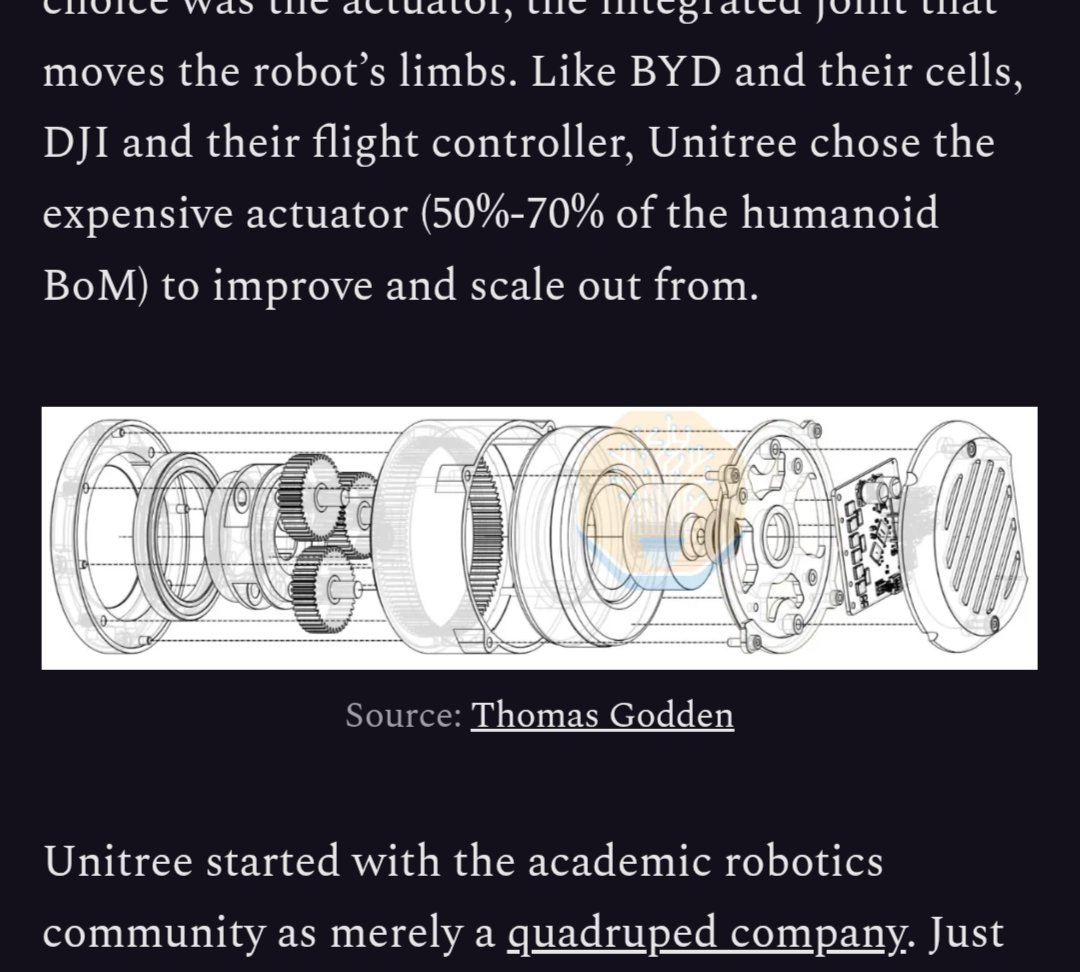
This does not help me be less triggered by analyst reports.
Jun 10

Hey so @SemiAnalysis_ why did you put your watermark on my image to include in a "paid" article without asking.
11
1,331
Jun 10
Super cool.
Jun 10

asked claude fable 5 to design a humanoid robot
2 hours and 1.4m tokens later, i got this
absolutely insane
2
51
7,800
Their interview process is actually pretty interesting and not lame.
Stage 2: Take-home project (4 hours)
We ask you to implement a web app within 3 hours. You are strongly encouraged to use AI coding tools to help you.
Afterwards, one of our engineers will take a 1 hour call with you and ask you questions about the code you produced.
The goal is to assess whether you’re capable of making rapid progress on software engineering tasks and whether you understand your own code.
We record this call so that people involved in the hiring process can review it. Recordings are used only for hiring evaluation.
Jun 9

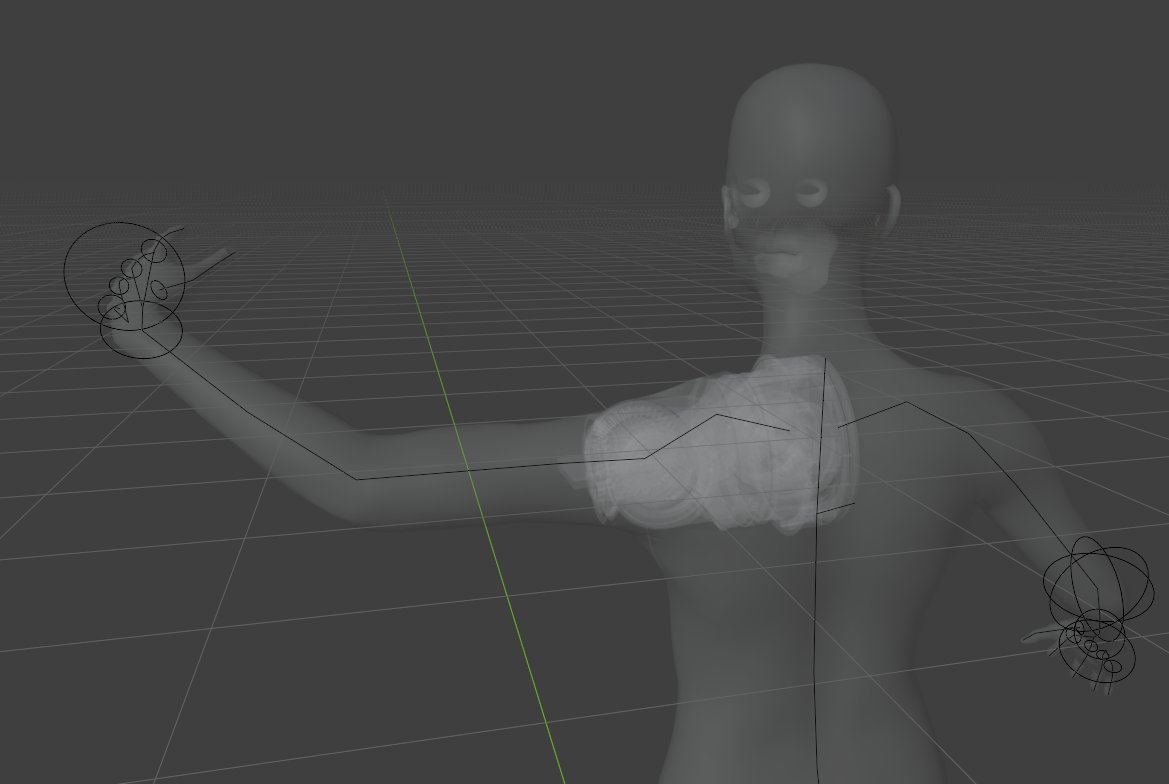
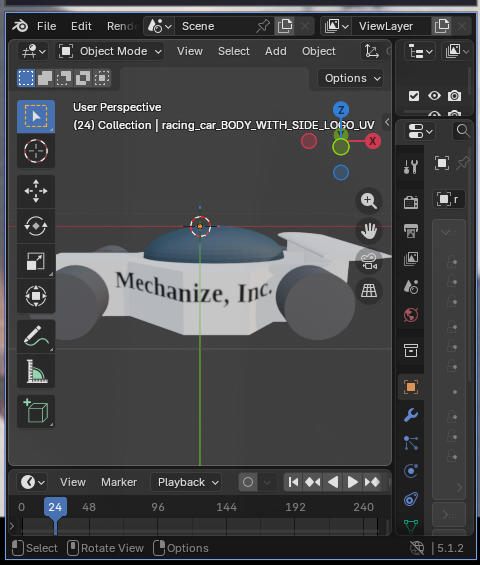
This took me since last Thursday to solve. I had it solved by this morning. I'm only posting it this late in the evening because i had to learn blender.
mechanize.work/apply
Rest of the thread is how I solved it (it was the dumbest way possible)
3
24
4,253
Link.
mechanize.work/how-our-inter…
I would add a step 2.5 though.
2.5 Here's the code the previous person we hired created. Clean it up and add a cool feature to it.
6
560
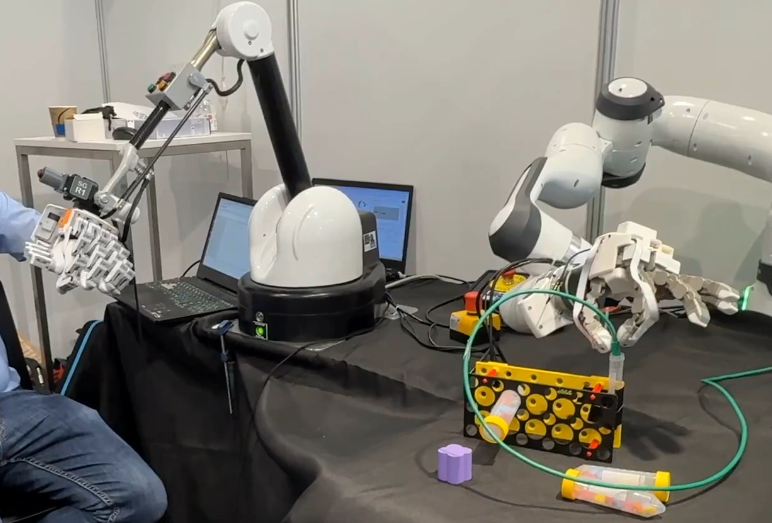
Whoa. Look at this beast!
Anyone get a change to try it at ICRA?
6
4
40
4,348